- Wendelfläche
-
Eine Minimalfläche ist eine Fläche im Raum, die lokal minimalen Flächeninhalt hat. Derartige Formen nehmen beispielsweise Seifenhäute an, sofern sie nicht wie im Fall von Blasen durch eingeschlossene Luft aufgebläht werden.
In mathematischer Sprache sind Minimalflächen die kritischen Punkte des Flächeninhaltsfunktionals:
 .
.
Hierbei sind die Größen
 und
und 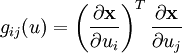 für
für  erklärt. (vgl. Hesse-Matrix) Man beachte, dass eine Minimalfläche nicht notwendig minimalen Flächeninhalt hat, sondern lediglich ein stationärer Punkt des Flächeninhaltsfunktionals ist. Man kann zeigen, dass das Verschwinden der ersten Variation des Flächeninhaltsfunktionals in zwei Raumdimensionen äquivalent zum Verschwinden der mittleren Krümmung ist.
erklärt. (vgl. Hesse-Matrix) Man beachte, dass eine Minimalfläche nicht notwendig minimalen Flächeninhalt hat, sondern lediglich ein stationärer Punkt des Flächeninhaltsfunktionals ist. Man kann zeigen, dass das Verschwinden der ersten Variation des Flächeninhaltsfunktionals in zwei Raumdimensionen äquivalent zum Verschwinden der mittleren Krümmung ist.Minimalflächen stehen schon seit dem 19. Jahrhundert im Blickpunkt mathematischer Forschung. Ein wesentlicher Beitrag dazu waren die Experimente des belgischen Physikers Joseph Plateau.
 Die Enneperfläche ist eine Minimalfläche.
Die Enneperfläche ist eine Minimalfläche.Inhaltsverzeichnis
Ausführungen zur Existenztheorie in zwei Veränderlichen
Ein zweidimensionaler Parameterbereich stellt immer eine Besonderheit dar. Denn mit den Werkzeugen der Funktionentheorie kann man viel weitergehende Aussagen als in höheren Raumdimensionen erzielen. Dadurch kann man sich zum Beispiel immer auf die Kreisscheibe als Parameterbereich mit dem Riemannschen Abbildungssatz zurückziehen. Auch gilt der Uniformisierungssatz nur in zwei Raumdimension. Er erlaubt es isotherme Parameter einzuführen, welche bei der Lösung im parametrischen Falle benötigt werden. Darum ist die Theorie in zwei Veränderlichen auch besonders weit entwickelt.
Formulierung als Variationsproblem
Nun ist eine Fläche genau dann eine Minimalfläche, wenn sie an jedem Punkt die mittlere Krümmung Null hat. Damit stellt sich eine Minimalfläche als Spezialfall einer Fläche vorgeschriebener mittlerer Krümmung dar. Diese entziehen sich ebenfalls nicht der Variationsrechnung, sie sind Minima des Hildebrandtschen Funktionals
 .
.
Die Eulerschen Gleichungen als notwendige Minimalitätsbedingungen dieses Funktionals sind das nach Franz Rellich benannte H-Flächensystem
 .
.
Hierbei ist
 die mittlere Krümmung.
die mittlere Krümmung.Parametrischer Fall
Für dieses Funktional stellt sich die Frage nach der Existenz von lokalen Minima bei vorgegebener stetiger Randkurve endlicher Länge. Diese Aufgabe bezeichnet man in der Literatur auch häufig als Plateausches Problem. Unter Annahme einer Kleinheitsbedingung an die mittlere Krümmung, welche im Minimalflächenfall immer erfüllt ist, kann diese Frage positiv beantwortet werden. Um sich davon zu überzeugen, minimiert man gleichzeitig A und das Energiefunktional
unter Einführung sogenannter fast-isothermer Parameter. Im Jahre 1884 bewies Herrmann Amandus Schwarz den folgenden Satz: In der Menge der stetig differenzierbaren, einfach geschlossenen, orientierbaren Flächen vom Geschlecht Null (d.h. ohne Löcher) ist die Kugel die Fläche, welche bei gegebener Oberfläche den größten Rauminhalt umgrenzt.
