- Biegespannung
-
Die Balkentheorie beschreibt das Verhalten von Balken unter Belastung. Sie ist ein Teilgebiet der Technischen Mechanik, speziell der Festigkeitslehre, der Elastizitätstheorie und der Statik. Häufig spricht man auch exakter von der Biegetheorie des Balkens.
Zur Anwendung kommt die Balkentheorie in vielen Ingenieurwissenschaften, beispielsweise
- Bauingenieurwesen
- Maschinenbau
- Schiffbau
- Luft- und Raumfahrttechnik bzw. Flugzeugbau.
Inhaltsverzeichnis
Voraussetzungen
 Die Strich-Punkt-Linie sei die x-Achse
Die Strich-Punkt-Linie sei die x-AchseDie Balkentheorie befasst sich mit der Berechnung von Bauteilen mit folgenden Merkmalen, die als Balken bezeichnet werden:
- Ein Balken ist ein stabförmiges Tragglied, das durch Lasten längs und quer zu seiner Achse belastet werden kann. Die Reaktion des Balkens auf die Belastungen sind Längs-, Biege-, Schub-, Wölb-, Drill- und Querverformungen verbunden mit jeweils zugehörigen Schnittgrößen, zu denen die inneren Spannungen in geeigneter Weise zusammengefasst werden.
- Solange nur die Verformung in eine Richtung (y als Funktion von x) betrachtet wird, ist die Abmessung in die dritte Dimension (z) irrelevant: die Theorie gilt in diesem Sonderfall auch für eine Platte und umfasst dabei als wichtigen Anwendungsfall das Regalbrett.
- Bei einem Balken im engeren Sinne ist die Achse im unbelasteten Zustand gerade, obwohl man auch Bögen mit einer entsprechend erweiterten Form der Balkentheorie berechnen kann.
- Ein Balken im engeren Sinne besteht aus elastischem Werkstoff, beispielsweise Stahl oder Stahlbeton, obwohl man auch viele andere Werkstoffe näherungsweise so berechnen kann, als seien sie elastisch. Ein Balken verhält sich biegesteif. Seile verhalten sich näherungsweise biegeschlaff und sind deshalb keine Balken.
- Die Belastung des Balkens erfolgt quer zu seiner Achse, so dass er sich durchbiegt. Wenn das Bauteil nur längs zu seiner Achse belastet wird (Zug/Druck, Torsion) und nicht ausknickt, nennt man es nicht Balken, sondern Stab. Wenn das Bauteil zwar nur längs belastet wird, aber bei Stabilitätsversagen seitlich ausknickt, nennt man es zwar Knickstab und nicht Knickbalken, aber es wird mit einer erweiterten Form der Balkentheorie (Theorie Höherer Ordnung) berechnet.
- Im engeren Sinne versteht man unter einem Balken einen Euler-Bernoulli-Balken. Dabei gilt die Hypothese: Querschnitte, die ursprünglich rechtwinklig zur Nullinie sind, bleiben bei der Verformung eben. Bei reiner Biegung (M = const) bleiben die Querschnitte außerdem auch senkrecht auf der Nullinie, weil die Biegelinie dann ein Kreis ist und die Querschnittsebene mit dem Kreisradius zusammenfällt. In allen anderen Fällen ist die Querschnittsebene um den Schubwinkel gedreht. Dies wird z. B. durch eine allgemeinere und kompliziertere Balkentheorie zu erfassen versucht, nämlich die Theorie der Timoshenko-Balken. Diese berücksichtigt die Schubverformung der Querschnittsebene.
Die Balkentheorie bezieht sich auch auf Bauteile, die aus einzelnen Balken zusammengesetzt sind.
Grundzüge der Theorie
Näherungsschritte
Allgemein unterscheidet man
- Balkentheorie Erster Ordnung: Es wird näherungsweise am unverformten Balken ein Balkenelement betrachtet und die Kräfte und Momente bilanziert. Sie genügt fast immer.
