- Methode der harmonischen Balance
-
Die Methode der harmonischen Balance ist ein Verfahren der Schwingungslehre um nachzuweisen, ob (nichtlineare) Dauerschwingungen auftreten und ob diese stabil sind. In der Regelungstechnik wird es zu einem Verfahren zum Nachweis der Stabilität von nichtlinearen Systemen umgedeutet.
Die Auswertung kann sowohl algebraisch als auch graphisch erfolgen. In der graphischen Deutung zeigt sie Ähnlichkeit mit dem Stabilitätskriterium von Nyquist und dem Frequenzkennlinienverfahren, was die Anwendung vereinfacht. Es ist weiterhin unter den Begriffen Harmonische Linearisierung und Methode der Beschreibungsfunktion bekannt.
Inhaltsverzeichnis
Harmonische Balance
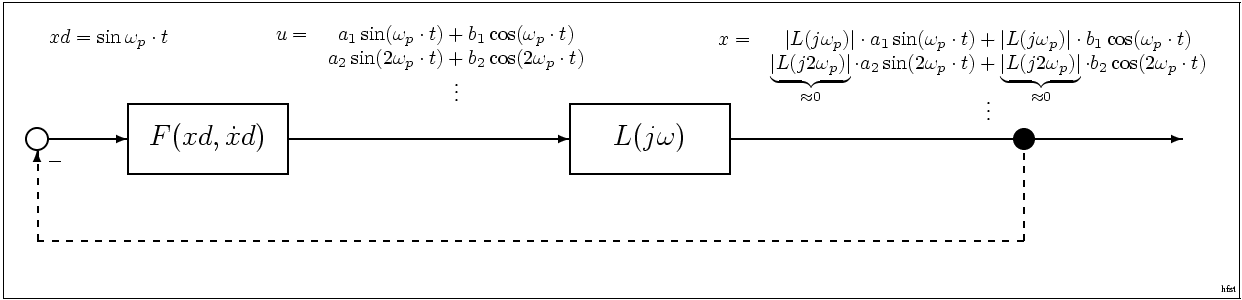
 Nichtlineares System im Zustand der harmonischen Balance
Nichtlineares System im Zustand der harmonischen Balance
Das Verfahren geht von einem nichtlinearen Regelkreis, bestehend aus einer nichtlinearen Kennlinie und einem linearen Teil mit der Übertragungsfunktion L(jω) aus. Das lineare Teilsystem L(jω) sei stabil, habe höchstens einen Pol im Ursprung und Tiefpassverhalten.
Nach Nikolai Mitrofanowitsch Krylow und Nikolai Nikolajewitsch Bogoljubow [1] spricht man vom Zustand der harmonischen Balance, wenn sich das System im Zustand einer Dauerschwingung mit der Frequenz
 befindet. Es gelte
befindet. Es gelte- xd eine sinusförmige Größe mit der Kreisfrequenz ωp
- dann ist u ebenfalls eine periodische Größe, die aus einer Grundschwingung mit der Frequenz ωp und deren ganzzahlinge Vielfachen zusammengesetzt ist. Die einzelnen Amplituden lassen sich nach den Regeln der Fourierreihe bestimmen.
- Hat nun L(jω) Tiefpassverhalten, so dass Frequenzen oberhalb ωp gedämpft werden, so sind x und damit xd sinusförmige Größen und Bedingung 1 ist erfüllt.
Damit brauchen auch die Vielfachen von ωp in u nicht berücksichtigt zu werden. Damit ist die Nichtlinearität ein System, das eine Schwingung mit der Frequenz ωp und der Amplitude A in eine phasenverschobene Schwingung mit gleicher Frequenz und anderer Amplitude überführt. Mit
- xd(t) = Aejωt

kann ein Ersatzfrequenzgang
gebildet werden. Dabei ist
Es sind dabei a1,b1 die Grundwellenkoeffizienten von u bei Anregung mit xd = Asin(ωpt). Damit ist
Für typische Nichtlinearitäten, bei denen F nur von xd oder im Falle von Hysteresekurve vom Vorzeichen von
 abhängt, sind a1,b1 unabhängig von ωp. Damit ist
abhängt, sind a1,b1 unabhängig von ωp. Damit ist- N = N(A) = R(A) + jI(A)
und damit nur von der Amplitude, nicht aber von der Frequenz abhängig.
