- Beschleunigtes Bezugssystem
-
Beschleunigte Bezugssysteme sind alle Bezugssysteme, die kein Inertialsystem sind.
Obwohl in beschleunigten Bezugssystemen die physikalischen Gesetze im allgemeinen komplizierter aussehen (in der Mechanik treten z. B. Trägheitskräfte auf), können diese Bezugssysteme in manchen Fällen dennoch die Lösung bestimmter Probleme vereinfachen.
Das ist meist dann der Fall, wenn sie an die Bewegungen angepasst sind, die Bewegungen im beschleunigten Bezugssystem also einfach werden:
- Rotierende Kreis- oder Spiralbewegungen um ein gemeinsames Zentrum lassen sich z. B. in um das Zentrum gleichförmig rotierenden Bezugssystemen oft gut beschreiben: Der kreiselnde bzw. spiralende Körper ruht dann oder bewegt sich entlang einer Geraden.
- Das Foucaultsche Pendel wird meist in einem Bezugssystem berechnet, das die Erddrehung mitvollführt.
Inhaltsverzeichnis
Kinematik
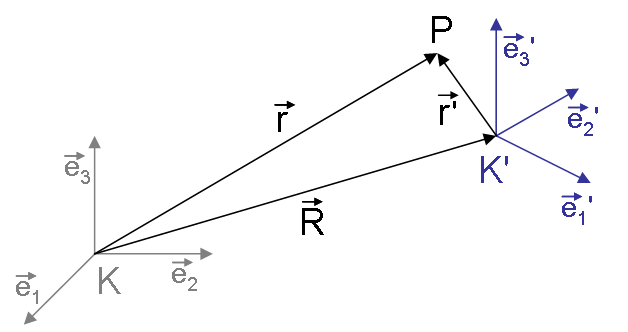
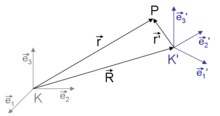 Inertialsystem K und beschleunigtes Koordinatensystem K'. Translation des Ursprungs um
Inertialsystem K und beschleunigtes Koordinatensystem K'. Translation des Ursprungs um
 und Drehung um die x3-Achse
und Drehung um die x3-AchseDer Ortsvektor eines Punktes P sei im Inertialsystem K gleich
 . Der Koordinatenursprung eines bewegten Bezugssystems K' sei von K aus betrachtet bei . Der Ortsvektor des Punktes P in K' sei
. Der Koordinatenursprung eines bewegten Bezugssystems K' sei von K aus betrachtet bei . Der Ortsvektor des Punktes P in K' sei  .
.Im Folgenden sollen die zeitlichen Ableitungen, also Geschwindigkeit und Beschleunigung berechnet werden. Der Ortsvektor von P komponentenweise bzgl. K. Schreibe die Komponenten, die in K' dargestellt sind gestrichen.
Nun wird zuerst die Zeitableitung für Vektoren, die im bewegten Bezugssystem dargestellt sind, berechnet. Da K' rotieren darf, ändern sich auch dessen Basisvektoren und müssen somit auch differenziert werden (Produktregel):
Die Länge der normierten Basisvektoren ändert sich nicht, deren Richtung kann sich aber von K aus gesehen ändern. Dem entspricht eine Rotation um die durch
 vorgegebene Achse mit der Winkelgeschwindigkeit ω. Der Zusammenhang zwischen Inertialbasis und Basis des bewegten Bezugssystems ist gegeben durch die lineare (längen- und orientierungstreue) Abbildung:
vorgegebene Achse mit der Winkelgeschwindigkeit ω. Der Zusammenhang zwischen Inertialbasis und Basis des bewegten Bezugssystems ist gegeben durch die lineare (längen- und orientierungstreue) Abbildung:Die Komponenten der dreidimensionalen Drehmatrix
 sind dabei (mit Kronecker-Delta δij und Epsilon-Tensor εikj)
sind dabei (mit Kronecker-Delta δij und Epsilon-Tensor εikj)Die schiefsymmetrische Matrix
 ist dabei die Erzeugende der passiven Drehung um die
ist dabei die Erzeugende der passiven Drehung um die  -Achse.