- Balkentheorie Zweiter Ordnung: Es wird am verformten Balken ein Balkenelement betrachtet, jedoch wird das mathematische Modell linearisiert. Sie wird für Stabilitätsprobleme benötigt, sowie für große Durchbiegungen bei Neigungswinkeln bis ca. 20°.
- Balkentheorie Dritter Ordnung: Es wird am verformten Balken ein Balkenelement betrachtet, und das mathematische Modell wird nicht linearisiert. Sie wird in Sonderfällen benötigt, bei sehr großen Durchbiegungen und Neigungswinkeln über ca. 20°.
Theorie Erster Ordnung: Statik
 Statisch bestimmt gelagerter Balken
Statisch bestimmt gelagerter Balkenstatisch bestimmt
Bei statisch bestimmt gelagerten Balken lassen sich die Auflagerkräfte und Schnittgrößen aus den Gleichgewichtsbedingungen bestimmen. Statisch bestimmte Balken besitzen in Längsrichtung ein festes Auflager und ein längsbewegliches Auflager oder sind an einem Balkenende eingespannt. Als „fest“ bezeichnet man ein Auflager dann, wenn es horizontal gehalten wird und somit Horizontalkräfte übertragen kann. Ein bewegliches Auflager kann sich dagegen horizontal verschieben und somit keine Kräfte in dieser Richtung abtragen.
 Statisch unbestimmt gelagerter Balken
Statisch unbestimmt gelagerter Balkenstatisch unbestimmt (oder überbestimmt)
Bei statisch unbestimmt gelagerten Balken sind zusätzlich zu den Gleichgewichtbedingungen auch Verträglichkeitsbedingungen zu erfüllen, um die Auflagerkräfte und Schnittgrößen bestimmen zu können. Statisch unbestimmte Balken besitzen beliebig viele Auflager oder Einspannungen.
Im einfachsten Fall wird ein Balken anhand der Gleichung der Biegelinie, einer linearen inhomogenen Differentialgleichung berechnet. Sie stellt einen Zusammenhang zwischen der Durchbiegung w (in y-Richtung) und der Streckenlast (Gewicht pro Strecke) q als Funktion der Koordinate x entlang der Balkenachse her.
 .
.
Biegesteifigkeit und Biegespannung
Die Biegesteifigkeit EI setzt sich zusammen aus dem Elastizitätsmodul E des Materials und dem Flächenträgheitsmoment I des geometrisch gegebenen Querschnitts. Letzteres berechnet sich als
 .
.
Für einen Balken mit rechteckigem Querschnitt
 (in y- respektive z-Richtung) ist
(in y- respektive z-Richtung) ist .
.
Rand- und Übergangsbedingungen ergeben sich aus der Art der Auflager und bestehen aus kinematischen Randbedingungen und aus dynamischen (Kräfte und Momente betreffenden) Randbedingungen.
Für die dynamischen Randbedingungen ist relevant, welcher Zusammenhang zwischen der Durchbiegung und den Schnittlasten besteht, nämlich
Querkraft:
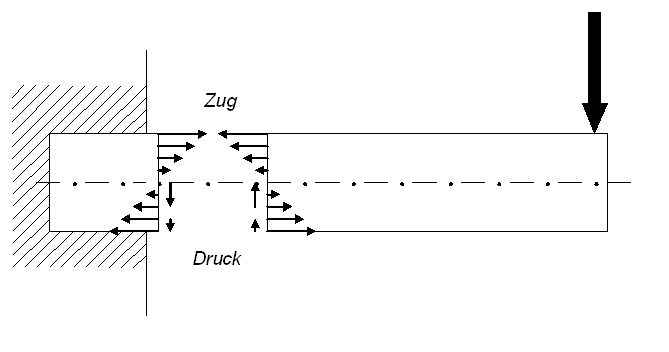
Das Biegemoment setzt sich aus Biegespannungen zusammen, dies sind in axialer Richtung wirkende Spannungen mit einer linearen Verteilung zwischen Druckfaser und Zugfaser:
Darin ist I das Flächenträgheitsmoment des Querschnitts um die Achse, um die das Biegemoment dreht. Den Kennwert I / z beim maximalen z (an der äußersten Faser des Querschnitts) nennt man auch Widerstandsmoment W. Daraus folgt ein recht bekanntes Ergebnis: die Tragfähigkeit eines Balkens ist proportional zu I / h = bh2.
