- Einspurmodell
-
Das lineare Einspurmodell ist die einfachste Modellvorstellung zur Erklärung der stationären und instationären Querdynamik von 2-spurigen Kraftfahrzeugen. Das Einspurmodell wurde von Riekert und Schunck [1] bereits 1940 entwickelt und für die Analyse des Lenk- und Störverhaltens bei Seitenwind eingesetzt. Bis heute ist das Einspurmodell die unverzichtbare Theoriegrundlage für Fahrzeug-Ingenieure mit dem Fachgebiet Fahrdynamik. Die weiteste Verbreitung hat das lineare Einspurmodell in ESP-Steuergeräten gefunden, wo es zur Fahrerwunsch-Erkennung eingesetzt wird.
Da sich PKW auf trockener Fahrbahn bis zu einer Querbeschleunigung von etwa 4 m/s2 noch weitgehend linear verhalten, kann das querdynamische Verhalten in diesem Bereich durch das lineare Einspurmodell näherungsweise erklärt werden.
Neben dem linearen Einspurmodell gibt es Einspurmodelle mit verschiedenen Detaillierungsstufen z. B. nichtlineare Einspurmodelle oder Einspurmodelle mit zusätzlichem Wankfreiheitsgrad.[2]
Im Folgenden wird auf das lineare Einspurmodell mit zwei Freiheitsgraden (Giergeschwindigkeit, Schwimmwinkel) eingegangen. Es wird der Spezialfall eines an der Vorderachse gelenkten Fahrzeugs ohne äußere Störungen behandelt.
Inhaltsverzeichnis
Anwendungsgebiete
- Plausibilisierung von Versuchs- bzw. Simulationsergebnissen.
- Fahrerwunscherkennung bei Fahrdynamikregelsystemen.
- Identifikation von Kenngrößen aus Messdaten (z. B. Eigenfrequenz, Lehr'sche Dämpfung).
- Trennung von Lenk- und Störanteilen (z. B. Seitenwind) aus Messdaten.
- Stabilitätsbetrachtungen im geschlossenen Regelkreis.
- Entwicklung von Fahrdynamikregelsystemen z. B. Hinterachslenkung.
Annahmen
- Beide Räder einer Achse werden zu einem Rad zusammengefasst.
- Kinematik und Elastokinematik der Achse werden in den Reifen gepackt.
- Lineares Reifenverhalten.
- Reifenrückstellmomente werden vernachlässigt.
- Kein Reifeneinlaufverhalten.
- Kein Wanken.
- Die Änderung der Fahrgeschwindigkeit wird quasistationär behandelt.
- Kleine Winkel cos(φ) ≈ 1, sin(φ) ≈ φ
Kinematische Beziehungen
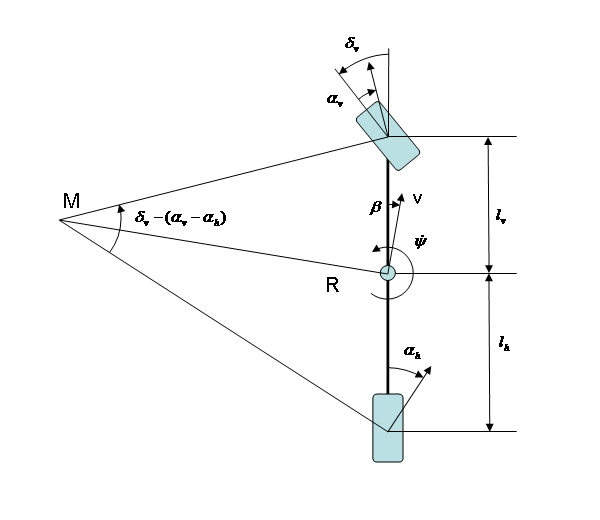
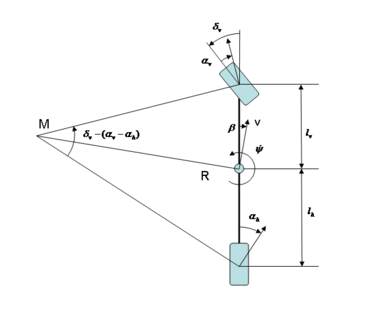 Kinematische Beziehungen beim Einspurmodell
Kinematische Beziehungen beim Einspurmodell
Die ebene Bewegung eines Starrkörpers kann stets als Drehung um den Momentanpol M aufgefasst werden. Für die Geschwindigkeit im Schwerpunkt gilt daher:
 ,
,
mit
 : Giergeschwindigkeit.
: Giergeschwindigkeit.Die Geschwindigkeitsvektoren der Radaufstandspunkte stehen senkrecht auf den Polstrahlen. Der von den Polstrahlen eingeschlossene Winkel ist somit der Differenzwinkel der Geschwindigkeitsvektoren von Vorderachse und Hinterachse.
