- Beobachter (Regelungstechnik)
-
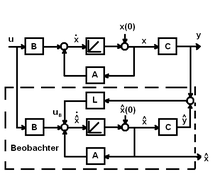
 Beobachter (Systemmodell) und Regelstrecke (beobachtetes reales Referenzsystem)
Beobachter (Systemmodell) und Regelstrecke (beobachtetes reales Referenzsystem)
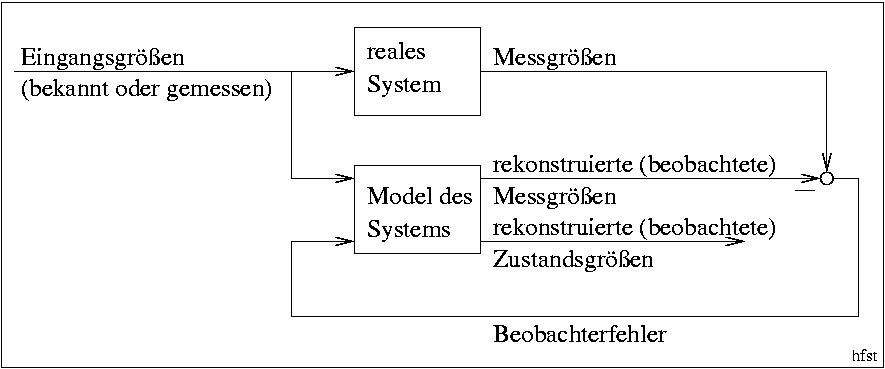
Ein Beobachter in der Regelungstechnik ist ein System, das aus bekannten Eingangsgrößen (z.B. Stellgrößen oder messbaren Störgrößen) und Ausgangsgrößen (Messgrößen) eines beobachteten Referenzsystems nicht messbare Größen (Zustände) rekonstruiert. Dazu bildet er das beobachtete Referenzsystem als Modell nach und beinhaltet einen Regler, der die messbaren Zustandsgrößen nachführt. Treffender wäre es, von einem referenzgeregelten Synthetisierer (engl. reference conrolled synthesizer) zu sprechen.
Ein Beobachter kann nur dann entworfen werden, wenn das Referenzsystem über die vorhandenen Messgrößen beobachtbar ist. Daher ist die Feststellung der Beobachtbarkeit anhand von Kriterien notwendige Voraussetzung für den Beobachterentwurf.
Eingesetzt werden Beobachter einerseits bei Zustandsreglern zur Rekonstruktion nicht messbarer Zustandsgrößen, anderseits in der Messtechnik als Ersatz technisch oder wirtschaftlich nicht möglicher Messungen.
Eine durchgängige Theorie wurde ab 1964 von dem amerikanischen Regelungstechniker David Luenberger für lineare Systemmodelle und eine konstante proportionale Rückführung des Fehlers entwickelt. Das Verfahren kann prinzipiell auf nichtlineare Modelle erweitert werden.[FOE:NL2 1]
Beobachter werden heutzutage (2009) als Rechnerprogramme realisiert.
Inhaltsverzeichnis
Luenberger-Beobachter
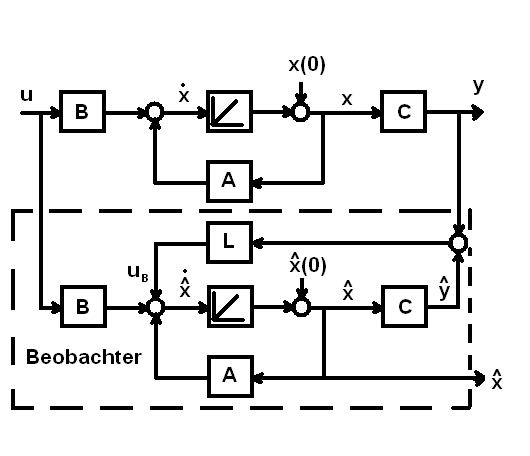
 Blockdiagramm Luenberger-Beobachter :Fehlerbehebung: Der Eingang von L muss als
Blockdiagramm Luenberger-Beobachter :Fehlerbehebung: Der Eingang von L muss als gebildet werden.
