- Kugelkoordinate
-
In räumlichen Polarkoordinaten wird ein Punkt durch seinen Abstand vom Ursprung und durch zwei Winkel angegeben. Wenn der Abstand vom Ursprung konstant ist (auf einer Sphäre = Kugeloberfläche), benötigt man nur die zwei Winkel, um einen Punkt eindeutig zu bezeichnen, und spricht dann von sphärischen Koordinaten. Der Begriff Kugelkoordinaten kann als Oberbegriff für diese beiden Fälle angesehen werden.
Für Polarkoordinaten in der Ebene (ein Abstand, ein Winkel) und Zylinderkoordinaten (zwei Abstände, ein Winkel) siehe den Artikel Polarkoordinaten.
Inhaltsverzeichnis
Übliche Konvention
Die Abbildung zeigt einen Punkt P mit den kartesischen Koordinaten (x, y, z) und den Kugelkoordinaten (r, Φ, θ):
-
-
 Aufbau der Kugelkoordinaten
Aufbau der Kugelkoordinaten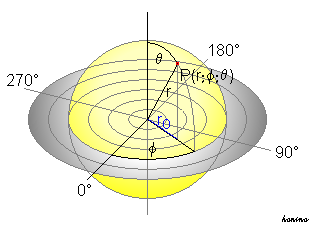
-
- (die x-Achse zeigt in 0°-, die y-Achse in 90°-Richtung, die z-Achse verläuft orthogonal zu den beiden anderen Achsen durch den Ursprung nach oben).
Die Transformationsgleichungen von kartesischen in Kugelkoordinaten lauten
In der Analysis und ihren Anwendungen werden Kugelkoordinaten (im allg. alle Winkel) stets im Bogenmaß angegeben; deshalb steht in der Fallunterscheidung für φ nicht 360°, sondern 2π.
Um die anschauliche Bedeutung der Kugelkoordinaten verbal zu erklären, sei r der Ortsvektor von P (also der Vektor, der den Koordinatenursprung O mit P verbindet) und rxy die Projektion von r in die x-y-Ebene. Dann haben die Kugelkoordinaten von P folgende Bedeutung:
- r (Radius) ist der Abstand des Punktes P vom Koordinatenursprung O, also die Länge des Vektors r;
- Φ bzw.
 [1] (Azimutwinkel[2]) ist der Winkel zwischen der positiven x-Achse und rxy, gezählt von 0 bis 2π (0° bis 360°) gegen den Uhrzeigersinn.
[1] (Azimutwinkel[2]) ist der Winkel zwischen der positiven x-Achse und rxy, gezählt von 0 bis 2π (0° bis 360°) gegen den Uhrzeigersinn. - θ bzw.
 [1] (Polarwinkel[2]) ist der Winkel zwischen der positiven z-Achse und r, gezählt von 0 bis π (0° bis 180°)
[1] (Polarwinkel[2]) ist der Winkel zwischen der positiven z-Achse und r, gezählt von 0 bis π (0° bis 180°)
Die Rücktransformation erfolgt nach den Gleichungen (Parametrisierung)


 .
.
Die Einheitsvektoren der sphärischen Koordinaten lauten damit:
Tipp: Um diese Einheitsvektoren zu erhalten, muss die Parametrisierung nach der jeweiligen Koordinate (hier
 ) abgeleitet werden und dann noch auf 1 normiert werden.
) abgeleitet werden und dann noch auf 1 normiert werden.Andere Konventionen
Die obige Koordinatenwahl ist internationaler Konsens in der theoretischen Physik. Manchmal werden die Zeichen θ und φ gerade im umgekehrten Sinne verwendet, insbesondere in amerikanischer Literatur.
Der Polarwinkel θ ist nicht die geographische Breite. Diese ist vielmehr als Winkel zwischen der Äquatorialebene und dem Ortsvektor definiert und nimmt Werte zwischen −90° und 90° an. Wird sie mit φ bezeichnet, so ist φ = 90° − θ, θ = 90° − φ. Hingegen kann man das oben benutzte φ ohne weiteres mit der geographischen Länge λ östlich von Greenwich gleichsetzen. Siehe dazu den Artikel: geographische Koordinaten.
Des Weiteren ist die obige Konstruktion in gewisser Hinsicht inkonsistent zum Aufbau der ebenen Polarkoordinaten. Für manche Probleme ist es praktischer, die Darstellung


