- Zylinderkoordinaten
- Dieser Artikel behandelt Polarkoordinaten der Ebene sowie die eng damit verwandten Zylinderkoordinaten im Raum. Für räumliche Polarkoordinaten siehe den Artikel Kugelkoordinaten.
- Ebene Polarkoordinaten und ihre Transformation in kartesische Koordinaten



- Für r = 0 ist der Winkel φ nicht eindeutig bestimmt, sondern könnte jeden beliebigen reellen Wert annehmen. Zum Zwecke einer eindeutigen Darstellung wird er jedoch häufig mit 0 definiert. Die nachfolgenden Formeln sind deshalb zur Vereinfachung der Darstellung unter der Voraussetzung r ≠ 0 angegeben.
- Für r ≠ 0 ist der Winkel φ nur bis auf ganzzahlige Vielfache von 2π bestimmt, da die Winkel φ und φ + k·2π (für k aus
 ) den gleichen Punkt beschreiben. Zum Zwecke einer eindeutigen Darstellung muss der Winkel φ daher auf ein Intervall der Länge 2π beschränkt werden. Üblicherweise werden dazu je nach Anwendungsgebiet die Intervalle (−π, π] oder [0, 2π) gewählt.
) den gleichen Punkt beschreiben. Zum Zwecke einer eindeutigen Darstellung muss der Winkel φ daher auf ein Intervall der Länge 2π beschränkt werden. Üblicherweise werden dazu je nach Anwendungsgebiet die Intervalle (−π, π] oder [0, 2π) gewählt. 










-







-


- ↑ Richard G. Brown; Andrew M. Gleason (Hrsg.): Advanced Mathematics: Precalculus with Discrete Mathematics and Data Analysis. McDougal Littell, Evanston, Illinois 1997.
- ↑ Michael Friendly: Milestones in the History of Thematic Cartography, Statistical Graphics, and Data Visualization. Abgerufen am 10. September 2006.
- ↑ a b Julian Coolidge: The Origin of Polar Coordinates. In: American Mathematical Monthly. Nr. 59, 1952, S. 78–85 (http://www-history.mcs.st-and.ac.uk/Extras/Coolidge_Polars.html).
- ↑ C. B. Boyer: Newton as an Originator of Polar Coordinates. In: American Mathematical Monthly. Nr. 56, 1949, S. 73–78.
- ↑ Jeff Miller: Earliest Known Uses of Some of the Words of Mathematics. Abgerufen am 10. September 2006.
- ↑ David Eugene Smith: History of Mathematics. 2, Ginn and Co., Boston 1925, S. 324.

