- Rotation eines Vektorfeldes
-
Die Rotation ist ein Ableitungsoperator, der im dreidimensionalen Raum Vektorfelder ableitet. Handelt es sich um ein Strömungsfeld, so gibt die Rotation für jeden Ort die doppelte Winkelgeschwindigkeit an, mit der ein mitschwimmender Körper rotiert, also wie schnell und um welche Achse er sich dreht. Dieser Zusammenhang ist namensgebend.
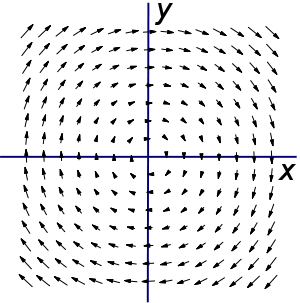 Geschwindigkeitsfeld einer rotierenden Scheibe (ω < 0)
Geschwindigkeitsfeld einer rotierenden Scheibe (ω < 0)Allgemeiner braucht es sich aber nicht um ein Geschwindigkeitsfeld und eine Drehbewegung handeln. Beispielsweise betrifft das Induktionsgesetz die Rotation des elektrischen Feldes.
Ein Vektorfeld, dessen Rotation in einem Gebiet verschwindet, nennt man wirbelfrei oder, insbesondere bei Kraftfeldern, konservativ. Ist das Gebiet einfach zusammenhängend, so ist das Vektorfeld genau dann der Gradient einer Funktion, wenn die Rotation des Vektorfeldes im betrachteten Gebiet verschwindet.
Die Divergenz der Rotation eines Vektorfeldes verschwindet. Umgekehrt ist in einfach zusammenhängenden Gebieten ein Feld, dessen Divergenz verschwindet, die Rotation eines anderen Vektorfeldes.
Beispiele:
- Das Vektorfeld, das an jedem Ort die Windgeschwindigkeit eines Wirbelsturms angibt, hat in der Umgebung des Auges eine von Null verschiedene Rotation.
- Das Vektorfeld
 das an jedem Punkt einer rotierenden Scheibe die Geschwindigkeit angibt, hat an jedem Punkt dieselbe von Null verschiedene Rotation. Die Rotation beträgt das Zweifache der Winkelgeschwindigkeit,
das an jedem Punkt einer rotierenden Scheibe die Geschwindigkeit angibt, hat an jedem Punkt dieselbe von Null verschiedene Rotation. Die Rotation beträgt das Zweifache der Winkelgeschwindigkeit, 
- Das Kraftfeld, das an jedem Punkt die Gravitationskraft der Sonne auf ein Testteilchen angibt, ist wirbelfrei. Das Kraftfeld ist der negative Gradient der potentiellen Energie des Teilchens.
Rotation in kartesischen Koordinaten
Seien (x,y,z) die kartesischen Koordinaten des dreidimensionalen euklidischen Raumes und

 und
und  die normierten, zueinander senkrechten Basisvektoren, die an jedem Punkt in Richtung der zunehmenden Koordinaten zeigen.
die normierten, zueinander senkrechten Basisvektoren, die an jedem Punkt in Richtung der zunehmenden Koordinaten zeigen.Die Rotation eines dreidimensionalen, differenzierbaren Vektorfeldes
ist das dreidimensionale Vektorfeld
Als Merkregel kann man
 als Determinante einer Matrix auffassen, deren erste Spalte die kartesischen Basisvektoren enthält, die zweite die partiellen Ableitungen nach den kartesischen Koordinaten und die dritte die zu differenzierenden Komponentenfunktionen
als Determinante einer Matrix auffassen, deren erste Spalte die kartesischen Basisvektoren enthält, die zweite die partiellen Ableitungen nach den kartesischen Koordinaten und die dritte die zu differenzierenden KomponentenfunktionenAllerdings sind hier die verschiedenen Spalten nicht Vektoren desselben Vektorraumes.