Verzweigungspunkte
Stellen, an denen die Lösung
 erfüllt, nennt man Verzweigungspunkte. Verzweigungspunkte sind so interessant, weil an diesen Punkten die Parametrisierung singulär werden kann. Oder viel schlimmer noch ist die zweite Möglichkeit, es könnte auch sein, dass die Lösung lokal keine Fläche mehr ist, sondern nur noch eine Kurve. Nun liefern funktionentheoretische Überlegungen, welche wesentlich durch Arbeiten von Carleman und Vekua inspiriert sind, dass die Lösung höchstens endlich viele solcher Verzweigungspunkte haben kann. Leider schließt die obige Methode solche Verzweigungspunkte nicht a-priori aus. Erst mit dem aufwändigen Satz von Gulliver-Alt-Ossermann gelingt dieses a-posteriori. Darum besteht der Wunsch, das Plateausche Problem in der Klasse der verzweigungspunktfreien H-Flächen zu lösen. Das ist bis heute eine offene Frage.
erfüllt, nennt man Verzweigungspunkte. Verzweigungspunkte sind so interessant, weil an diesen Punkten die Parametrisierung singulär werden kann. Oder viel schlimmer noch ist die zweite Möglichkeit, es könnte auch sein, dass die Lösung lokal keine Fläche mehr ist, sondern nur noch eine Kurve. Nun liefern funktionentheoretische Überlegungen, welche wesentlich durch Arbeiten von Carleman und Vekua inspiriert sind, dass die Lösung höchstens endlich viele solcher Verzweigungspunkte haben kann. Leider schließt die obige Methode solche Verzweigungspunkte nicht a-priori aus. Erst mit dem aufwändigen Satz von Gulliver-Alt-Ossermann gelingt dieses a-posteriori. Darum besteht der Wunsch, das Plateausche Problem in der Klasse der verzweigungspunktfreien H-Flächen zu lösen. Das ist bis heute eine offene Frage.Nicht-parametrischer Fall
Die obige Methode führt allerdings nur für konstantes H zum Erfolg. Hängt die mittlere Krümmung zusätzlich von der Lösung ab, so kann man im Falle eines Graphen immer noch etwas tun. Ist
 ein Graph, so schreibt er sich als
ein Graph, so schreibt er sich als  und die Funktion ζ erfüllt die nicht-parametrische Gleichung vorgeschriebener mittlerer Krümmung
und die Funktion ζ erfüllt die nicht-parametrische Gleichung vorgeschriebener mittlerer Krümmung .
.
Ein tiefliegendes Existenzresulat liefert die Lösbarkeit des Dirichletproblems dieser partiellen Differentialgleichung ebenfalls unter Annahme einer Kleinheitsbedingung und weiteren technischen Voraussetzungen. Die Eindeutigkeit ist durch ein Maximumprinzip für die Differenz zweier Lösungen ebenfalls geklärt. Darüber hinaus sind Graphen wegen
immer verzweigungspunktfrei.
Beispiele von Minimalflächen
Hier werden mehrere Beispiele verschiedenster Minimalflächen angegeben. Manche davon kann man nicht in den dreidimensionalen Raum einbetten. Andere sind nicht auf den Rand ihres Definitionsbereiches stetig fortsetzbar, wie das erste Beispiel zeigt.