Unter der Voraussetzung kleiner Winkel ist der eingeschlossene Winkel auch das Verhältnis von Radstand l und Polabstand R. Für den Fall eines nur an der Vorderachse gelenkten Fahrzeugs ist der Vorderachseinschlag δv gleich dem Lenkwinkel δ, so dass sich folgender Zusammenhang ergibt:
Der Lenkwinkel setzt sich aus dem Ackermannwinkel (l/R) und der Schräglaufwinkeldifferenz zwischen Vorderachse und Hinterachse zusammen.
Die Schräglaufwinkel lassen sich aus den Freiheitsgraden (Zustandsgrößen) Giergeschwindigkeit und Schwimmwinkel sowie dem Lenkwinkel berechnen.
Kräfte und Momente
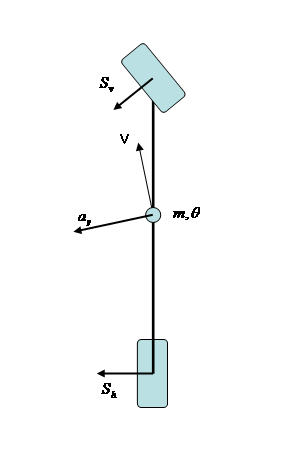
 Kräfte am Einspurmodell
Kräfte am EinspurmodellVernachlässigt man Windkräfte und Momente, so wirken als äußere Kräfte die Achsseitenkräfte auf das Fahrzeug ein. Diese sind beim linearen Einspurmodell proportional zu den Schräglaufwinkeln.
Bei gegebenen Kräften lauten die Bewegungsgleichungen (Impulssatz und Drallsatz):
Mit ay wird die Zentripetalbeschleunigung bzw. Radialbeschleunigung bezeichnet, die senkrecht zum Geschwindigkeitsvektor im Schwerpunkt in Richtung Momentanpol weist.
In den Freiheitsgraden des Einspurmodells ausgedrückt gilt für die Radialbeschleunigung:
Stationäres Verhalten
Bei stationärer Fahrt wird das Moment der äußeren Kräfte bezüglich des Schwerpunkts zu Null. Es gilt also:
Kombiniert man die letzte Gleichung mit dem Impulssatz, so können die Seitenkräfte in Abhängigkeit der Radialbeschleunigung ausgedrückt werden:
Eingesetzt in die aus den kinematischen Bedingungen gewonnene Gleichung für den Lenkwinkel ergibt sich:
Der Klammerausdruck wird als Eigenlenkgradient (EG) bezeichnet. An Stelle der kompakten Schreibweise für den EG (oben), kann auch eine Gleichung verwendet werden, bei der nur direkte Parameter eingehen.
Der stationäre Lenkwinkel setzt sich aus einem Anteil der nur von Radstand und Radius abhängt (Ackermannwinkel) und einem Anteil proportional zur Radialbeschleunigung zusammen. Das Eigenlenkverhalten wird entsprechend dem Vorzeichen des EG unterschieden:
- EG > 0: untersteuernd
- EG = 0: neutral
- EG < 0: übersteuernd
Alle heutigen PKW sind untersteuernd ausgelegt. Übersteuernde Fahrzeuge können instabil werden, wie noch gezeigt wird.
Gierverstärkung
Die Gierverstärkung ist das Verhältnis zwischen stationärer Giergeschwindigkeit und Lenkradwinkel.
Mit
 (iS Gesamtlenkübersetzung) gilt für den stationären Lenkradwinkel:
(iS Gesamtlenkübersetzung) gilt für den stationären Lenkradwinkel:Bei stationärer Kreisfahrt gilt
 , da die Schwimmwinkelgeschwindigkeit zu Null wird. Der Radius kann ebenfalls in ausgedrückt werden. In die obige Gleichung eingesetzt, ergibt sich für die Gierverstärkung.
, da die Schwimmwinkelgeschwindigkeit zu Null wird. Der Radius kann ebenfalls in ausgedrückt werden. In die obige Gleichung eingesetzt, ergibt sich für die Gierverstärkung.
Das Bild zeigt mögliche Verläufe je nach Vorzeichen des Eigenlenkgradienten. Untersteuernde Fahrzeuge haben ein Maximum der Gierverstärkung, welches bei der charakteristischen Geschwindigkeit auftritt.
Im Fall EG<0 kann der Nenner der Gierverstärkung Null werden. Die Geschwindigkeit, bei der dies der Fall ist, wird als kritische Geschwindigkeit bezeichnet. Die Gierverstärkung wächst an dieser Stelle über alle Grenzen, das Fahrzeug wird instabil.