Geben wir die Vektoren als Spaltenvektoren ihrer kartesischen Komponenten an, dann ist
 das Kreuzprodukt des Spaltenvektors der partiellen Ableitungen nach den kartesischen Koordinaten, des Nabla-Operators
das Kreuzprodukt des Spaltenvektors der partiellen Ableitungen nach den kartesischen Koordinaten, des Nabla-Operators  , mit dem Spaltenvektor der kartesischen Komponentenfunktionen
, mit dem Spaltenvektor der kartesischen KomponentenfunktionenRotation in Kugelkoordinaten
Schreibt man das Vektorfeld in Kugelkoordinaten
 als Linearkombination
als Linearkombinationder auf Einheitslänge normierten Vektoren
die an jedem Punkt in Richtung zunehmender
 -Koordinaten zeigen, so ist die Rotation
-Koordinaten zeigen, so ist die RotationRotation in Zylinderkoordinaten
Gibt man das Vektorfeld in Zylinderkoordinaten
 als Linearkombination
als Linearkombinationder Vektoren
an, die auf Einheitslänge normiert an jedem Punkt in Richtung zunehmender
 -Koordinaten zeigen, so ist die Rotation
-Koordinaten zeigen, so ist die RotationAxialvektorfeld
Die Rotation eines Vektorfeldes ist ein Pseudovektorfeld. Ein Vektorfeld geht bei Spiegelung am Ursprung in sein negatives am gespiegelten Ort über, die Rotation des Vektorfeldes ändert bei dieser Spiegelung ihr Vorzeichen nicht,
Vektorfeld in zwei Dimensionen
Ein Vektorfeld im zweidimensionalen, euklidischen Raum kann als Vektorfeld
in drei Dimensionen aufgefasst werden, das nicht von der dritten Koordinate abhängt und dessen dritte Komponente verschwindet. Seine Rotation ist kein Vektorfeld dieser Art, sondern hat eine dritte Komponente,
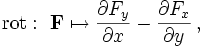
Definiert man in zwei Dimensionen die Rotation als den Differentialoperator
dann ist das Ergebnis eine Funktion, nicht ein Vektorfeld.
Zusammenhang zur Winkelgeschwindigkeit
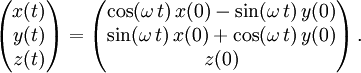
Wir betrachten einfachheitshalber die Drehung eines starren Körpers um die z-Achse mit konstanter Winkelgeschwindigkeit
 Dabei wächst der Drehwinkel
Dabei wächst der Drehwinkel  gleichmäßig mit der Zeit an,
gleichmäßig mit der Zeit an,  und jeder Punkt durchläuft eine Bahn
und jeder Punkt durchläuft eine BahnDie Geschwindigkeit beträgt
Das Geschwindigkeitsfeld einer starren Drehung um die z-Achse ist also, wie oben im Beispiel angegeben,
Seine Rotation ist die doppelte Winkelgeschwindigkeit
Zerlegung in quellen- und wirbelfreien Teil
Zweifach stetig differenzierbare Vektorfelder
 , die mit ihren Ableitungen für große Abstände hinreichend rasch gegen Null gehen, kann man eindeutig in einen wirbelfreien Teil
, die mit ihren Ableitungen für große Abstände hinreichend rasch gegen Null gehen, kann man eindeutig in einen wirbelfreien Teil  und einen quellenfreien Teil
und einen quellenfreien Teil  zerlegen,
zerlegen,Dabei bezeichnen
 die Divergenz und
die Divergenz und  den Gradienten.
den Gradienten.Rechenregeln
Die Rotation ist linear. Für alle Konstanten
 und differenzierbare Vektorfelder
und differenzierbare Vektorfelder  und
und  gilt
giltDie Rotation eines Vektorfeldes verschwindet genau dann, wenn es ein Gradientenfeld ist. Die Divergenz eines Vektorfeldes verschwindet genau dann, wenn es die Rotation eines anderen Feldes ist,
Für differenzierbare Funktionen
 und Vektorfelder und gelten die Produktregeln
und Vektorfelder und gelten die ProduktregelnIntegralsatz von Stokes
Das Integral über eine Fläche
 über die Rotation eines Vektorfeldes
über die Rotation eines Vektorfeldes  ist nach dem Satz von Stokes gleich dem Kurvenintegral über die Randkurve
ist nach dem Satz von Stokes gleich dem Kurvenintegral über die Randkurve  über
