- Winkelgeschwindigkeit
-
Physikalische Größe Name Winkelgeschwindigkeit, Rotationsgeschwindigkeit, Drehgeschwindigkeit Größenart Frequenz Formelzeichen der Größe 
Abgeleitet von Winkel Größen- und
Einheiten-
systemEinheit Dimension SI rad/s T −1 Die Winkelgeschwindigkeit ist in der Physik eine vektorielle Größe, die angibt, wie schnell sich ein Winkel mit der Zeit um eine Achse ändert. Ihr Formelzeichen ist
. Die SI-Einheit der Winkelgeschwindigkeit ist  . Sie spielt insbesondere bei Rotationen eine Rolle und wird dann auch als Rotationsgeschwindigkeit oder Drehgeschwindigkeit bezeichnet. In vielen Fällen, bei denen sich die Richtung der Drehachse im Bezugssystem nicht ändert, reicht die skalare Verwendung als Betrag des Vektors aus. Eng mit der Winkelgeschwindigkeit verwandt ist die Kreisfrequenz.
. Sie spielt insbesondere bei Rotationen eine Rolle und wird dann auch als Rotationsgeschwindigkeit oder Drehgeschwindigkeit bezeichnet. In vielen Fällen, bei denen sich die Richtung der Drehachse im Bezugssystem nicht ändert, reicht die skalare Verwendung als Betrag des Vektors aus. Eng mit der Winkelgeschwindigkeit verwandt ist die Kreisfrequenz.Inhaltsverzeichnis
Definition
 Winkelgeschwindigkeit als Pseudovektor
Winkelgeschwindigkeit als Pseudovektor
Die Winkelgeschwindigkeit
ist ein Pseudovektor, der die Drehachse und Schnelligkeit einer Rotationsbewegung angibt. Die Richtung des Vektors ist dabei senkrecht zur Rotationsebene und gibt die Rotationsrichtung an (mit oder gegen den Uhrzeigersinn im gewählten Bezugssystem, siehe Drei-Finger-Regel). Aus seinem Betrag  erhält man die Ableitung des Rotationswinkels φ nach der Zeit t:
erhält man die Ableitung des Rotationswinkels φ nach der Zeit t:Der Betrag der Winkelgeschwindigkeit wird bei Vorgängen verwendet, bei denen sich die Drehachse nicht ändert. Die Ursache für nicht konstante Winkelgeschwindigkeit ist eine Winkelbeschleunigung, bei konstanter Winkelgeschwindigkeit vereinfacht sich der Ausdruck zu
wobei der Winkel Δφ in der Zeit Δt überstrichen wird. Die Angabe einer konstanten Winkelgeschwindigkeit ist im Gegensatz zur Tangentialgeschwindigkeit
 unabhängig vom Radius
unabhängig vom Radius  . Die Bahngeschwindigkeit lässt sich dann als Kreuzprodukt aus Winkelgeschwindigkeit und Radiusvektor schreiben:
. Die Bahngeschwindigkeit lässt sich dann als Kreuzprodukt aus Winkelgeschwindigkeit und Radiusvektor schreiben:Bei Verwendung der Beträge vereinfacht sich diese Formel zum normalen Produkt der Beträge:
 .
.
Das Kreuzprodukt kann durch eine Matrixmultiplikation ersetzt werden, da sich die Winkelgeschwindigkeit zu einem Tensor zweiter Stufe verallgemeinern lässt. Dieser kann durch eine schiefsymmetrische Matrix dargestellt werden:[1]
Winkelgeschwindigkeit des Sehstrahls
Ebene Bewegung
 Die Winkelgeschwindigkeit des Sehstrahls vom Ursprung O zum Teilchen P wird bestimmt durch die Tangentialgeschwindigkeit des Geschwindigkeitsvektors v.
Die Winkelgeschwindigkeit des Sehstrahls vom Ursprung O zum Teilchen P wird bestimmt durch die Tangentialgeschwindigkeit des Geschwindigkeitsvektors v.Der Geschwindigkeitsvektor v eines Teilchens P relativ zu einem Beobachter O kann in Polarkoordinaten zerlegt werden. Die radiale Komponente des Geschwindigkeitsvektors ändert die Richtung des Sehstrahls nicht. Zwischen der tangentialen Komponente und der Winkelgeschwindigkeit des Sehstrahls besteht die Beziehung:
Es ist anzumerken, dass die Winkelgeschwindigkeit des Sehstrahls vom (willkürlich) gewählten Ort des Beobachters abhängt.