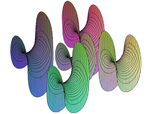
Die Minimalfläche von H. F. Scherk
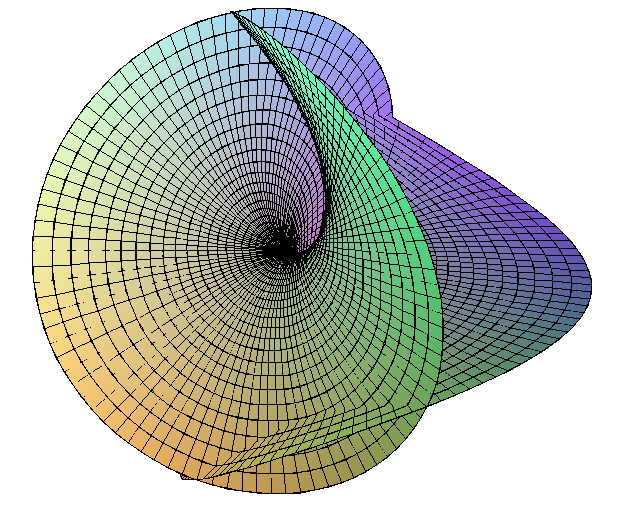
 Eine Zusammenhangs-
Eine Zusammenhangs-
komponente der Minimalfläche von H. F. Scherk zum Parameter c=1.Die Minimalfläche von Heinrich Ferdinand Scherk: Wir suchen alle Lösungen der nicht-parametrischen Minimalflächengleichung, welche sich in der Form
 schreiben lassen und den Bedingungen
schreiben lassen und den Bedingungen  ,
,  genügen. Wir setzen diese Struktur zunächst in die Minimalflächengleichung ein und erhalten
genügen. Wir setzen diese Struktur zunächst in die Minimalflächengleichung ein und erhalten-
 .
.
Äquivalentes Umstellen liefert mit einem

 .
.
Nach der Theorie der gewöhnlichen Differentialgleichungen existiert jeweils genau eine Lösung für die Anfangswertprobleme
 zu den Daten
zu den Daten 
und
 zu den Daten
zu den Daten  .
.
Diese Lösungen lauten
und
 .
.
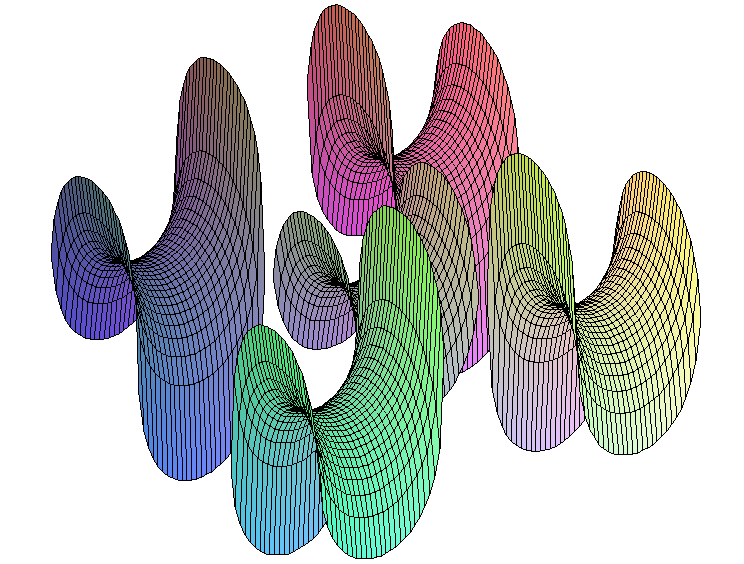
 Mehrere Zusammenhangs-
Mehrere Zusammenhangs-
komponenten der Scherkschen Minimalfläche zum Parameter c=0.2.Hier bleibt zu bemerken, dass wir noch an den Anfangswerten
 und
und  mit einem
mit einem  variieren könnten. Jedoch kann man OBdA wegen der Strukturbedingung und der Tatsache, dass die Funktionen selbst nicht in den gewöhnlichen Differentialgleichungen auftreten, d = 0 fordern. Somit erhalten wir
variieren könnten. Jedoch kann man OBdA wegen der Strukturbedingung und der Tatsache, dass die Funktionen selbst nicht in den gewöhnlichen Differentialgleichungen auftreten, d = 0 fordern. Somit erhalten wir .
.
Wir bemerken, dass diese Minimalfläche auf den Quadraten
 dabei sind k und l
dabei sind k und l
-
-
- entweder beide gerade oder beide ungerade Zahlen

- entweder beide gerade oder beide ungerade Zahlen
-
-
erklärt und nicht darüber hinaus fortsetzbar ist. Diese Fläche ist als Graph in den dreidimensionalen Raum einbettbar.
