- B-Spline
-
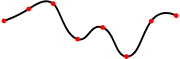 Beispiel eines Splines mit 8 Knoten
Beispiel eines Splines mit 8 Knoten Geflecht: Die Querstreben verhalten sich theoretisch wie Splines
Geflecht: Die Querstreben verhalten sich theoretisch wie SplinesEin Spline n-ten Grades ist eine Funktion, die stückweise aus Polynomen mit maximalem Grad n zusammengesetzt ist. Dabei werden an den Stellen, an denen zwei Polynomstücke zusammenstoßen (man spricht auch von Knoten) bestimmte Bedingungen gestellt, etwa dass der Spline (n-1) mal stetig differenzierbar ist.
Handelt es sich bei dem Spline um eine stückweise lineare Funktion, so nennt man den Spline linear (es handelt sich dann um einen Polygonzug), analog gibt es quadratische, kubische usw. Splines.
Inhaltsverzeichnis
Allgemeines
Splines wurden zuerst in einer Veröffentlichung von Isaac Jacob Schoenberg im Jahr 1946 erwähnt.
Splines werden vor allem zur Interpolation und Approximation benutzt. Durch die stückweise Definition sind Splines flexibler als Polynome und dennoch relativ einfach und glatt. Dadurch ergeben sich bei der Spline-Interpolation nicht die Nachteile, die durch die starke Oszillation von Polynomen höheren Grades und deren Unbeschränktheit bei der Polynominterpolation entstehen. Splines lassen sich auch gut benutzen, um Kurven darzustellen. Hier finden sie Einsatz im CAD. Mathematisch analog lassen sich auf beide Weisen nicht nur Kurven, sondern auch Flächen beschreiben.
Wortherkunft: Der Begriff stammt aus dem Schiffbau: eine lange dünne Latte (Straklatte, englisch spline), die an einzelnen Punkten durch Molche fixiert wird, biegt sich genau wie ein kubischer Spline mit natürlicher Randbedingung. Die Straklatte ist dabei bestrebt, ihre durch die Biegungen hervorgerufene innere Spannung zu minimieren bzw. zu verteilen.
Kubische Splines
- Siehe auch Kubischer C2-Spline und Bikubische Filterung.
Kubische Splines werden unter anderem zur Berechnung des Bahnverlaufes bei Achterbahnen verwendet, um die Beschleunigungen auf die Fahrgäste zu minimieren. Kubische Splines finden weitere Anwendung bei der exakten Verlegung der Schienen bei Hochgeschwindigkeitsstrecken der Eisenbahn. Auch beim Entwurf von Kurven und Oberflächen (sogen. "Freiformkurven und -flächen"), wie sie häufig im Schiff-, Flugzeug- und Automobilbau vorkommen, sind Splines von Bedeutung.
Die Eignung von Splines für solche Anwendungen liegt daran, dass für jeden Polynomabschnitt Randbedingungen erstens in Form von Punkten aber auch in Form von Werten für erste und zweite Ableitung (und in Abhängigkeit davon Steigung und Krümmung/Kurvenradius) vorgeben lassen. Dadurch kann erreicht werden, dass die Krümmung entlang der Kurve immer stetig ist. Das hat den Vorteil, dass Querbeschleunigungen beim Abfahren der Kurve immer allmählich aufgebaut werden bzw. an den Knotenpunkten vorgegebene Werte einhalten.
B-Splines
Wie auch der Raum der Polynome ist der Raum der stückweisen Polynome ein Vektorraum und hat eine Basis. Im Kontext numerischer Verfahren, wo Splines häufig eingesetzt werden, ist die Wahl der Basis entscheidend für eventuelle Rundungsfehler und damit für die praktische Einsetzbarkeit. Eine bestimmte Basis hat sich hier als am besten geeignet herausgestellt: sie ist numerisch stabil und erlaubt die Berechnung von Werten der Spline-Funktion mittels einer Drei-Term-Rekursion. Diese so genannten B-Spline-Basisfunktionen haben einen kompakten Träger, sie sind nur auf einem kleinen Intervall von Null verschieden. Änderungen der Koeffizienten wirken sich also nur lokal aus. Splines, die in dieser Basis dargestellt werden, nennt man B-Splines.
- Siehe auch: Faltung (Mathematik)
Definition
Die B-Spline-Basisfunktionen
 der Ordnung p mit Knotenvektor
der Ordnung p mit Knotenvektor  werden durch die Rekursionsformel von de Boor/Cox/Mansfield definiert:
werden durch die Rekursionsformel von de Boor/Cox/Mansfield definiert:und
 .
.
Die Elemente des Knotenvektors heißen auch Knotenpunkte (im engl. breakpoints) und müssen die Bedingungen
 und τi < τi + p erfüllen. Die Ordnung p einer B-Spline-Basisfunktion gibt dabei die Anzahl der Koeffizienten für jedes stückweise definierte Polynom innerhalb einer Basis an. Sie ist um eins höher als der Grad der verwendeten Polynome.
und τi < τi + p erfüllen. Die Ordnung p einer B-Spline-Basisfunktion gibt dabei die Anzahl der Koeffizienten für jedes stückweise definierte Polynom innerhalb einer Basis an. Sie ist um eins höher als der Grad der verwendeten Polynome.Im CAD werden fast immer die ersten p und letzten p Knotenpunkte auf den gleichen Wert gesetzt.