gebildet werden.Die Idee von Luenberger 1964 beruht auf einer Parallelschaltung des Beobachters zum Regelstreckenmodell[LUN:RT2 1]. Dabei wird die Differenz zwischen dem Messwert der Strecke und dem "Messwert" des Beobachters, also
 auf das Modell zurückgeführt. Damit kann der Beobachter auf Störungen beziehungsweise eigene Ungenauigkeiten reagieren. Die grundsätzliche Gleichung des Beobachters ist:
auf das Modell zurückgeführt. Damit kann der Beobachter auf Störungen beziehungsweise eigene Ungenauigkeiten reagieren. Die grundsätzliche Gleichung des Beobachters ist: mit
mit 

dabei bestimmt sich
somit ergibt sich für den Beobachter
Für den Beobachtungsfehler
 eines Luenberger-Beobachters gilt daher
eines Luenberger-Beobachters gilt daher  , wenn alle Eigenwerte der Matrix
, wenn alle Eigenwerte der Matrix  negative Realteile besitzen.
negative Realteile besitzen.Die Bestimmung der Rückführung erfolgt analog zum Reglerentwurf durch Polvorgabe indem folgende Ersetzungen vorgenommen werden[FOE:RT 1]:
 statt
statt 
 statt
statt 
 statt
statt 
Das Beispielsystem hat die Eigenwerte e1 = − 2 und e2 = − 4. Damit der Beobachter dem System folgen kann, müssen dessen Eigenwerte links von denen des Systems liegen. Diese Forderung ist für λ1,2 = − 8 erfüllt. Die charakteristische Gleichung lautet in diesem Fall
und damit aB0 = 64 und aB1 = 16. Die Rückführmatrix ist damit
 .
.
Für den vollständigen Beobachter lautet die Differenzialgleichung
 .
.
Strukturelle Beobachtbarkeit[LUN:RT2 2]
Systeme können aus zwei Gründen nicht beobachtbar sein:
- Eine konkrete Parameterkombination führt zur Nichtbeobachtbarkeit.
- Die Struktur des Systems führt dazu, dass das System bei beliebiger Besetzung der Nichtnullelemente der Systemmatrix (die in der Praxis von physikalischen Parametern abhängen) nicht beobachtbar bzw. bei keiner Parameterkombination beobachtbar ist. Dies ist der Fall, wenn notwendige Signalkoppelungen zwischen Zustands- und Messgrößen fehlen. Um nachzuweisen, dass ein System strukturell nicht beobachtbar ist, müssen graphentheoretische Verfahren eingesetzt werden.
Die strukturelle Beobachtbarkeit dagegen ist leicht nachzuweisen, wenn gezeigt werden kann, dass eine bestimmte Parameterkombination (beispielsweise alle Nichtnullelemente == 1) ein vollständig beobachtbares System beschreibt.
Vollständige Beobachtbarkeit
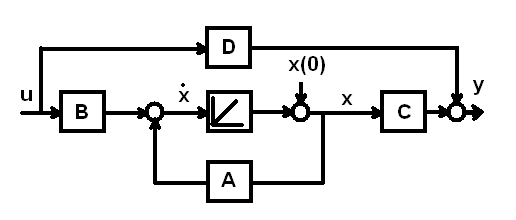
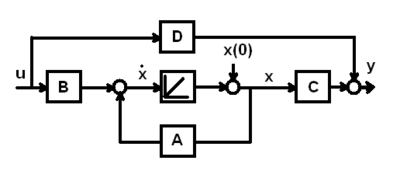 Blockdiagramm Zustandsraumdarstellung
Blockdiagramm ZustandsraumdarstellungDie Zustandsraumdarstellung eines linearen Systems lautet

 .
.