In der Mathematik und Geodäsie versteht man unter einem Polarkoordinatensystem (auch: Kreiskoordinatensystem) ein zweidimensionales Koordinatensystem, in dem jeder Punkt auf einer Ebene durch einen Winkel und einen Abstand definiert werden kann. In dem vertrauteren kartesischen oder rechtshändigen Koordinatensystem finden sich derartige Beziehungen in Form trigonometrischer Formulierungen.
Mathematisch ist das Polarkoordinatensystem hilfreich, wenn sich das Verhältnis zwischen zwei Punkten leichter durch Winkel und Abstände beschreiben lässt, als dies mit X- und Y-Koordinaten der Fall wäre. Auf einer allgemeineren Betrachtungsebene stellen Winkel und Abstand hier jeweils eine Generalisierte Koordinate dar. In der Geodäsie sind Polarkoordinaten die häufigste Methode zur Einmessung von Punkten (Polarmethode). In der Funknavigation wird das Prinzip oft als „Rho-Theta“ (für Richtungs- und Distanzmessung) bezeichnet.
In einem zweidimensionalen Koordinatensystem kann jeder Punkt durch zwei Polarkoordinaten beschrieben werden – die Radialkoordinate und die Winkelkoordinate. Die Radialkoordinate (üblicherweise angegeben mit r) bezeichnet den Abstand, den dieser Punkt von einem zentralen Punkt besitzt. Letzterer wird als Pol bezeichnet (gleichbedeutend mit dem Ursprung im Kartesischen System). Die Winkelkoordinate (auch als Polarwinkel oder Azimutwinkel bezeichnet und in der Regel mit θ oder t angegeben) gibt den mathematisch positiven oder linksdrehenden, also gegen den Uhrzeigersinn gedrehten Winkel an, den der Punkt von der 0°-Geraden oder Polarachse ausgehend einnimmt. (Äquivalent zu der positiven X-Achse in der Kartesischen Koordinatenebene).[1]
Geschichte
Die Begriffe Winkel und Radius wurden bereits von den Menschen des Altertums im ersten Jahrtausend vor Christus verwendet. Der griechische Astronom Hipparchos (190-120 v.Chr.) erstellte eine Tafel von trigonometrischen Sehnenfunktionen, um die Länge der Sehne für die einzelnen Winkel zu finden. Mit Hilfe dieser Grundlage war es ihm möglich, die Polarkoordinaten zu nutzen, um damit die Position bestimmter Sterne festlegen zu können. Sein Werk umfasste jedoch ebenso nur einen Teil des Koordinatensystems.[2]
In seiner Abhandlung Über Spiralen beschreibt Archimedes eine Spirallinie mit einer Funktion, deren Radius sich abhängig von seinem Winkel ändert. Die Arbeit des Griechen umfasste jedoch noch kein volles Koordinatensystem.
Es gibt verschiedene Beschreibungen, um das Polarkoordinatensystem als Teil eines formalen Koordinatensystems zu definieren. Die gesamte Historie zu diesem Thema wird in dem Buch Origin of Polar Coordinates (Ursprung der Polarkoordinaten) des Harvard-Professors Julian Coolidge zusammengefasst und erläutert.[3] Demnach führten Grégoire de Saint-Vincent und Bonaventura Cavalieri diese Konzeption unabhängig voneinander in der Mitte des 17. Jahrhunderts ein. Saint-Vincent schrieb im Jahre 1625 auf privater Basis über dieses Thema und veröffentlichte seine Arbeit 1647, während Cavalieri seine Ausarbeitung 1635 verausgabte, wobei eine korrigierte Fassung 1653 erschien. Cavalieri benutzte Polarkoordinaten anfangs, um ein Problem in Bezug auf die Fläche der Archimedischen Spirale zu lösen. Etwas später verwendete Blaise Pascal Polarkoordinaten, um die Länge von parabolischen Winkeln zu berechnen.
In dem Werk Method of Fluxions (Fluxionsmethode) (geschrieben 1671, veröffentlicht 1736) betrachtet Sir Isaac Newton die Transformation zwischen Polarkoordinaten, auf die er sich als "Seventh Manner;For Spirals", (Siebte Methode; Für Spiralen) bezog, und neun anderen Koordinatensystemen.[4]
Es folgte Jacob Bernoulli, der in der Fachzeitschrift Acta Eruditorum (1691) ein System verwendete, dass aus einer Geraden und einem Punkt auf dieser Geraden bestand, die er Polarachse bzw. Pol nannte. Die Koordinaten wurden darin durch den Abstand von dem Pol und dem Winkel zu der Polarachse festgelegt. Bernoullis Arbeit reichte bis zu der Formulierung des Krümmungskreises von Kurven, die er durch die genannten Koordinaten ausdrückte.
Der heute gebräuchliche Begriff Polarkooordinaten wurde von Gregorio Fontana schließlich eingeführt und in italienischen Schriften des 18. Jahrhunderts verwendet. Im folgenden übernahm George Peacock im Jahre 1816 diese Bezeichnung in die englische Sprache, als er die Arbeit von Sylvestre Lacroix Differential and Integral Calculus (Differential und Integralberechnung) in seine Sprache übersetzte.[5][6]
Alexis-Claude Clairaut hingegen war der erste, der über Polarkoordinaten in drei Dimensionen nachdachte, deren Entwicklung jedoch erst dem schweizer Mathematiker Leonhard Euler gelang.[3]
Ebene Polarkoordinaten: Kreiskoordinaten
Die Polarkoordinaten eines Punktes in der euklidischen Ebene werden in Bezug auf einen Koordinatenursprung (einen Punkt der Ebene) und eine Richtung (einen im Koordinatenursprung beginnenden Strahl) angegeben.