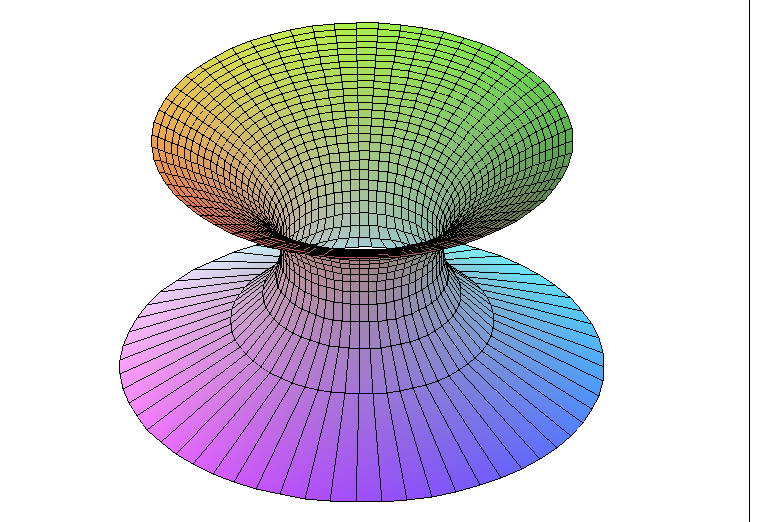
Die Katenoiden
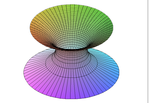 Ein Katenoid zum Parameter c=1.
Ein Katenoid zum Parameter c=1.Wenn man die Kettenlinie um die x-Achse rotieren lässt, so erhält man ebenfalls eine in den dreidimensionalen Raum einbettbare Minimalfläche – einen Katenoiden. Katenoiden sind die einzigen Minimalflächen, welche gleichzeitig auch Rotationsflächen sind. Sie genügen zu einem positiven Parameter c>0 der Gleichung
 .
.
Sie war eine der ersten von Plateau experimentell gefundenen Lösungen des Plateauschen Problems. Hierbei waren die Randdaten zwei Kreisringe, welche die obere und untere Randkurve eines Kegelstumpfes oder Zylinders bilden.
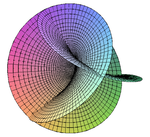
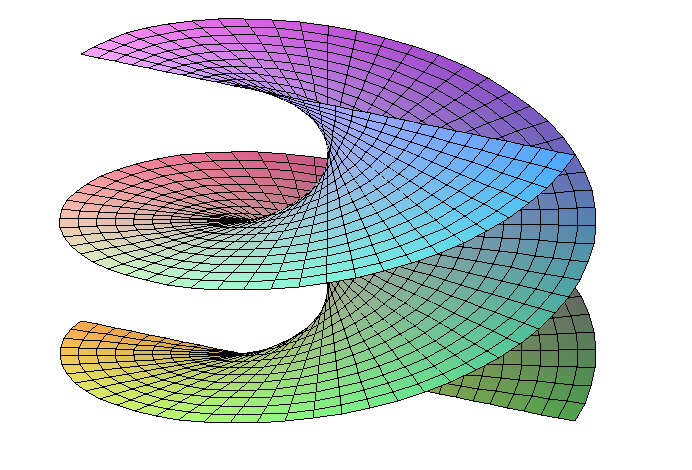
Die Wendelfläche
 Ein Helicoid zum Parameter c=1.
Ein Helicoid zum Parameter c=1.Eng verwandt mit dem Katenoiden ist die Wendelfläche oder Helicoid. Sie geht aus einem Katenoiden durch eine unstetige aber isometrische Deformation hervor. Zu einem Parameter c>0 genügt sie den Gleichungen


 .
.
Auch diese Minimalfläche ist in den dreidimensionalen Raum einbettbar.