Eigenschaften:
- Nicht-Negativität:
- Lokaler Träger:

- Zerlegung der Eins:
 für
für 
Bemerkung:
Die Bedingungen an die Knotenpunkte τi erlauben es, dass in der Rekursionsformel unter Umständen 0 als Nenner auftritt (nämlich wenn τi + p = τi bzw. τi + p + 1 = τi + 1 gilt). Allerdings ist dann die Funktion Ni,p,τ bzw. Ni + 1,p,τ automatisch die Nullfunktion. Auf die entsprechende Fallunterscheidung wird hier verzichtet, man ignoriere die entsprechenden Summanden in diesen Fällen (ersetze sie durch 0). Dies entspricht auch dem Grenzverhalten für z. B.
 .
.B-Spline-Kurve
Eine Spline-Kurve, deren Darstellung auf B-Splines beruht, nennt man B-Spline-Kurve. Bestimmt wird die Kurve durch so genannte De-Boor-Punkte, mit denen sich das Aussehen der Kurve leicht steuern lässt: Die Kurve liegt immer in der konvexen Hülle der De-Boor-Punkte, wird also von ihnen eingeschlossen.
Eine B-Spline-Kurve
![C(u),\ u\in [\tau_{p},\tau_{n-p+1}]](/pictures/dewiki/98/b6617ad5aed38e256b8e11160adfaea2.png) der Ordnung p mit Knotenvektor τ (s. o.) und Kontrollpunkten
der Ordnung p mit Knotenvektor τ (s. o.) und Kontrollpunkten  (auch De-Boor-Punkte genannt) wird definiert durch
(auch De-Boor-Punkte genannt) wird definiert durch .
.
Für Kurven in der Ebene sind die Kontrollpunkte 2-dimensional, für Kurven im Raum 3-dimensional.
Eigenschaften:
- Lokalität: Der Kontrollpunkt Pi beeinflusst die Kurve nur im Intervall [τi,τi + p]
- Endpunkt-Interpolation: Es ist P1 = C(τp), falls der erste Knotenpunkt p-mal wiederholt wird und Pn − p = C(τn − p + 1), falls der letzte Knotenpunkt p-mal wiederholt wird.
Eine ähnliche Darstellung haben Bézier-Kurven. Diese basieren nicht auf der oben genannten Basis, sondern auf den Bernsteinpolynomen. Genau wie bei B-Spline-Kurven die De-Boor-Punkte gibt es hier die Bézier-Punkte, die das so genannte Kontrollpolygon bilden und mit denen man die Kurve leicht graphisch darstellen kann.
B-Spline-Fläche
Eine B-Spline-Fläche der Ordnung p und q mit Knotenvektor
 und
und  und Kontrollpunkten (bzw. De Boor Punkten) Pij wird definiert durch
und Kontrollpunkten (bzw. De Boor Punkten) Pij wird definiert durchDie Fläche ist definiert über dem Rechteck
![[\tau_{p},\tau_{n-p+1}] \times [\mu_{q},\mu_{m-q+1}]](/pictures/dewiki/51/33b67a989da5882210a2b54e3b7b48d7.png) .
.Eigenschaften:
- Lokalität: Der Kontrollpunkt Pij beeinflusst die Fläche nur im Rechteck
![[\tau_{i},\tau_{i+p}]\times [\mu_{j},\mu_{j+q}]](/pictures/dewiki/54/6e628a83c10fa4742a9988f4cc242976.png)
- Endpunktinterpolation: Werden die ersten p Knotenpunkte in τ auf den gleichen Wert gesetzt, die letzten p Knotenpunkte in τ auf den gleichen Wert gesetzt, die ersten q Knotenpunkte in μ auf den gleichen Wert gesetzt und die letzten q Knotenpunkte in μ auf den gleichen Wert gesetzt, dann gilt die Endpunktinterpolation, d. h. P1,1 = C(τp,μq), P1,m − q = C(τp,μm − q + 1), Pn − p,1 = C(τn − p + 1,μq) und Pn − p,m − q = C(τn − p + 1,μm − q + 1)
Literatur
- Carl de Boor: A practical guide to splines. Springer Verlag, New York 1978 ISBN 0-387-90356-9 und ISBN 3-540-90356-9 (Rev. Aufl. von 2001 ISBN 0-387-95366-3)
- Gerald Farin: Curves and Surfaces for CAGD. A practical guide. 5. Aufl. Academic Press, San Diego 2002 ISBN 1-55860-737-4
- Günther Nürnberger: "Approximation by Spline Functions", Springer Verlag, 1989, ISBN 3-540-51618-2 und ISBN 0-387-51618-2
- Hartmut Prautzsch, Wolfgang Böhm, Marco Paluszny: Bezier and B-Spline Techniques. Springer Verlag, Berlin 2001 ISBN 3-540-43761-4
- David Salomon: Curves and Surfaces for Computer Graphics. 2006 Springer Science+Business Media, Inc.; ISBN 0-387-24196-5
- Isaac Jacob Schoenberg: Contributions to the problem of approximation of equidistant data by analytic functions. Quart. Appl. Math., vol. 4, S. 45–99 und 112–141, 1946.
Weblinks



Wikimedia Foundation.