-Achse.Da die Basisvektoren gedreht werden, handelt es sich um eine passive Drehung; deswegen das negative Vorzeichen in der J-Matrix. Die zeitliche Ableitung der Drehmatrix lässt sich als Matrizenmultiplikation darstellen:
Dabei entspricht
 der Matrixdarstellung des Kreuzprodukts
der Matrixdarstellung des Kreuzprodukts  .
.Somit lässt sich die zeitliche Ableitung der gestrichenen Basisvektoren in drei Dimensionen als Kreuzprodukt darstellen:
Wirkt eine Ableitung nur auf die gestrichen Komponenten von
, so schreibe dafür die gestrichene Ableitung. Dies ist die zeitliche Änderung des Vektors  , also die Geschwindigkeit
, also die Geschwindigkeit  , die man im bewegten Bezugssystem K' misst:
, die man im bewegten Bezugssystem K' misst:Zusammen ergibt sich also:
Somit entspricht einer Zeitableitung in K die gestrichene Zeitableitung in K' plus der Rotation von K':
Speziell für den Vektor ω gilt:
Um die zweite Ableitung zu berechnen, verwende zweimal obige Relation:
Für den Punkt P mit erhält man schließlich die Geschwindigkeit und Beschleunigung:
erhält man schließlich die Geschwindigkeit und Beschleunigung:Dynamik
Die newtonschen Bewegungsgleichungen gelten nur für Inertialsysteme und lauten:
In allen Bezugssystemen ist eine externe Kraft gleich, diese muss nur bzgl. der jeweiligen Basisvektoren ausgedrückt werden:
 . Einsetzen in obige Gleichung für die Beschleunigung und Umstellen nach
. Einsetzen in obige Gleichung für die Beschleunigung und Umstellen nach  liefert:
liefert:Somit erhält man diese vier Trägheitskräfte als zusätzliche Terme in der Bewegungsgleichung bzgl. K'. Im Folgenden werden verschiedene Spezialfälle diskutiert.
Beschleunigte Translationsbewegung
Hier gilt
 , so dass sich die Bewegungsgleichung vereinfacht zu:
, so dass sich die Bewegungsgleichung vereinfacht zu:Dies ist z.B. der Fall eines mit einem geradlinig bewegten Fahrzeug verbundenen Bezugssystems. Sei
 , also es soll keine externe Kraft wirken. Bremst das Fahrzeug, so ist die Beschleunigung negativ (= Verzögerung)
, also es soll keine externe Kraft wirken. Bremst das Fahrzeug, so ist die Beschleunigung negativ (= Verzögerung)  und somit
und somit  0" border="0">. Ein im Fahrzeug sich befindlicher Körper wird also in Fahrtrichtung beschleunigt (z.B. Autofahren: "Kopfnicker" beim kurzen starken Bremsen).
0" border="0">. Ein im Fahrzeug sich befindlicher Körper wird also in Fahrtrichtung beschleunigt (z.B. Autofahren: "Kopfnicker" beim kurzen starken Bremsen).Rotierendes Bezugssystem
Es soll
 gelten, d.h. der Ursprung von K' bewegt sich gleichförmig gegenüber dem Ursprung von K:
gelten, d.h. der Ursprung von K' bewegt sich gleichförmig gegenüber dem Ursprung von K:Bezugssystem an der Erdoberfläche
Die Winkelgeschwindigkeit der Erde ist konstant, d.h.
 . Hier rotiert (= Vektor vom Erdmittelpunkt zum Ursprung von K' an der Erdoberfläche) mit derselben Winkelgeschwindigkeit wie K':
. Hier rotiert (= Vektor vom Erdmittelpunkt zum Ursprung von K' an der Erdoberfläche) mit derselben Winkelgeschwindigkeit wie K':Stellt man
 bzgl. K' dar, so ergibt die zweite Zeitableitung ( ist bzgl. K' konstant):
bzgl. K' dar, so ergibt die zweite Zeitableitung ( ist bzgl. K' konstant):Somit ergibt sich die Bewegungsgleichung:
Für Bewegungen, die in der Nähe der Erdoberfläche verlaufen, kann man den letzten Term vernachlässigen, da hier
 gilt.