 .
.
zu benutzen. In dieser Darstellung entspricht θ der geographischen Breite.
Transformation von Differentialen
Jacobi-Matrix
Die lokalen Eigenschaften der Koordinatentransformation werden durch die Jacobi-Matrix beschrieben. Für die Transformation von Kugelkoordinaten in kartesische Koordinaten lautet diese
bei sphärischen Polarkoordinaten (nur θ, φ) fällt die erste Spalte weg.
Die Jacobi-Matrix der entgegengesetzten Transformation ist nur für räumliche, nicht für sphärische Polarkoordinaten definiert; man berechnet sie am einfachsten als Inverse von J:
Einige Komponenten dieser Matrix sind Brüche, an deren Nennern man die Uneindeutigkeit der Polarkoordinaten bei r=0 und bei sin θ=0 (also θ=0 oder π) erkennt. Ungebräuchlicher ist die Darstellung in kartesischen Koordinaten:
Differentiale, Volumenelement, Linienelement
Die Jacobi-Matrix erlaubt es, die Umrechnung von Differentialen übersichtlich als lineare Abbildung zu schreiben:
beziehungsweise
 .
.
Das bedeutet eine Koordinatentransformation
 gegeben durch die Jacobi-Matrix, und zwar hier von kartesischer zu sphärischer Symmetrie. Dabei sind die Komponenten
gegeben durch die Jacobi-Matrix, und zwar hier von kartesischer zu sphärischer Symmetrie. Dabei sind die Komponenten  in
in  Elemente des zu
Elemente des zu  dualen (Tangential-)Raums (d. h. im Prinzip
dualen (Tangential-)Raums (d. h. im Prinzip  ). Dieser Koordinatenwechsel spielt auch eine Rolle bei der Parametrisierung einer Kurve für Kurvenintegrale.
). Dieser Koordinatenwechsel spielt auch eine Rolle bei der Parametrisierung einer Kurve für Kurvenintegrale.Das Volumenelement
 lässt sich besonders einfach mit Hilfe der Funktionaldeterminante
lässt sich besonders einfach mit Hilfe der Funktionaldeterminante- | J | = r2sinθ
umrechnen:
 .
.
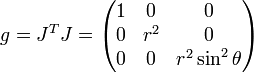
Hier gilt
 (mit
(mit  als Determinante des metrischen Tensors) sodass man gleich sieht, dass:
als Determinante des metrischen Tensors) sodass man gleich sieht, dass: .
.
Das spielt eine Rolle im Falle einer Verallgemeinerung im Sinne allgemeiner Skalarprodukte und z. B. des Laplace-Beltrami-Operators (g aus dem allgemeinen Skalarproduktes beinhaltend).
Durch Differentiation dV/dr erhält man für ein Flächenelement dA auf einer Sphäre mit Radius r
 .
.
Ein Linienelement ds rechnet man gemäß
um (mit i,j=1 bis 3). Dabei sind
 die Komponenten des metrischen Tensors, der die Multiplikation in nichttrivialen Räumen definiert (kartesisch gilt
die Komponenten des metrischen Tensors, der die Multiplikation in nichttrivialen Räumen definiert (kartesisch gilt  ), beziehungsweise benutzt wird, um Indizes zu heben und zu senken, d. h. kovariante Tensoren in Kontravarianten und umgekehrt zu transformieren, sodass
), beziehungsweise benutzt wird, um Indizes zu heben und zu senken, d. h. kovariante Tensoren in Kontravarianten und umgekehrt zu transformieren, sodass  , bzw.
, bzw.  eine besonders große Rolle in der allgemeinen und in der speziellen Relativitätstheorie, d.h im Standardmodell der Kosmologie und der Elementarteilchen, spielten.
eine besonders große Rolle in der allgemeinen und in der speziellen Relativitätstheorie, d.h im Standardmodell der Kosmologie und der Elementarteilchen, spielten.Metrik und Rotationsmatrix
Im Fehlen gemischter Glieder im Linienelement ds spiegelt sich wider, dass der metrische Tensor
auch in Kugelkoordinaten keine Außerdiagonalelemente hat.
Der metrische Tensor ist offensichtlich das Quadrat der Diagonalmatrix
 .
.
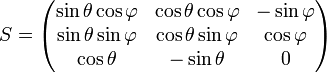
Mit Hilfe dieser Matrix lässt sich die Jacobi-Matrix als J=Sh schreiben, wobei S die Rotationsmatrix
ist.
Transformation von Vektorfeldern und -Operatoren
Im Folgenden soll die Transformation von Vektoren und Differentialoperatoren exemplarisch hergeleitet werden. Die Ergebnisse werden bevorzugt in kompakter Form unter Benutzung von Transformationsmatrizen geschrieben.
Transformation der Vektorraumbasis
Der Basisvektor eφ zur Koordinate φ gibt an, in welche Richtung sich ein Punkt P(r, θ, φ) (oft auch Event genannt) bewegt, wenn die Koordinate φ um einen infinitesimalen Betrag dφ verändert wird:
 .
.
Daraus erhält man
 .
.
Um eine orthonormale Basis zu erhalten, muss eφ noch auf die Länge 1 normiert werden:
 .
.
In ähnlicher Weise erhält man die Basisvektoren er und eθ. Um die folgenden Transformationen in kompakter Form zu schreiben, verwenden wir die oben eingeführte Rotationsmatrix S. Diese Matrix ist orthogonal, das heißt, S-1=ST. Die normierten Basisvektoren des Kugelkoordinatensystems kann man dann zusammengefasst so mitteilen:
 .
.
Entsprechend lautet die Transformation in die Gegenrichtung
 .
.
Transformation eines Vektorfeldes
Ein Vektor, als ein geometrisches Objekt, muss vom Koordinatensystem unabhängig sein:
Diese Bedingung wird erfüllt durch
beziehungsweise
 .
.
Transformation der partiellen Ableitungen
Die partiellen Ableitungen transformieren sich wie die Basisvektoren, aber ohne Normierung. Man kann genau wie oben rechnen, nur lässt man den Punkt P im Zähler weg (tatsächlich werden in der modernen Formulierung der Differentialgeometrie die Einheitsvektoren des Tangentialraums und die partiellen Ableitungen gleichgesetzt) und verwendet die Jacobi-Matrix J=Sh anstelle der Rotationsmatrix S. Die Transformation lautet also:
 ,
,
und in die Gegenrichtung
 .
.
Transformation des Nabla-Operators
Der Nabla-Operator
 hat nur in kartesischen Koordinaten die einfache Form
hat nur in kartesischen Koordinaten die einfache Form .
.
Sowohl die partiellen Ableitungen als auch die Einheitsvektoren muss man in der oben hergeleiteten Weise transformieren. Man findet:
 .
.
In dieser Form kann der transformierte Nabla-Operator unmittelbar angewandt werden, um den Gradienten eines in Kugelkoordinaten gegebenen Skalarfeldes zu berechnen.
Um die Divergenz eines in Kugelkoordinaten gegebenen Vektorfeldes A zu berechnen, ist hingegen zu berücksichtigen, dass
nicht nur auf die Koeffizienten Ar, … wirkt, sondern auch auf die in A implizit enthaltenen Basisvektoren erUm die Rotation eines in Kugelkoordinaten gegebenen Vektorfeldes A zu berechnen, ist selbiges zu berücksichtigen:
Transformation des Laplace-Operators
Wenn man in der Divergenzformel als Vektorfeld A den Gradientenoperator
einsetzt, findet man den Laplace-Operator .
.
bzw.
 .
.
Eine besonders einfache Form um diese Form des Laplace-Operators herzuleiten ergibt sich mit Hilfe der Formel für den Laplace-Beltrami-Operator. Dabei gilt:

 .
.
Dabei gilt , also
, also  .
.Der Laplace-Beltrami-Operator ist dann genauso definiert wie der gewöhnliche Laplace-Operator, gilt aber für allgemeinere riemannsche Mannigfaltigkeiten:
 .
.
Der metrische Tensor in Kugelkoordinaten ist diagonal und von der Form
 .
.
Somit entfällt die Summe über i und die gij sind die Kehrwerte der Komponenten des metrischen Tensors, also
 und
und 
Die Wurzel des Betrags der Determinante ist
 , also gleich der Jacobi-Determinante.
, also gleich der Jacobi-Determinante.Setzt man die verschiedenen Größen in die Formel des Laplace-Beltrami-Operators ein, dann ergibt sich


 .
.
Addiert man zu Δf = (Δf)(1) + (Δf)(2) + (Δf)(3), so ergibt sich die obige Formel für den Laplace-Operator in Kugelkoordinaten.
Siehe auch
- Formelsammlung Nabla-Operator für weitere Identitäten.
Quellen
- ↑ a b Lothar Papula: Mathematik für Ingenieure und Naturwissenschaftler Band 3, 4. Auflage, ISBN 3-528-34937-9
- ↑ a b Skript an der TU München
Weblinks
- Matroids Matheplanet: Einführung in die Vektoranalysis (als PDF) von Eckard Specht
- Laplace-Operator in Kugelkoordinaten: Theoretische Physik
-

![{\phi}=\begin{cases}\arccos\frac{x}{\sqrt{x^2+y^2}} & \mathrm{f\ddot ur}\ y\geq0, \\[,5em] 2\pi-\arccos\frac x{\sqrt{x^2+y^2}} & \mathrm{f\ddot ur}\ y < 0;\end{cases}](/pictures/dewiki/52/44fb21bf014ca0a37c1f6c40b23f2408.png)










Wikimedia Foundation.