Die Koordinate r, eine Länge, wird als Radius, die Winkelkoordinate φ als Azimut bezeichnet.
Umrechnung zwischen Polarkoordinaten und kartesischen Koordinaten
Wenn man ein kartesisches Koordinatensystem mit gleichem Ursprung wie das Polarkoordinatensystem sowie der x-Achse in der Richtung φ = 0 wählt, wie in der oberen linken Abbildung dargestellt, so ergibt sich für den Ortsvektor eines beliebigen Punktes die Darstellung
Umrechnung von Polarkoordinaten in kartesische Koordinaten
Für die Umrechnung von Polarkoordinaten in kartesische Koordinaten gilt demnach:
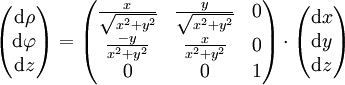
Umrechnung von kartesischen Koordinaten in Polarkoordinaten
Die Umrechnung von kartesischen Koordinaten in Polarkoordinaten ist etwas schwieriger. Zunächst kann der Radius r mit dem Satz des Pythagoras wie folgt berechnet werden:
Bei der Bestimmung des Winkels φ müssen zwei Besonderheiten der Polarkoordinaten berücksichtigt werden:
Berechnung des Winkels im Intervall (−π, π]
Mit Hilfe des Arkustangens kann φ wie folgt im Intervall (−π, π] bestimmt werden:
Einige Programmiersprachen bieten eine bivariate Arkustangens-Funktion atan2(y,x) an, welche die dargestellten Fallunterscheidungen intern berücksichtigt und den korrekten Wert für φ für beliebige Werte von x und y berechnet.
Mit Hilfe des Arkuskosinus kommt man mit nur zwei Fallunterscheidungen aus:
Durch Verwendung der Signum-Funktion kann man eine explizite Fallunterscheidung in der Formel vermeiden:
Durch Ausnutzen der Tatsache, dass in einem Kreis ein Mittelpunktswinkel stets doppelt so groß ist wie der zugehörige Umfangswinkel, kann das Argument auch mit Hilfe der Arkustangens-Funktion mit weniger Fallunterscheidungen berechnet werden:
Berechnung des Winkels im Intervall [0, 2π)
Die Berechnung des Winkels φ' im Intervall [0, 2π) kann im Prinzip so durchgeführt werden, dass der Winkel zunächst wie vorstehend beschrieben im Intervall (−π, π] berechnet wird und dann um 2π vergrößert wird, falls er negativ ist:
Durch Abwandlung der ersten obenstehenden Formel kann φ' wie folgt direkt im Intervall [0, 2π) bestimmt werden:
Die Formel mit dem Arkuskosinus kommt auch in diesem Fall mit nur zwei Fallunterscheidungen aus:
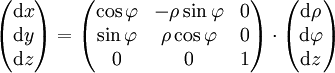
Funktionaldeterminante
Aus den Umrechnungsformeln von Polarkoordinaten in kartesische Koordinaten erhält man für die Funktionaldeterminante als Determinante der Jacobi-Matrix:
Flächenelement
Mit der Funktionaldeterminate ergibt sich für das Flächenelement in Polarkoordinaten:
Linienelement
Aus der obigen Transformationsgleichung
folgen
Für das kartesische Linienelement gilt
wofür in Polarkoordinaten folgt
Geschwindigkeit und Beschleunigung in Polarkoordinaten
Die Geschwindigkeit  ist gegeben durch
ist gegeben durch 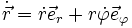
Die Beschleunigung  ist gegeben durch
ist gegeben durch  ,
,
mit den Einheitsvektoren
und
Räumliche Polarkoordinaten: Zylinderkoordinaten und Kugelkoordinaten
Zylinderkoordinaten
Zylinderkoordinaten oder zylindrische Koordinaten sind im Wesentlichen ebene Polarkoordinaten, die um eine dritte Koordinate ergänzt sind. Diese dritte Koordinate beschreibt die Höhe eines Punktes senkrecht über (oder unter) der Ebene des Polarkoordinatensystems und wird im Allgemeinen mit z bezeichnet. Die Koordinate  beschreibt jetzt nicht mehr den Abstand eines Punktes vom Koordinatenursprung, sondern von der z-Achse.
beschreibt jetzt nicht mehr den Abstand eines Punktes vom Koordinatenursprung, sondern von der z-Achse.
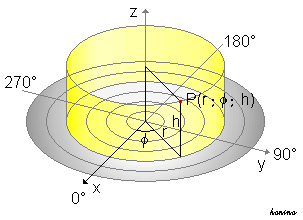
Umrechnung zwischen Zylinderkoordinaten und kartesischen Koordinaten
Wenn man ein kartesisches Koordinatensystem so ausrichtet, dass die z-Achsen zusammenfallen und die x-Achse in Richtung  zeigt, dann ergeben sich die folgenden Umrechnungsformeln:
zeigt, dann ergeben sich die folgenden Umrechnungsformeln:
Für die Umrechnung von kartesischen Koordinaten in Zylinderkoordinaten ergeben sich für  und
und  die gleichen Formeln wie bei den Polarkoordinaten.
die gleichen Formeln wie bei den Polarkoordinaten.
Funktionaldeterminante
Die Hinzunahme der geradlinigen Koordinaten z hat keinen Einfluss auf die Funktionaldeterminante:
Folglich ergibt sich für das Volumenelement dV:
Das entspricht auch der Quadratwurzel des Betrags der Determinante des metrischen Tensors, mit dessen Hilfe die Koordinatentransformation berechnet werden kann (siehe dazu Laplace-Beltrami-Operator).
Vektoranalysis
Die folgenden Darstellungen des Nabla-Operators können in der gegebenen Form direkt auf Skalare- oder Vektorwertige Felder in Zylinderkoordinaten angewendet werden. Man verfährt hierbei analog zur Vektoranalysis in kartesischen Koordinaten.
Gradient
Die Darstellung des Gradienten überträgt sich wie folgt von kartesischen in Zylinderkoordinaten:
Divergenz
Bei der Divergenz kommen noch weitere Terme hinzu welche sich aus den Ableitungen der von ρ, und z abhängigen Einheitsvektoren ergeben:
Rotation
Kugelkoordinaten
Siehe Hauptartikel: Kugelkoordinaten
Kugelkoordinaten sind im Wesentlichen ebene Polarkoordinaten, die um eine dritte Koordinate ergänzt sind, und zwar in der gleichen Art und Weise, nämlich indem man einen Winkel ![\theta \in [0,\pi]](/pictures/dewiki/49/1b98c8d3d657d452f7a2a09caf0d00fb.png) für die dritte Achse spezifiziert. Diese dritte Koordinate beschreibt den Winkel zwischen dem Vektor
für die dritte Achse spezifiziert. Diese dritte Koordinate beschreibt den Winkel zwischen dem Vektor  zum Punkt P und der z-Achse. θ ist genau dann null, wenn P in der z-Achse liegt.
zum Punkt P und der z-Achse. θ ist genau dann null, wenn P in der z-Achse liegt.

