- Druckspannung
-
Physikalische Größe Name mechanische Spannung Größenart mechanische Spannung Formelzeichen der Größe σ, τ [1] Größen- und
Einheiten-
systemEinheit Dimension SI Pascal (Pa) N/m2 M·L−1·T−2 Anmerkungen - für die Schubspannung
Siehe auch: Druck p, Vergleichsspannung, Fließspannung, Eigenspannung Die mechanische Spannung σ ist ein Begriff aus der Festigkeitslehre, einem Teilgebiet der technischen Mechanik. Sie ist die Kraft pro Flächeneinheit, die in einer gedachten Schnittfläche durch einen Körper, eine Flüssigkeit oder ein Gas wirkt.
Allgemein ist die Spannung σ (engl. stress, fr. contrainte) der Betrag der Kraft F (engl. force) pro Flächeninhalt A (engl. area):
Die mechanische Spannung hat dieselbe physikalische Dimension wie der Druck, nämlich Kraft je Fläche. Der Druck stellt einen Spezialfall der mechanischen Spannung dar.
Als Maßeinheit für den Druck sind in der Praxis das Pascal bzw. Newton pro Quadratmeter (1 Pa = 1 N/m2), sowie das davon abgeleitete Megapascal bzw. Newton pro Quadratmillimeter (1 MPa = 106 Pa = 1 N/mm2) üblich.
Inhaltsverzeichnis
Normal- und Biegespannung
Bei einer Normalbelastung ist die Spannung auf der Fläche gleichmäßig verteilt, bei einer Biegebelastung ergibt sich ein Spannungsverlauf, und die Biegespannung ist der Maximalwert:
Die Normalspannung, d. h. die Spannung bei Normalkraftbeanspruchung (Zug/Druck), ergibt sich aus:
 ,
,
wobei
 die Kraft in Richtung der Flächennormale und A der Flächeninhalt ist.
die Kraft in Richtung der Flächennormale und A der Flächeninhalt ist.Die Biegespannung, dh. die Spannung bei Momentenbeanspruchung (Biegung), ergibt sich aus:
 ,
,
wobei
 das Biegemoment, I das Flächenträgheitsmoment, z der Abstand vom Querschnittsschwerpunkt zur Randfaser und W das Widerstandsmoment ist.
das Biegemoment, I das Flächenträgheitsmoment, z der Abstand vom Querschnittsschwerpunkt zur Randfaser und W das Widerstandsmoment ist.
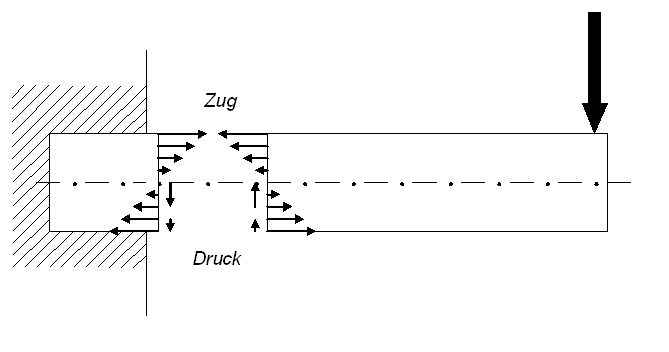
Die folgende Skizze verdeutlicht dies an einem Kragträger: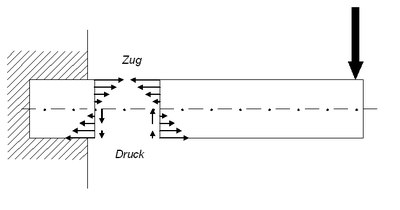
Als Vektor hat sie drei Komponenten, und sie hängt von der Orientierung der Schnittfläche ab. Der Richtungssinn ist erst dann definiert, wenn man definiert, welche Seite der Schnittfläche man betrachtet, denn die Spannung ist die Kraft pro Flächeneinheit, die das in Gedanken weggeschnittene Material auf das verbliebene Material ausübt. Sie ist also in beiden gegenüberliegenden Schnittufern entgegengesetzt gerichtet.
Spannung und Spannungstensor
Die an einer bestimmten Stelle wirkenden Spannungen werden in ihrer Gesamtheit durch die Spannungen in drei Schnittflächen beschrieben, die sich an der Stelle kreuzen, also durch drei Vektoren mit je drei Komponenten; diese bilden zusammengenommen den Spannungstensor.