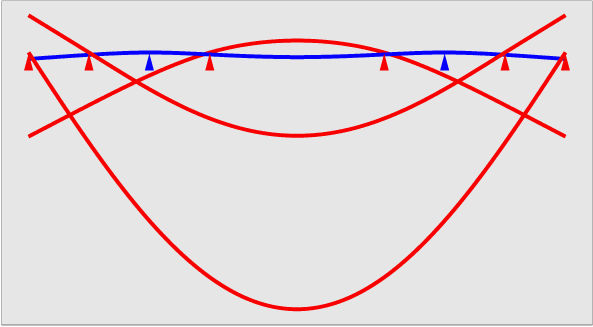
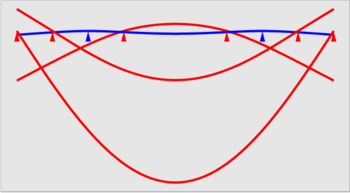 Verbiegung (stark überhöht) eines gleichmäßig belasteten Balkens für verschiedene Auflagerpositionen; blau: Lagerung in den Bessel-Punkten.
Verbiegung (stark überhöht) eines gleichmäßig belasteten Balkens für verschiedene Auflagerpositionen; blau: Lagerung in den Bessel-Punkten.Im Falle unsymmetrischer Querschnitte muss das Koordinatensystem in Richtung der Hauptträgheitsachsen gedreht werden, damit man die Biegung in beiden Richtungen getrennt voneinander berechnen kann. Beispiel: wenn ein L-Profil von oben belastet wird, kann es sich auch nach vorn oder hinten durchbiegen. Nur in Richtung einer Hauptträgheitsachse biegt sich ein Balken in Richtung der Belastung und nicht quer dazu.
Wie stark sich ein Balken verbiegt, hängt ferner sehr stark von der Position der Auflager ab; bei gleichmäßiger Belastung q(x)=const erhält man aus der Differentialgleichung als optimale Lagerpositionen die Bessel-Punkte.
Die Biegespannung im Besonderen beschreibt die Kraft, welche auf den Querschnitt (z. B. eines Balkens) wirkt, der senkrecht zu seiner Ausdehnungsrichtung belastet wird.
Die Normalspannung im Balkenquerschnitt ist:
Ist das Moment positiv, treten für z > 0 Zug- und für z < 0 Druckspannungen auf. Die betragsmäßig größte Spannung tritt demnach in der äußersten Faser zmax auf.
Das Widerstandsmoment W gibt das entgegenwirken zur Spannung
 an
an(I beschreibt das Flächenträgheitsmoment)
Demnach ergibt sich für die maximale Biegespannung:
Je größer das Widerstandsmoment, desto kleiner ist somit die Biegespannung.
Theorie Erster Ordnung: Dynamik
Bis hier wurde nur die Statik behandelt. Die Balkendynamik, etwa um Balkenschwingungen zu berechnen, basiert auf der Gleichung
Das Problem hängt hier nicht nur vom Ort x, sondern zusätzlich von der Zeit t ab. Es kommen zwei weitere Parameter des Balkens hinzu, nämlich die Massenverteilung m (in kg/m) und die Strukturdämpfung b. Wenn das Bauteil unter Wasser schwingt, beinhaltet m auch die hydrodynamische Masse, und in b kann man eine linearisierte Form der hydrodynamischen Dämpfung einbeziehen, siehe Morison-Gleichung.