Die maximale Gierverstärkung bezogen auf den Lenkradwinkel hat für untersteuernde Fahrzeuge den Wert:
Die meisten PKW haben maximale Gierverstärkungen im Bereich zwischen 0.2 1/s und 0.4 1/s. Als Kennwert beschreibt die maximale Gierverstärkung den Agilitätseindruck eines Fahrzeugs bei mittleren Geschwindigkeiten (Landstraße). Die charakteristische Geschwindigkeit liegt bei den meisten PKW im Bereich zwischen etwa 70 km/h und 110 km/h.
Die Anfangssteigung der Gierverstärkung über der Fahrgeschwindigkeit wird als statische Lenkempfindlichkeit bezeichnet. Sie ist ein Maß für die Wendigkeit eines Fahrzeugs bei geringen Geschwindigkeiten. Sie hat den Wert:
und hängt nur von Gesamtlenkübersetzung und Radstand ab. Fahrzeuge mit kurzem Radstand werden daher als wendiger bei geringen Geschwindigkeiten empfunden.
Schwimmwinkel
Der Schwimmwinkel lässt sich bereits aus den kinematischen Beziehungen ableiten. Es gilt:
Der Ausdruck mh/ch wird als Schwimmwinkelgradient (SG) bezeichnet. Kleine Schwimmwinkelgradienten sind die Voraussetzung für sicheres, stabiles Fahrverhalten. Haupteinflussgröße ist die Wahl der Bereifung an der Hinterachse.
Analog zur Gierverstärkung lässt sich auch eine Schwimmwinkelverstärkung berechnen. Nach einigen Umformungen ergibt sich:
Zu hohe Schwimmwinkelverstärkungen sind fahrdynamisch unerwünscht, da sie zu einem unsicheren Fahrverhalten bei hohen Geschwindigkeiten beitragen.
Dynamisches Verhalten
Beim dynamischen Verhalten interessieren Ein- bzw. Ausschwingvorgänge, sowie die Antwort auf bestimmte Testsignale. Die wichtigsten sind der Lenkwinkelsprung und die sinusförmige Anregung. Diese Vorgänge sind durch ihre Übertragungsfunktionen charakterisiert.
Zur Berechnung dieser Eigenschaften empfiehlt es sich, auf die Zustandsraumdarstellung überzugehen.
 , mit:
, mit:  und
und 
Eigenfrequenz und Dämpfung
Ein- bzw. Ausschwingvorgänge werden von Eigenfrequenz und Dämpfung bestimmt. Diese lassen sich mit Hilfe der Eigenwerte berechnen. Die Eigenwerte ergeben sich aus dem charakteristischen Polynom [3]:
Ausgeschrieben:
Mit der Lösung:
Das Stabilitätskriterium nach Hurwitz besagt, dass alle Koeffizienten des Polynoms positiv sein müssen. Nur der konstante Term kann negativ werden. Daraus folgt:
In den Fahrzeugparametern ausgedrückt:
Die Stabilitätsbedingung des Einspurmodells lautet somit:
Diese Bedingung wurde bereits bei der kritischen Geschwindigkeit abgeleitet. Die stationäre Kenngröße Eigenlenkgradient ist somit zugleich auch ein wichtiges Stabilitätsmaß.
Übliche PKW haben bei geringen Fahrgeschwindigkeiten reelle Eigenwerte, bei mittleren bis hohen Fahrgeschwindigkeiten konjugiert komplexe Eigenwerte. Bei fahrdynamisch relevanten Fahrgeschwindigkeiten kann man vom konjugiert komplexen Fall ausgehen. Die Eigenwerte können dann wie folgt interpretiert werden:
Dabei sind:
- ω0: ungedämpfte Eigenkreisfrequenz
- ωD: gedämpfte Eigenkreisfrequenz
- D: Lehr'sches Dämpfungsmaß
- ω0
 D: Abklingkonstante
D: Abklingkonstante
Durch Vergleich mit den Eigenwerten ergibt sich:
Gegeben seien folgende Fahrzeugdaten[4]:
Bezeichnung Formelzeichen Größe Maßeinheit Masse m 1550 kg Gierträgheitsmoment θ 2800 kg m2 Abstand Schwerpunkt - Vorderachse lv 1.344 m Abstand Schwerpunkt - Hinterachse lh 1.456 m Schräglaufsteifigkeit Vorderachse cv 75 000 N/rad Schräglaufsteifigkeit Hinterachse ch 150 000 N/rad Gesamtlenkübersetzung iS 16 - 
Damit ergeben sich die im Bild gezeigten Eigenwerte in Abhängigkeit der Fahrgeschwindigkeit. Aus den Eigenwerten können Eigenfrequenzen und Dämpfung berechnet werden. Wünschenswert sind hohe Eigenfrequenzen und hohe Dämpfungen, was sich aber unter den Randbedingungen der Fahrzeugabstimmung nicht widerspruchsfrei realisieren lässt.