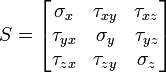
Die einfachste Darstellung hat der Spannungstensor, wenn man die drei Schnittflächen jeweils senkrecht zu einer Richtung eines kartesischen Koordinatensystems wählt. Die drei Kräfte in den drei Schnittflächen entsprechen den Zeilen der folgenden Matrix:
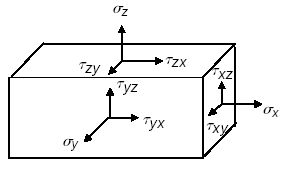
Die Bedeutung zeigt folgende Skizze eines herausgeschnittenen sehr kleinen Volumenelements:
Schub-, Druck- und Zugspannung
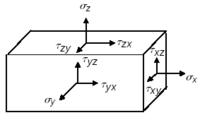
Die Diagonalelemente σ stellen dabei die Normalspannungen dar, also die Kräfte die senkrecht zur Fläche wirken, sie werden je nach Richtung Zugspannung oder Druckspannung (und deren skalare Größe Druck) genannt. Die nichtdiagonalen Elemente τ werden als Schubspannungen bezeichnet. Sie wirken tangential zur Fläche, stellen also eine Belastung auf Scherung dar.
Im Doppelindex beschreibt der erste Index, in welche Richtung der äußere Normaleneinheitsvektor der Schnittfläche zeigt und der zweite Index, in welcher Richtung die Spannung wirkt.
Der Schubspannungsverlauf dient der Veranschaulichung der auftretenden Schubspannungen zur Bezugsachse innerhalb eines mit einer Querkraft belasteten Profils. Greift die Querkraft außerhalb des Schubmittelpunktes an, tritt Torsion auf.
Hauptspannung und Hauptspannungsrichtung
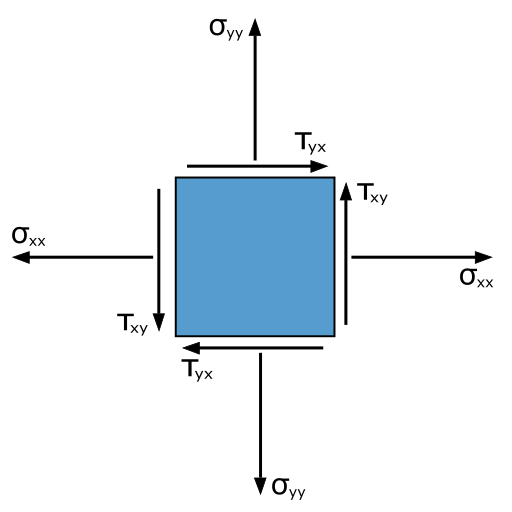
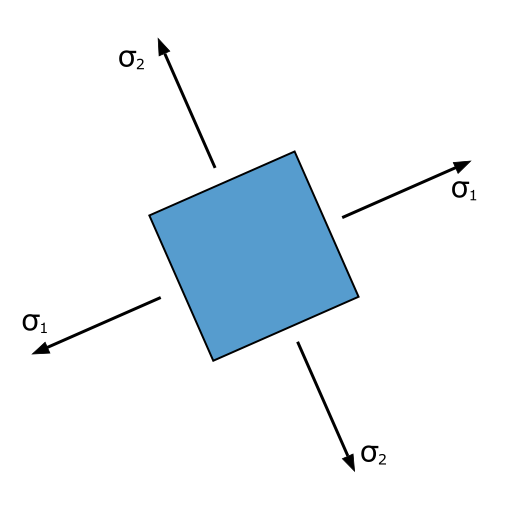
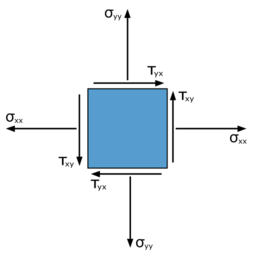 Ebener Spannungszustand
Ebener Spannungszustand Hauptspannungen im ebenen Spannungszustand
Hauptspannungen im ebenen SpannungszustandDie Tensorrechnung erlaubt, den Spannungszustand zunächst unabhängig von einem bestimmten Koordinatensystem zu beschreiben und erst nach einer Herleitung des jeweiligen Berechnungsverfahrens die Komponentengleichungen den geometrischen Eigenschaften des Körpers anzupassen, beispielsweise in Zylinderkoordinaten. In der Tensorrechnung definiert man als Spannungstensor denjenigen Tensor zweiter Stufe, der skalar multipliziert mit der äußeren Flächennormalen einer Schnittfläche den Kraftvektor pro Flächeneinheit ergibt.