Theorie Zweiter Ordnung: Knickstab
Während bisher die Kräfte und Momente näherungsweise am unverformten Bauteil bilanziert wurden, ist es im Falle von Knickstäben erforderlich, ein Balkenelement im verformten Zustand zu betrachten. Knickstab-Berechnungen basieren auf der Gleichung
und zwar im einfachsten Fall mit q = 0. Hinzu kommt die axial im Knickstab wirkende Druckkraft N, die je nach Randbedingungen die Knicklast nicht überschreiten darf, damit der Stab nicht ausknickt.
Theorie Dritter Ordnung
Ein Anwendungsfall, bei dem Balkentheorie Dritter Ordnung nötig wird, ist z. B. das Verlegen von Offshore-Pipelines von einem Wasserfahrzeug aus in großen Wassertiefen, hier nur als ebener statischer Fall wiedergegeben. Ein sehr langer Rohrstrang hängt vom Fahrzeug zum Meeresboden herunter, ist gekrümmt wie ein Seil, jedoch biegesteif. Die nichtlineare Differentialgleichung lautet hier
Die Koordinate heißt hier nicht mehr x, sondern s. Das ist die Bogenlänge entlang der Pipeline. H ist die entlang der Pipeline konstante Horizontalkomponente der Schnittkraft (Horizontalzug) und wird dadurch beeinflusst, wie stark das Fahrzeug mit seinen Ankern und dem Tensioner an der Pipeline zieht, damit sie nicht durchsackt und bricht. Der Tensioner ist eine Vorrichtung aus zwei Raupenketten, die die Pipeline an Bord einspannt und sie unter Zugbelastung hält. w ist das Gewicht pro Länge abzüglich Auftrieb. V ist eine Rechengröße, die man sich als kleine Bodenauflagerkraft vorstellen kann. Die Geometrie wird durch den Neigungswinkel
 beschrieben, der mit der Horizontalkoordinate x(s) und der Vertikalkoordinate z(s) in folgendem Zusammenhang steht:
beschrieben, der mit der Horizontalkoordinate x(s) und der Vertikalkoordinate z(s) in folgendem Zusammenhang steht:Geschichte
Nach qualitativen Vorarbeiten von Leonardo da Vinci wurde die Balkentheorie von Galileo Galilei begründet. Er ordnete die Neutralfläche allerdings fehlerhaft an der Unterseite des Balkens an. Knickstäbe wurden von Leonhard Euler betrachtet.
„Väter“ der modernen Biegetheorie von Leonardo da Vinci bis Navier:
- Leonardo da Vinci (1452–1519) – Qualitative Aussagen zur Tragfähigkeit
- Galileo Galilei (1564–1642) – Discorsi … – Galileisches Problem
- Edme Mariotte (1620–1684) – Spannungsverteilung – „Achse des Gleichgewichts“
- Robert Hooke (1635–1703) – Hookesche Gesetz, Proportionalität Dehnung/Spannung
- Isaac Newton (1642–1727) – Gleichgewicht der Kräfte, Infinitesimalrechnung
- Gottfried Wilhelm Leibniz (1646–1716) – Widerstandsmomente, Infinitesimalrechnung
- Jakob Bernoulli (1655–1705) – Zusammenhang zwischen Belastung und Biegung
- Antoine Parent (1666–1716) – Dreieckige Verteilung der Zugspannung
- Jakob Leupold (1674–1727) – Durchbiegung und Tragfähigkeit
- Leonhard Euler (1707–1783) – Untersuchung elastischer Linien, Knickgleichung
- Charles Augustin de Coulomb (1736–1806) – Endgültige Lösung des Biegeproblems
- Claude Louis Marie Henri Navier (1785–1836) – Biegetheorie, Elastizität, Elastomechanik, Baustatik
Literatur
- Gross, Hauger, Schröder, Wall: Technische Mechanik. Band 1–3. Springer, Berlin 2006 / 2007.
- István Szabó: Einführung in die Technische Mechanik. Springer, Berlin 2001, ISBN 3-540-67653-8
- Peter Gummert, Karl-August Reckling: Mechanik. Vieweg, Braunschweig 1994, ISBN 3-528-28904-X
Siehe auch
Weblinks









Wikimedia Foundation.