n-dimensionale Polarkoordinaten
Es lässt sich auch eine Verallgemeinerung der Polarkoordinaten für einen n-dimensionalen Raum mit kartesischen Koordinaten  für
für  angeben. Dazu führt man für jede neue Dimension einen weiteren Winkel
angeben. Dazu führt man für jede neue Dimension einen weiteren Winkel  ein, der den Winkel zwischen dem Vektor
ein, der den Winkel zwischen dem Vektor  und der Koordinate xi + 2 angibt.
und der Koordinate xi + 2 angibt.
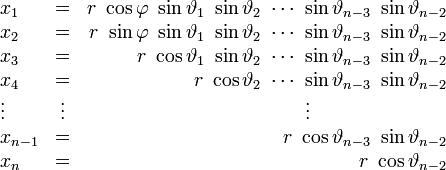
Umrechnung in kartesische Koordinaten
Eine Umrechnungsvorschrift von diesen Koordinaten in kartesische Koordinaten wäre dann:
Wie man nachweisen kann, gehen diese Polarkoordinaten für den Fall n=2 in die gewöhnlichen Polarkoordinaten und für n=3 in die Kugelkoordinaten über.
Funktionaldeterminante
Die Funktionaldeterminante der Transformation von Polarkoordinaten in kartesische Koordinaten beträgt:
Damit beträgt das n-dimensionale Volumenelement:
Weblinks
Einzelnachweise
Wikimedia Foundation.