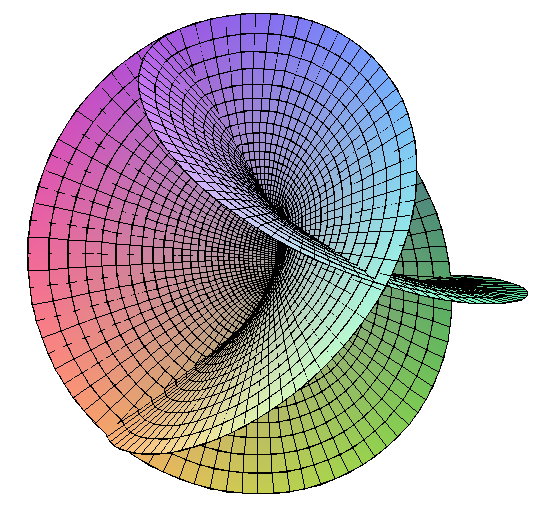
Die Henneberg-Fläche
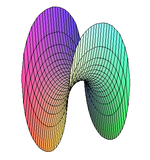
 Die Hennebergsche Minimalfläche.
Die Hennebergsche Minimalfläche.Die Henneberg-Fläche ist ein Beispiel einer Minimalfläche, die nicht in den dreidimensionalen Raum eingebettet werden kann. Ihre Bestimmungsgleichungen lauten


 .
.
Außerdem ist diese Fläche nicht orientierbar, anschaulich gesprochen, kann man nicht entscheiden, welche Seite dieser Fläche oben und welche unten ist.
Höhere Raumdimensionen
In hohen Raumdimensionen ist ein Zugang zum Plateauschen Problem schwer denkbar. Hier hat man lediglich die Möglichkeit die Lösung als Graph aufzufassen. Die Minimalflächengleichung für den Graphen schreibt sich
 .
.
Durch die Theorie der schwachen Lösbarkeit elliptischer Randwertprobleme kann man auch in dieser Situation die Existenz von Lösungen garantieren. Nachfolgende Regularitätsbetrachtungen liefern eine klassische Lösung. Wie in zwei Raumdimensionen erhält man auch hier die Eindeutigkeit durch ein Maximumprinzip für die Differenz zweier Lösungen.
Einige interessante Aussagen über Minimalflächen
Auf Grund der relativ einfachen Struktur der Gleichungen, denen Minimalflächen genügen, kann man eine ganze Reihe an bekannten Aussagen, welche man besonders für holomorphe oder harmonische Funktionen kennt auch auf Minimalflächen in zwei Veränderlichen übertragen.
Maximumprinzip
Für eine Minimalfläche
gilt die Ungleichung .
.
Die Minimalfläche nimmt ihr Maximum also auf dem Rand des Gebietes, auf dem sie erklärt ist, an.
Uniformisierende Abbildungen
In der Geodäsie kann man sogenannte isotherme Parameter einführen. Die Abbildung, die das bewerkstelligt heißt uniformisierende Abbildung. Uniformisierende Abbildungen von Minimalflächen sind harmonische Funktionen.
Reellanalytischer Charakter
Minimalflächen sind, solange sie in isothermen Parametern vorliegen, reellanalytische Funktionen im Inneren des Gebietes, in welchem sie erklärt sind. Das bedeutet, die Parameterdarstellung kann in jedem Punkt des Gebietes in einer Umgebung dieses Punktes in eine konvergente Potenzreihe entwickelt werden. Mithin ist sie unendlich oft differenzierbar. Ist darüber hinaus die Randkurve in einem Punkt reellanalytisch, so kann die Minimalfläche in einer Umgebung dieses Punktes reellanalytisch über den Rand hinaus fortgesetzt werden.
Die Sätze von Bernstein und Liouville
Der Satz von S. Bernstein für Minimalflächen lautet: Eine auf dem ganzen
 erklärte Lösung
erklärte Lösung  der nicht-parametrischen Minimalflächengleichung erfüllt notwendig die Gleichung
der nicht-parametrischen Minimalflächengleichung erfüllt notwendig die Gleichungmit Konstanten
 .
.Aus diesem Satz folgt sofort der Satz von Liouville für Minimalflächen: Eine auf dem ganzen
erklärte beschränkte Lösung der nicht-parametrischen Minimalflächengleichung erfüllt notwendig .
.
Der Flächeninhalt einer Minimalfläche
Der Flächeninhalt einer Minimalfläche
mit der Einheitsnormalen  schreibt sich in der Form
schreibt sich in der Form .
.