über 
Durch das Doppelintegral wird links betont, dass man von einer zweidimensionalen Integration ausgeht. Auf der rechten Seite soll das Kreissymbol im Integralzeichen unterstreichen, dass es sich um ein Integral über einen geschlossenen Weg handelt. Die Orientierung entspricht dabei der sog. „rechte-Hand-Regel“: die folgenden drei Vektoren, nämlich erstens der Vektor
 in Richtung der Flächennormalen, zweitens der Vektor
in Richtung der Flächennormalen, zweitens der Vektor  in Tangentialrichtung und drittens der vom Rand in die Fläche zeigenden Vektor, entsprechen Daumen, Zeigefinger und Mittelfinger der rechten Hand, d.h. sie bilden ein Rechtssystem. Oft schreibt man
in Tangentialrichtung und drittens der vom Rand in die Fläche zeigenden Vektor, entsprechen Daumen, Zeigefinger und Mittelfinger der rechten Hand, d.h. sie bilden ein Rechtssystem. Oft schreibt man  indem man mit
indem man mit  die Richtung der Größe hervorhebt. Das ist für das Folgende wichtig:
die Richtung der Größe hervorhebt. Das ist für das Folgende wichtig:Koordinatenunabhängige Definition der Rotation
Zu dem Integralsatz von Stokes passt die koordinatenunabhängige Definition der Rotation als infinitesimale Flächendichte der Zirkulation (alias „Wirbeldichte“):
Dabei ist
 eine infinitesimale Fläche senkrecht zu
eine infinitesimale Fläche senkrecht zu 
Aus dieser Formel ergibt sich u.a., dass allgemein für krummlinige orthogonale Kooordinaten (z. B. für sphärische oder zylindrische Polarkoordinaten, elliptische oder parabolische Kordinaten u.s.w.) die folgende nützliche Beziehung gilt:
Dabei ist
 mit den orthonormierten Einheitsvektoren
mit den orthonormierten Einheitsvektoren  und den infinitesimalen Längen
und den infinitesimalen Längen  Die zwei anderen Komponenten der Rotation ergeben sich durch zyklische Vertauschung der Indizes, (3,1,2 -> 1,2,3 -> 2,3,1). Die Basisvektoren , die Längenparameter ai und die Vektorkomponenten Ai können von allen drei u-Variablen abhängen.
Die zwei anderen Komponenten der Rotation ergeben sich durch zyklische Vertauschung der Indizes, (3,1,2 -> 1,2,3 -> 2,3,1). Die Basisvektoren , die Längenparameter ai und die Vektorkomponenten Ai können von allen drei u-Variablen abhängen.Literatur
- Adolf J. Schwab: Begriffswelt der Feldtheorie. Springer Verlag, ISBN 3-540-42018-5
Weblinks





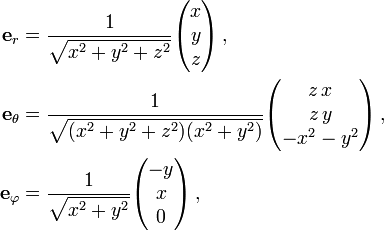
![\begin{align}
\operatorname{rot}\,\mathbf F = \,
&amp;amp;\frac{1}{r \sin \theta} \left[ \frac{\partial}{\partial \theta} \left( F_\varphi \sin \theta \right) - \frac{\partial F_\theta}{\partial \varphi }\right]\mathbf e_r
+
\left [ \frac{1}{r \sin \theta}\frac{\partial F_r}{\partial \varphi} - \frac{1}{r}\frac{\partial}{\partial r} \left( r F_\varphi \right)\right]\mathbf e_\theta \,\,+\\
&amp;amp;+
\frac{1}{r} \left[ \frac{\partial}{\partial r} \left( r F_\theta \right) - \frac{\partial F_r}{\partial \theta} \right] \mathbf e_\varphi
\,.
\end{align}](/pictures/dewiki/99/cfb685aad7558aabc711a64223d4176a.png)

![\begin{align}
\operatorname{rot}\,\mathbf F =
&amp;amp;\left[ \frac 1 r \frac {\partial F_z}{\partial \varphi}
- \frac{\partial F_\varphi}{\partial z}
\right]\mathbf e_r
+\left [
\frac{\partial F_r}{\partial z} - \frac{\partial F_z}{\partial r}
\right ]\mathbf e_\varphi \,+ \\
&amp;amp;+ \frac 1 r \left[
\frac \partial {\partial r} \left( r \cdot F_\varphi \right)
- \frac{\partial F_r}{\partial \varphi} \right]\mathbf e_z\,.
\end{align}](/pictures/dewiki/101/e99a596854cf1b544bb2701dc6e6bf0a.png)















Wikimedia Foundation.