N(A) wird als Beschreibungsfunktion bezeichnet. Da sie im Zustand der harmonischen Balance ähnlich einer Übertragungsfunktion die Kennlinie ersetzt, wird auch von harmonischer Linearisierung gesprochen. Im Gegensatz zur Linearisierung gilt sie aber nur im Zustand der harmonischen Balance und aus Stetigkeitsgründen in deren Umgebung [2].
Der Zustand der harmonischen Bilanz wird durch
- u1 = N(A)xd
- − xd = L(jωp)u1
also
- (L(jωp)N(A) + 1)xd = 0
bzw. da es immer gelten soll
- L(jωp)N(A) + 1 = 0
Wenn der Zustand der harmonischen Balance existiert, erfüllen seine Amplitude A und ihre Kreisfrequenz ωp vorstehende Gleichung.
Bestimmung der Beschreibungsfunktion
Der Realteil wird aus
 ,
,
der Imaginärteil
bestimmt.
Hängt die Nichtlinearität höchstens von
 ab, liegt also eine Hysteresekurve vor, so kann I(A) vereinfacht werden zu
ab, liegt also eine Hysteresekurve vor, so kann I(A) vereinfacht werden zu ,
,
wobei Fo(xd) den oberen, Fu(xd) den unteren Zweig der Hysteresekurve beschreibt. I(A) ist also die eingeschlossene Fläche der Hysteresekurve und verschwindet, wenn die Nichtlinearität eindeutig ist.
Beispiele
Name Bild Beschreibungsfunktion N(A) Nichtlineare Ortskurve 
Zweipunktglied  0" border="0">
0" border="0">Begrenzung Lösung der Gleichung der Harmonischen Balance
Um festzustellen, ob ein Grenzzyklus vorliegt oder nicht, muss die Gleichung der harmonischen Balance
- L(jωp)N(A) + 1 = 0
gelöst werden. Dies ist einerseits algebraisch und durch Näherungsverfahren, anderseits geometrisch möglich.
Algebraische Lösung
Es wird die komplexe Gleichung
- N(A) = − L(jωp) − 1
in den Real- und Imaginärteil
- Re(N(A)) = − Re(L(jωp) − 1)
- Im(N(A)) = − Im(L(jωp) − 1)
aufgeteilt. Der Lösungsweg vereinfacht sich, wenn die Kennlinie eindeutig ist und daher Im(N(A)) = 0 gilt. In diesem Fall kann zuerst aus der Gleichung für den Imaginärteil die Kreisfrequenz des Grenzzyklus und aus der Gleichung für den Realteil seine Amplitude bestimmt werden. Diese Rechnung vereinfacht sich, wenn L(jω) reines Verzögerungsverhalten hat und damit L(jω) − 1 ein Polynom in ω ist.
Geometrische Lösung
Ausgangspunkt ist hier die Darstellung
die in die Ortskurven
- z = L(jω) (bekannte Ortskurve der linearen Regelungstheorie)
und
 (nichtlineare Ortskurve [3])
(nichtlineare Ortskurve [3])
aufgeteilt wird. Schneiden sich beide Kurven, so liegt eine nichtlineare Grenzschwingung vor. Für die Lösung im Bode-Diagramm sei auf [4] verwiesen.
Umdeutung als Stabilitätskriterium
Stabilität bedeutet im Wesentlichen, dass Auslenkungen aus einer einmal erreichte Gleichgewichtslage nicht dazu führen, dass diese endgültig verlassen werden. Vor diesem Hintergrund können folgende Fälle unterschieden werden.
- Die Trajektorie strebt einer neuen Gleichgewichtslage zu
- Die Trajektorie strebt ins Unendliche
- Die Trajektorie strebt mit der Zeit einer Kurve zu, die sie als Grenzkurve besitzt
Da der zweite Fall in realen Systemen wegen der Begrenzung aller Zustandsgrößen nicht möglich ist, folgt aus dem Nichtvorhandensein einer Grenzkurve die Stabilität. Wenn die Gleichung der harmonischen Balance lösbar ist, ist die Gleichgewichtslage nicht stabil.[5]
Literatur
- Otto Föllinger: Nichtlineare Regelungen, Bd. 1: Grundbegriffe, Anwendung der Zustandsebene, direkte Methode. 5. Auflage. Oldenbourg, München 1989, ISBN 3-486-21457-8. (aktuell ist Auflage 8)
Einzelnachweise
Die Einzelnachweise beziehen sich Otto Föllinger, Nichtlineare Regelungen I, 5. Auflage, R. Oldenbourg Verlag München Wien





Wikimedia Foundation.