gilt.Setze als Kraft die Gravitationskraft
 ein:
ein:Man fasst normalerweise die Gravitationsbeschleunigung (
 wirkt in radiale Richtung) und die Zentrifugalbeschleunigung (
wirkt in radiale Richtung) und die Zentrifugalbeschleunigung ( wirkt senkrecht zur Erdachse) zusammen zu einer effektiven Schwerebeschleunigung (zur Ermittlung der Richtung bilde die Vektorsumme). Da die Zentrifugalbeschleunigung von der geographischen Breite abhängt (an den Polen Null und am Äquator maximal), ist die effektive Schwerebeschleunigung von der geographischen Breite abhängig; die Erdoberfläche ist näherungsweise eine Äquipotentialfläche der effektiven Schwerebeschleunigung, nämliche ein Ellipsoid, das im Vergleich zur Kugel an den Polen abgeplattet ist.
wirkt senkrecht zur Erdachse) zusammen zu einer effektiven Schwerebeschleunigung (zur Ermittlung der Richtung bilde die Vektorsumme). Da die Zentrifugalbeschleunigung von der geographischen Breite abhängt (an den Polen Null und am Äquator maximal), ist die effektive Schwerebeschleunigung von der geographischen Breite abhängig; die Erdoberfläche ist näherungsweise eine Äquipotentialfläche der effektiven Schwerebeschleunigung, nämliche ein Ellipsoid, das im Vergleich zur Kugel an den Polen abgeplattet ist.  bestimmt die Vertikale von der Erdoberfläche, die von der radialen Richtung etwas abweicht.
bestimmt die Vertikale von der Erdoberfläche, die von der radialen Richtung etwas abweicht.Man betrachte ein mitbewegtes Koordinatensystem K' auf der Erdoberfläche, das so ausgerichtet ist, dass
 in Richtung Osten,
in Richtung Osten,  in Richtung Norden und
in Richtung Norden und  zum Zenit zeigt. Die Winkelgeschwindigkeit der Erde lautet in K', wobei ϕ die geographische Breite ist,
zum Zenit zeigt. Die Winkelgeschwindigkeit der Erde lautet in K', wobei ϕ die geographische Breite ist,Somit lautet die Coriolisbeschleunigung
Beispiel: Foucaultsches Pendel
Für weitere Erklärung siehe Foucaultsches Pendel, hier soll explizit die Berechnung durchgeführt werden.
Man betrachte ein mathematisches Pendel auf der Erdoberfläche. Für kleine Auslenkungen (Auslenkung viel kleiner als Pendellänge) gilt die Näherung
 bzw.
bzw.  und die Pendelmasse schwingt in der x'-y'-Ebene; somit kann man die Bewegung zweidimensional betrachten. Es wirkt auf die Pendelmasse m die rücktreibende Kraft
und die Pendelmasse schwingt in der x'-y'-Ebene; somit kann man die Bewegung zweidimensional betrachten. Es wirkt auf die Pendelmasse m die rücktreibende Kraft  mit
mit  und die Corioliskraft
und die Corioliskraft  . Die Zwangskraft der Pendelaufhängung führt dazu, dass aus der eigentlich wirkenden Gewichtskraft
. Die Zwangskraft der Pendelaufhängung führt dazu, dass aus der eigentlich wirkenden Gewichtskraft  die rücktreibende Kraft
die rücktreibende Kraft  resultiert und dass die z'-Komponente der Corioliskraft kompensiert wird. Die Bewegungsgleichung der Pendelmasse lautet:
resultiert und dass die z'-Komponente der Corioliskraft kompensiert wird. Die Bewegungsgleichung der Pendelmasse lautet:Die zwei gekoppelten gewöhnlichen Differentialgleichungen zweiter Ordnung lassen sich einfach in der komplexen Darstellung lösen, wobei u: = x' + iy' definiert wird.