Das System ist beobachtbar, wenn bei bekannter Steuerfunktion
 und bekannten Matrizen und
und bekannten Matrizen und  aus dem Verlauf des Ausgangsvektors
aus dem Verlauf des Ausgangsvektors  über ein endliches Zeitintervall
über ein endliches Zeitintervall  der Anfangszustand
der Anfangszustand  eindeutig bestimmt werden kann.
eindeutig bestimmt werden kann.Im folgenden wird als Beispiel ein System mit einem Eingang
 und einem Ausgang
und einem Ausgang  (SISO: Single Input, Single Output) verwendet.
(SISO: Single Input, Single Output) verwendet.Es beschreibt die Reihenschaltung von zwei PT1-Gliedern mit den Zeitkonstanten T1 = 0,5 und T2 = 0,25.
Nachweis
Strukturelle Beobachtbarkeit ist eine notwendige Bedingung für die vollständige Steuerbarkeit. Jedoch werden zumeist nur die folgenden Kriterien genutzt, um eine vollständige Beobachtbarkeit nachzuweisen.
Das Kriterium nach Kalman ist relativ einfach zu bestimmen, jedoch kann man dabei die Beobachtbarkeit nicht auf einzelne Eigenvorgänge beziehungsweise Eigenwerte beziehen. Dies kann mit Hilfe des Gilbert- und des Hautus-Kriteriums geschehen.
Kriterium von Kalman
Das System (A,C) ist genau dann nach Kalman vollständig beobachtbar[LUN:RT2 3], wenn die Beobachtbarkeitsmatrix SB den Rang n hat bzw. deren Determinante im Falle nur einer Messgröße ungleich 0 ist:
 mit
mit
Für das Beispielsystem gilt
und
mit der Beobachtbarkeitsmatrix
 .
.
Es gilt
 und damit ist der Rang gleich 2. Das System ist vollständig beobachtbar.
und damit ist der Rang gleich 2. Das System ist vollständig beobachtbar.Kriterium von Gilbert
Wenn das Modell in kanonischer Normalform (Jordansche Normalform)
mit
und
 als Matrix der Eigenvektoren vorliegt, gilt das Kriterium von Gilbert[LUN:RT2 4]:
als Matrix der Eigenvektoren vorliegt, gilt das Kriterium von Gilbert[LUN:RT2 4]:Ein System
 , dessen Zustandsraummodell in kanonischer Normalform vorliegt, ist genau dann vollständig beobachtbar, wenn die Matrix
, dessen Zustandsraummodell in kanonischer Normalform vorliegt, ist genau dann vollständig beobachtbar, wenn die Matrix  keine Nullspalte besitzt und wenn die p Spalten
keine Nullspalte besitzt und wenn die p Spalten  , der Matrix , die zu den kanonischen Zustandsvariablen eines p-fachen Eigenwerts gehören, linear unabhängig sind.
, der Matrix , die zu den kanonischen Zustandsvariablen eines p-fachen Eigenwerts gehören, linear unabhängig sind.Die kanonische Normalform des Beispielsystems lautet
Die Matrix
 besitzt nur Spalten (hier Elemente) ungleich 0. Der Test auf lineare Abhängigkeit entfällt hier, da das System einfache Eigenwerte hat.
besitzt nur Spalten (hier Elemente) ungleich 0. Der Test auf lineare Abhängigkeit entfällt hier, da das System einfache Eigenwerte hat.Das System ist vollständig beobachtbar.
Kriterium von Hautus
Das System (A,C) ist genau dann vollständig beobachtbar nach Hautus[LUN:RT2 4], wenn die Bedingung:

- für alle Eigenwerte λi(i = 1,2,...,n) der Matrix A erfüllt ist.
Die Systemmatrix des Beispiels hat die Eigenwerte λ1 = − 2 und λ2 = − 4. Für beide Eigenwerte ist die Bedingung
erfüllt. Das System ist also vollständig beobachtbar.