Räumliche Bewegung
In drei Dimensionen ist die Winkelgeschwindigkeit sowohl durch ihren Betrag, als auch durch ihre Richtung gekennzeichnet.
Wie im zwei-dimensionalen Fall hat das Teilchen eine Komponente seines Geschwindigkeitsvektors in Richtung des Radiusvektors und eine weitere senkrecht dazu. Die Ebene, die durch den Ursprung geht und in der die senkrechte Komponente des Geschwindigkeitsvektors liegt, definiert eine Rotationsebene, in der das Verhalten des Teilchens für einen Augenblick wie im zwei-dimensionalen Fall erscheint. Die Rotationsachse ist dann senkrecht zu dieser Ebene und definiert die Richtung des Vektors der Winkelgeschwindigkeit. Radius- und Geschwindigkeitsvektor werden als bekannt vorausgesetzt. Es gilt dann:
Auch hier gilt, dass die so berechnete Winkelgeschwindigkeit vom (willkürlich) gewählten Ort des Beobachters abhängt. Eine Anwendung ist die Relativbewegung von Objekten in der Astronomie (siehe Eigenbewegung (Astronomie)).
Komponenten von Euler-Winkeln
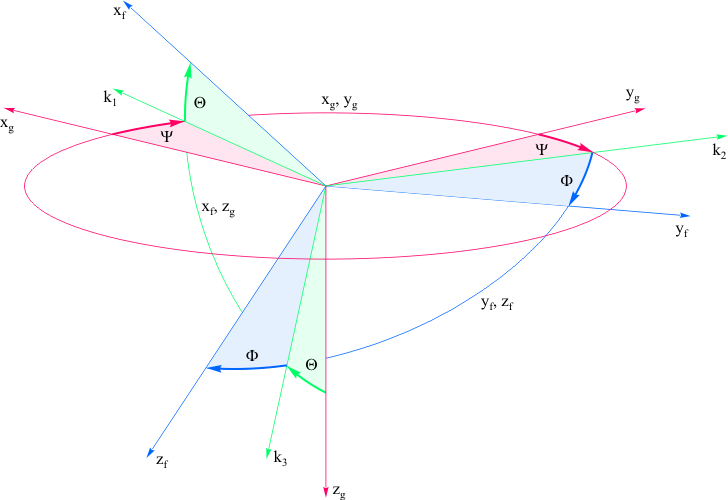
Im Fahrzeug- oder Flugzeugbau wird die Orientierung des fahrzeugfesten Systems relativ zum erdfesten System in Euler-Winkeln angegeben. Genormt sind drei aufeinander folgende Drehungen. Zuerst um die z-Achse des Systems g (Gierwinkel), dann um die y-Achse des gedrehten Systems (Nickwinkel) und schließlich um die x-Achse des körperfesten Koordinatensystems (Wank/Rollwinkel).
Die Winkelgeschwindigkeit des körperfesten Systems ergibt sich aus den Winkelgeschwindigkeiten um diese Achsen.
Diese Basis ist nicht orthonormal. Die Einheitsvektoren können jedoch mit Hilfe von Elementardrehungen berechnet werden.
Winkelgeschwindigkeit des starren Körpers
 Beweis der Unabhängigkeit der Winkelgeschwindigkeit von der Wahl des Bezugspunkts
Beweis der Unabhängigkeit der Winkelgeschwindigkeit von der Wahl des BezugspunktsDer starre Körper möge um eine beliebige Achse rotieren. Es wird gezeigt, dass die Winkelgeschwindigkeit unabhängig von der Wahl des Bezugspunkts auf dieser Achse ist. Dies bedeutet, dass die Winkelgeschwindigkeit eine unabhängige Eigenschaft des rotierenden starren Körpers ist.