Diese Differentialgleichung hat die allgemeine Lösung
Der Term in runden Klammern beschreibt die "normale" Schwingung des Pendels mit der leicht verschobenen Frequenz
 , wobei im Allgemeinen die Bahnkurven der normalen zweidimensionalen Schwingung Ellipsen sind (je nach Anfangsbedingung, ist auch die Bewegung entlang einer Gerade möglich). Diese wird von einer weiteren Schwingung
, wobei im Allgemeinen die Bahnkurven der normalen zweidimensionalen Schwingung Ellipsen sind (je nach Anfangsbedingung, ist auch die Bewegung entlang einer Gerade möglich). Diese wird von einer weiteren Schwingung  überlagert, nämlich der Drehung der Schwingungsebene. Aus der Überlagerung beider Schwingungen kommen die bekannten Rosettenbahnen zustande. Mit Ω = 360°/Tag=15°/Stunde dreht sich bei einer geographische Breite ϕ die Schwingungsebene um
überlagert, nämlich der Drehung der Schwingungsebene. Aus der Überlagerung beider Schwingungen kommen die bekannten Rosettenbahnen zustande. Mit Ω = 360°/Tag=15°/Stunde dreht sich bei einer geographische Breite ϕ die Schwingungsebene umauf der Nordhalbkugel (
 und
und  ) also im Uhrzeigersinn (in der Mathematik wird ein positiver Winkel im Gegenuhrzeigersinn definiert, negativer Winkel bedeutet also im Uhrzeigersinn). Für Deutschland mit ca. ϕ = 50° nördlicher Breite dreht sich die Schwingungsebene um etwa -11,5° pro Stunde.
) also im Uhrzeigersinn (in der Mathematik wird ein positiver Winkel im Gegenuhrzeigersinn definiert, negativer Winkel bedeutet also im Uhrzeigersinn). Für Deutschland mit ca. ϕ = 50° nördlicher Breite dreht sich die Schwingungsebene um etwa -11,5° pro Stunde.Die Konstanten
 sind aus den Anfangsbedingungen
sind aus den Anfangsbedingungen  zu bestimmen:
zu bestimmen:Literatur
- F. Scheck: Theoretische Physik 1. Mechanik. Springer Verlag, ISBN 978-3-540-71377-7



![\hat{e}'_{i}=\sum_{j}\left[R_{\vec{\omega}}\right]_{ij}\hat{e}_{j}](8/6888c107fed6416e335cdb0fcbdeb2bc.png)
![[R_{\vec{\omega}}]_{ij}=\left[1-\cos(\omega t)\right]n_{i}n_{j}+\cos(\omega t)\,\delta_{ij}+\sin(\omega t)\,[J_{\hat{n}}]_{ij}=\left[\exp\left(\omega t J_{\hat{n}}\right)\right]_{ij}](c/decc22fe169cfeaad3c2d9b3269d734e.png)
![[J_{\hat{n}}]_{ij}=\sum_{k}-\varepsilon_{ikj}n_{k}=\sum_{k}\varepsilon_{kij}n_{k}](c/a2c16e0554c51eed520463e67a1abe3c.png)

![\sum_{i}x'_{i}\frac{\mathrm{d}\hat{e}'_{i}}{\mathrm{d}t}=\sum_{i,j,l}x'_{i}\omega\left[J_{\hat{n}}\right]_{ij}\left[R_{\vec{\omega}}\right]_{jl}\hat{e}_{l}=\sum_{i,j,k}\varepsilon_{kij}\underbrace{\omega n_{k}}_{\omega_{k}}x'_{i}\hat{e}'_{j}=\vec{\omega}\times\vec{r}\,'](0/e707fdddcb730f6d61fb1d374e8e02f0.png)























![\begin{align}
u_{1} & =\frac{1}{2\omega}\left[(\omega+\Omega_{v})x'_{0}+\dot{y}'_{0}\right]+\frac{\mathrm{i}}{2\omega}\left[(\omega+\Omega_{v})y'_{0}-\dot{x}'_{0}\right]\\
u_{2} & =\frac{1}{2\omega}\left[(\omega-\Omega_{v})x'_{0}-\dot{y}'_{0}\right]+\frac{\mathrm{i}}{2\omega}\left[(\omega-\Omega_{v})y'_{0}+\dot{x}'_{0}\right]\end{align}](1/bf1c340eb0b038e817d189c8e15876c6.png)
Wikimedia Foundation.