Beobachtbarkeit von Abtastsystemen
Die oben genannten Beziehungen gelten auch für Abtastsysteme, wenn
durch die Transitionsmatrix ersetzt wird. Nach [LUN:RT2 5] kann die Überprüfung vereinfacht werden, indem zunächst die Bedingungen für das kontinuierliche System geprüft werden und dann die Zusatzbedingung für
für 
erfüllt ist.
Beobachter-Normalform
Für ein System mit einem Eingang und einem Ausgang kann die Beobachter-Normalform unter anderem aus der zur Übertragungsfunktion
 äquivalenten Differentialgleichung bestimmt werden.
äquivalenten Differentialgleichung bestimmt werden.
 .
.
Das Beispielsystem hat die Übertragungsfunktion
 .
.
Daraus folgt mit b0 = 8, a0 = 8 und a1 = 6
Reduzierter Beobachter
Oft können einige Zustandsgrößen direkt gemessen werden. Damit ist es nicht notwendig, diese zu rekonstruieren. Ein reduzierter Beobachter kann daher hergeleitet werden, der nur noch die nicht gemessenen Zustandsgrößen rekonstruiert. Die Ordnung des reduzierten Beobachters ist gegenüber dem vollständigen Beobachter um die Anzahl der Messgrößen reduziert. Dieses Verfahren läßt sich auch für den Fall erweitern, dass die Messgrößen keine Zustandsgrößen sind.[LUN:RT2 6]
Nach Umsortieren der Matrizenzeilen in gemessene
 und beobachtete
und beobachtete  Zustände lautet die Zustandsraumdarstellung des Eingrößensystems
Zustände lautet die Zustandsraumdarstellung des EingrößensystemsDie Zustandsgleichung des vollen Systems ist
und die des reduzierten Systems ist
 .
.
Die Messgleichung des vollen Systems ist
und die des reduzierten Systems ist
 .
.
Die Substitution
in die Gleichung des vollen Beobachters eingesetzt ergibt
 .
.
In dieser Darstellung stört noch die zeitliche Ableitung von y. Die Transformation
ergibt die Gleichung
und daraus den geschätzten Zustandsvektor
 .
.
Quellen
Otto Föllinger: Regelungstechnik, Einführung in die Methoden und ihre Anwendung. ISBN 3-7785-2336-8.
- ↑ Abschn. 13.7.2 / Formel (13.158)
Otto Föllinger: Nichtlineare Regelungen. 7., überarb. u. erw. Auflage. Bd.2 Harmonische Balance, Popow- und Kreiskriterium, Hyperstabilität, Synthese im Zustandsraum, Oldenbourg, München 1993.
- ↑ Abschnitt 7.5
Jan Lunze: Regelungstechnik 2: Mehrgrößensysteme Digitale Regelung. 5. Auflage. Springer Verlag, Heidelberg 2008, ISBN 978-3-540-78462-3.
- ↑ Abschnitt 3.3.2
- ↑ Abschnitt 3.4
- ↑ Abschnitt 3.2.2
- ↑ a b Abschnitt 3.2.4
- ↑ Abschnitt 11.3.3
- ↑ Abschnitt 8.4
Literatur
- S.D.G. Cumming: Design of observers of reduced dynamics. Electronic Letters 5, 1969, S. 213-214.
- D. G. Luenberger: Observing the state of a linear system. IEEE Transaction on Military Electronics, (8), 1964, S. 74-80.
- R.E. Kalman and B. Bucy: New results in linear filtering and prediction theory. Trans ASME, Series D, Journal of Basic Engineering(ASME),83D, 1961, S. 98-108.
- A. Gelb: Applied Optimal Estimation. The MIT press, Massachusetts Institute of Technology, Massachusetts 1974.
- Otto Föllinger: Regelungstechnik, Einführung in die Methoden und ihre Anwendung. ISBN 3-7785-2336-8.

























Wikimedia Foundation.