Dabei muss angenommen werden, dass die Randkurve einfach geschlossen und stetig differenzierbar ist.
Darstellungsformeln
Um Minimalflächen besser zu verstehen genügt es nicht nur die Differentialgleichungen zu betrachten, denen sie genügen, sondern man sollte auch spezielle Darstellungen der Lösung ermitteln.
Komplexe Darstellung
Unter Einführung isothermer Parameter u und v erhalten wir zunächst das H-Flächensystem für H=0
 .
.
Damit schreibt sich die Gleichung zweiter Ordnung in der Form
mit den komplexen Veränderlichen z1 = u + iv und z2 = u − iv und wir erhalten die Darstellung
 und
und  .
.
Wir nennen eine komplexe Kurve
 , welche den Bedingungen
, welche den Bedingungen  und
und  genügt, eine isotrope Kurve. Weiter nennen wir eine Fläche
genügt, eine isotrope Kurve. Weiter nennen wir eine Fläche  , welche sich in der Form
, welche sich in der Form  schreiben lässt, eine Schiebfläche. Eine verallgemeinerte Definition von Minimalflächen ist folgende: Eine Minimalfläche ist eine Schiebfläche, deren Erzeugende isotrope Kurven sind.
schreiben lässt, eine Schiebfläche. Eine verallgemeinerte Definition von Minimalflächen ist folgende: Eine Minimalfläche ist eine Schiebfläche, deren Erzeugende isotrope Kurven sind.Reelle Minimalflächen erfüllen dann die Bedingungen
 und
und  .
.
Integraldarstellung
Die nach Karl Weierstraß benannte Darstellungsformel liefert einen Zusammenhang zwischen der Differentialgeometrie und der Funktionentheorie. Nun hat Weierstraß großen Einfluss auf das Entstehen der Funktionentheorie gehabt. Diese Darstellungsformel war einer der Gründe, warum dieser relativ neue Zweig der Mathematik ernst genommen wurde und so erfolgreich war und ist. Er hat herausgefunden, dass sich jede nicht konstante Minimalfläche
 als Integral mit den beiden holomorphen Funktionen g und h schreiben lässt. Genauer gilt für die Komponenten
als Integral mit den beiden holomorphen Funktionen g und h schreiben lässt. Genauer gilt für die Komponenten ,
,
 ,
,
 .
.
Diese Darstellungsformel ermöglicht es, mit Hilfe moderner Computeralgebrasysteme Bilder von beliebigen Minimalflächen zu erzeugen. Beispielsweise wurden einige Bilder von Minimalflächen in diesem Artikel unter Verwendung dieser Formeln mit dem Programm Maple erstellt.
Integralfreie Darstellung
Da wir gesehen haben, dass es um die Differentialgleichung H=0 zu integrieren, genügt isotrope Kurven zu bestimmen, erhalten wir für reelle Minimalflächen
die sogenannte integrallose Darstellungmit einer holomorphen Funktion f = f(w), welche der Voraussetzung
 genügen muss. Ebenen entziehen sich somit dieser Darstellung! Um nun die Bedeutung der komplexen Veränderlichen w für eine reelle Minimalfläche zu klären, liefert eine langwierige Rechnung
genügen muss. Ebenen entziehen sich somit dieser Darstellung! Um nun die Bedeutung der komplexen Veränderlichen w für eine reelle Minimalfläche zu klären, liefert eine langwierige Rechnung bzw.
bzw.  ,
,
hierbei ist
 der Einheitsnormalenvektor der Minimalfläche. Wir fassen zusammen: Durch Angabe der komplexen Zahl w bzw. 1/w ist der Einheitsnormalenvektor der Minimalfläche festgelegt. Umgekehrt hängt w bzw. 1/w lediglich von ab. Die Aussagen dieses Abschnitts sind insbesondere dem Buch von W. Blaschke und K. Leichtweiß Elementare Differentialgeometrie zu entnehmen, siehe dazu auch Literatur.
der Einheitsnormalenvektor der Minimalfläche. Wir fassen zusammen: Durch Angabe der komplexen Zahl w bzw. 1/w ist der Einheitsnormalenvektor der Minimalfläche festgelegt. Umgekehrt hängt w bzw. 1/w lediglich von ab. Die Aussagen dieses Abschnitts sind insbesondere dem Buch von W. Blaschke und K. Leichtweiß Elementare Differentialgeometrie zu entnehmen, siehe dazu auch Literatur.Bemerkungen zum Flächeninhaltsfunktional
Wir werden dieses Funktional zunächst allgemein herleiten und die Invarianz unter positiv orientierten Parametertransformationen zeigen. Schließlich werden wir die ein- und zwei-dimensionalen Spezialfälle explizit ausrechnen.