Der Ursprung des Laborsystems ist in O, während O1 und O2 zwei Punkte auf dem starren Körper mit den Geschwindigkeiten
 bzw.
bzw.  sind. Angenommen die Winkelgeschwindigkeit relativ zu O1 bzw. O2 sei
sind. Angenommen die Winkelgeschwindigkeit relativ zu O1 bzw. O2 sei  bzw.
bzw.  Da Punkt P und O2 jeweils nur eine Geschwindigkeit haben, gilt:
Da Punkt P und O2 jeweils nur eine Geschwindigkeit haben, gilt:Die beiden obigen Gleichungen ergeben:
Da der Punkt P (und damit
 ) beliebig wählbar ist, folgt daraus:
) beliebig wählbar ist, folgt daraus:Die Winkelgeschwindigkeit des starren Körpers ist somit unabhängig von der Wahl des Bezugspunkts der Drehachse. In Kraftfahrzeugen kann somit die Gierrate unabhängig vom Einbauort des Gierratensensors gemessen werden.
Anwendungen und Beispiele
Die Winkelgeschwindigkeit tritt in vielen Gleichungen und Anwendungsfällen der Physik und Technik auf.
- Ein Himmelskörper, der sich in einer Entfernung R von der Erde mit Geschwindigkeit vt senkrecht zur Sehlinie bewegt, zeigt am Himmel eine scheinbare Winkelgeschwindigkeit (Eigenbewegung) μ = vt / R.
- Bei der Rotation eines starren Körpers ist die Winkelgeschwindigkeit ω im Gegensatz zur Geschwindigkeit v vom Radius unabhängig.
- Nach dem dritten Kepler'schen Gesetz verhalten sich die Quadrate der Umlaufzeiten T der Planeten wie die dritten Potenzen der großen Halbachsen a ihrer Bahnen. Die Winkelgeschwindigkeiten verhalten sich demnach wie
 („Kepler-Rotation“). Gemäß dem zweiten Kepler'schen Gesetz ist die Winkelgeschwindigkeit eines Planeten auf einer elliptischen Umlaufbahn in Bezug auf die Sonne vom jeweiligen Abstand abhängig und variiert somit längs der Bahn. Sie ist am größten, wenn der Planet sich im Perihel befindet, und am kleinsten, wenn er sich im Aphel befindet.
(„Kepler-Rotation“). Gemäß dem zweiten Kepler'schen Gesetz ist die Winkelgeschwindigkeit eines Planeten auf einer elliptischen Umlaufbahn in Bezug auf die Sonne vom jeweiligen Abstand abhängig und variiert somit längs der Bahn. Sie ist am größten, wenn der Planet sich im Perihel befindet, und am kleinsten, wenn er sich im Aphel befindet.
- Die Winkelgeschwindigkeit eines Rotors in einem Elektromotor, der sich konstant mit 3.000 Umdrehungen pro Minute dreht (siehe Drehzahl), beträgt
- Sei ω0 die Kreisfrequenz der harmonischen Schwingung eines Pendels mit der Amplitude
 . Dann berechnet sich die Winkelgeschwindigkeit des Pendels als Funktion der Zeit:
. Dann berechnet sich die Winkelgeschwindigkeit des Pendels als Funktion der Zeit:
Siehe auch
Bei Flugzeugen oder Pkw werden die Winkelgeschwindigkeiten in Komponenten des fahrzeugfesten Koordinatensystems angegeben. Entsprechend den x, y, z-Komponenten spricht man von Roll/Wankgeschwindigkeit, Nickgeschwindigkeit, Giergeschwindigkeit.
- im Flugwesen: Rollachse, Querachse, Gierachse
- im Fahrzeugbau: Fahrdynamik
Literatur
Die Winkelgeschwindigkeit wird in vielen Lehrbüchern und Formelsammlungen der Natur- und Ingenieurswissenschaften behandelt.
- Horst Stöcker: Taschenbuch der Physik. 6 Auflage. Harri Deutsch, ISBN 978-3817118601.
- Lothar Papula: Mathematik für Ingenieure und Naturwissenschaftler 1. 12 Auflage. Vieweg+Teubner, ISBN 978-3834805454.
Einzelnachweise
Kategorie:- Physikalische Größenart















![\omega(t)=\dot\varphi(t)=\frac d{dt}[\hat\varphi\cdot\sin(\omega_0 t)] = \hat\varphi\cdot\omega_0\cdot\cos(\omega_0 t)](a/daa55c9e3ff18ac6dee752e0a72ab0ad.png)
Wikimedia Foundation.