Jeder Spannungszustand lässt sich durch Hauptachsentransformation in ein Koordinatensystem umrechnen, in dem alle Schubspannungen verschwinden. Wenn man in diesem Koordinatensystem die drei Normalspannungen zu einem Vektor zusammenfasst, kann man diesen in zwei Komponenten zerlegen:
- Die Komponente quer zur Raumdiagonalen ist ein Maß dafür, wie groß in anderen Schnittrichtungen die Schubspannungen je nach Schnittrichtung maximal werden können. Allein dieser Anteil ist bei der Berechnung von Stahlkonstruktionen relevant. Er entspricht der Vergleichsspannung nach Gestaltsänderungshypothese. Wenn er die Fließspannung der jeweiligen Stahlsorte überschreitet, verformt sich der Stahl plastisch.
- Die Komponente in Richtung der Raumdiagonalen beschreibt den Druck; dieser Anteil ist bei der Berechnung von Stahlkonstruktionen irrelevant, da er in keinerlei Schnittrichtung zu Schubspannungen führt, und insofern auch zu keiner plastischen Verformung.
Die Hauptspannungen lassen sich durch das Lösen der Gleichung det(S − σE) = 0 errechnen, wobei E die 3×3-Einheitsmatrix ist. Ausmultiplizieren der Determinante führt auf eine Gleichung dritten Grades, deren Lösungen σ1, σ2 und σ3 die gesuchten Hauptspannungen darstellen. Sie sind die Eigenwerte der Spannungsmatrix S.
Die jeweilige Hauptspannungsrichtung ergibt sich aus der Gleichung
 , wobei für σ die errechnete Hauptspannung eingesetzt wird. Die Lösungen
, wobei für σ die errechnete Hauptspannung eingesetzt wird. Die Lösungen  sind Eigenvektoren der Spannungsmatrix S und geben die Richtung der Spannungen an. In normierter Form bilden sie eine Orthonormalbasis des 3-dimensionalen Raumes, sofern keine der Hauptspannungen gleich Null ist.
sind Eigenvektoren der Spannungsmatrix S und geben die Richtung der Spannungen an. In normierter Form bilden sie eine Orthonormalbasis des 3-dimensionalen Raumes, sofern keine der Hauptspannungen gleich Null ist.Die Kurvenschar der Hauptspannungslinien nennt man Trajektorie. Eine geometrische Darstellung der Spannungskomponenten in verschiedenen Koordinatenrichtungen im ebenen Spannungszustand wird durch den Mohrschen Spannungskreis gegeben.
Den Zusammenhang zur Deformation stellt für elastische Verformungen das Hookesche Gesetz her. Wichtigste Materialkonstanten sind dabei Elastizitätsmodul und Querkontraktionszahl. Die plastische Deformation beschreiben die Fließbedingung, das Fließgesetz und das Verfestigungsgesetz. Den Zusammenhang zur Verformungsgeschwindigkeit in viskosen Flüssigkeiten stellt Newton's Zähigkeitsansatz her. Wichtigste Materialkonstante ist darin die dynamische Viskosität.
Das Deformationsverhalten eines Körpers wird durch den Zusammenhang zwischen Spannungs- und Deformationstensor beschrieben. Diese Beziehung wird rheologisches Gesetz genannt und ist eine Materialeigenschaft des Körpers. Die Rheologie beschäftigt sich mit dem Fließen und der Deformation von Körpern.
Die ohne außen an den Körper angreifende Kräfte auftretenden Spannungen werden auch Eigenspannungen genannt.
Ein hydrostatischer Spannungszustand liegt vor, wenn die drei Hauptspannungen gleich sind.
Die Spannung in Gasen wird im Boyle-Mariotte-Gesetz und im Gay-Lussac-Gesetz beschrieben.
Siehe auch

Wikimedia Foundation.