Herleitung und Parameterinvarianz
Wir beachten, dass sich unsere Minimalfläche als m-dimensionale Mannigfaltigkeit im n-dimensionalen reellen Vektorraum auffassen lässt. Das ist auf Grund des Einbettungssatzes von Nash immer möglich. Wir erklären zunächst den metrischen Tensor
mit der Determinante
 .
.
Wir erinnern uns, dass sich ein Inhalt einer m-dimensionalen Fläche als m-dimensionales Integral über die charakteristische Funktion dieser Fläche ergibt. Eine charakteristische Funktion ist überall identisch eins auf der Menge und sonst identisch null. Damit müssen wir lediglich das Oberflächenelement geeignet ausdrücken. Wir beginnen und erklären in einem festen Punkt u die Tangentialvektoren
 für
für 
weiter wählen wir Vektoren
 , so dass das System
, so dass das Systempositiv orientiert ist und die beiden Bedingungen
 und
und  für alle sinnvollen Werte von i und j erfüllt. Somit schreibt sich das Oberflächenelement
für alle sinnvollen Werte von i und j erfüllt. Somit schreibt sich das Oberflächenelement-
-
 .
.
-
Wenn wir den folgenden Satz über die Determinante beachten
- Die Determinante zweier
 -Matrizen mit
-Matrizen mit  ist
ist
 .
.
- Dabei bezeichnet
 die Teilmatrix von A, welche nur aus den Zeilen
die Teilmatrix von A, welche nur aus den Zeilen  besteht.
besteht.
Dann können wir unser Oberflächenelement in der Form
schreiben. Mit Hilfe der Transformationsformel stellen wir nun die Invarianz unter gleichsinnigen Parametertransformationen des Oberflächenelements und damit des Flächeninhaltsfunktionals fest.
Der ein- und zwei-dimensionale Inhalt
In einer Raumdimension reduziert sich dieses Funktional auf die gewöhnliche Weglänge. Es lautet
 .
.
Hat man eine zweidimensionale Fläche vorliegen, welche in den dreidimensionalen Raum eingebettet ist, erhält man mit der Identität von Lagrange:
 . Damit schreibt sich das Flächeninhaltsfunktional
. Damit schreibt sich das Flächeninhaltsfunktional .
.
Literatur
- Wilhelm Blaschke, Kurt Leichtweiß: Elementare Differentialgeometrie. Springer-Verlag, 1973 (=Grundlehren der mathematischen Wissenschaften Band 1).
- David Gilbarg, Neil S. Trudinger: Elliptic Partial Differential Equations of Second Order. Springer-Verlag, 1983 (=Grundlehren der mathematischen Wissenschaften Band 224).
- Ullrich Dierkes, Stefan Hildebrandt, Albrecht Küster, Ortwin Wohlrab: Minimal Surfaces. Springer-Verlag, 1992, 2 Bände (=Grundlehren der mathematischen Wissenschaften Band 295 und 296).
- Stefan Hildebrandt, Anthony Tromba: Kugel, Kreis und Seifenblasen, Optimale Formen in Geometrie und Natur. Birkhäuser, 1996.
- Johannes C. C. Nitsche: Vorlesungen über Minimalflächen. Springer-Verlag, 1975 (=Grundlehren der mathematischen Wissenschaften Band 199).
- Friedrich Sauvigny: Partielle Differentialgleichungen der Geometrie und der Physik. Springer-Verlag, 2004f., 2 Bände.
Weblinks














Wikimedia Foundation.