Übertragungsverhalten
Alle interessierenden Größen (Ausgangsgrößen) lassen sich mit Hilfe der Zustandsgrößen und dem Eingang Lenkradwinkel berechnen. Dazu wird die Laplace-Transformation benutzt (s komplexe Variable). Aus Gründen der Vereinfachung werden im Bild- und im Zeitbereich die selben Symbole verwendet.
Als Beispiel sei die Querbeschleunigung genannt, deren Gleichung in Kräfte und Momente schon gezeigt wurde. Die Matrizen C und D lauten dann:
 ,
, 
Mit:
Dabei ist
 der Vektor der Übertragungsfunktionen von Schwimmwinkel und Giergeschwindigkeit.
der Vektor der Übertragungsfunktionen von Schwimmwinkel und Giergeschwindigkeit.Es lässt sich zeigen, dass jede Übertragungsfunktion auf die Form:
 gebracht werden kann.
gebracht werden kann.
Das Nennerpolynom ist bei allen Übertragungsfunktionen identisch und hat die Form:
Man kann die Übertragungsfunktionen mit Hilfe der Fahrzeugparameter analytisch berechnen. So lässt sich z.B. die Übertragungsfunktion der Giergeschwindigkeit auf folgende Form bringen:.
Der Verstärkungsfaktor ist die bereits abgeleitete Gierverstärkung. Die Zählerzeitkonstante berechnet sich zu:
und entspricht somit dem Produkt aus Fahrgeschwindigkeit und Schwimmwinkelgradient.
Frequenzgang
Setzt man die komplexe Variable s zu:
 , so erhält man aus den Übertragungsfunktionen den Frequenzgang[5]. Der Frequenzgang ist eine komplexe Funktion von ω. Aus dem Betrag erhält man des Amplitudengang, aus dem Winkel den Phasengang. Die Frequenzgänge werden am einfachsten im Rechner bestimmt, sie können aber auch in Abhängigkeit der Fahrzeugparameter angegeben werden.
, so erhält man aus den Übertragungsfunktionen den Frequenzgang[5]. Der Frequenzgang ist eine komplexe Funktion von ω. Aus dem Betrag erhält man des Amplitudengang, aus dem Winkel den Phasengang. Die Frequenzgänge werden am einfachsten im Rechner bestimmt, sie können aber auch in Abhängigkeit der Fahrzeugparameter angegeben werden.Am häufigsten werden die Frequenzgänge von Giergeschwindigkeit und Querbeschleunigung berechnet bzw. im Fahrbetrieb gemessen. Bei der Messung im Fahrzeug ist zu berücksichtigen, dass die Beschleunigung ortsabhängig ist und damit vom Messort zum Schwerpunkt umgerechnet werden muss.
Mit den Fahrzeugdaten aus obiger Tabelle zeigen die Frequenzgänge von Giergeschwindigkeit und Querbeschleunigung eine starke Abhängigkeit von der Fahrgeschwindigkeit.

Die starke Überhöhung im Amplitudengang der Giergeschwindigkeit ist neben der abnehmenden Dämpfung über der Fahrgeschwindigkeit auch mit der Zählerzeitkonstanten zu erklären. Eine wirksame Maßnahme zur Verbesserung der dynamischen Eigenschaften ist daher ein möglichst kleiner Schwimmwinkelgradient.
Mathematische Herleitung
Inverse einer Matrix
Das Produkt einer Matrix mit ihrer Inversen ergibt die Einheitsmatrix:
Im Fall der 2x2-Matrix lässt sich die Inverse einfach angeben:
mit folgt:
folgt: 
Mit det(A) wird die Determinante der Matrix A bezeichnet. Sie berechnet sich für den Fall der 2x2-Matrix zu:
Bewegungsgleichungen
Die Bewegungsgleichungen lauten ausgedrückt in den Zustandsgrößen:
Die oben bereits eingeführten Matrizen lauten daher:
In Zustandsraumdarstellung:
Stationäre Fahrzeugreaktionen
Bei stationärer Fahrt werden die Ableitungen der Zustandsgrößen zu Null. Die Zustandsgrößen berechnen sich somit zu:
Ausgedrückt in den Komponenten der Matrizen A und B:
Nach einigen Umformungen ergibt sich:
Berechnung der Übertragungsfunktionen
Ausgehend von der Gleichung:
Ausgedrückt in den Komponenten der Matrizen A und B:
Mit:
Mit den zuvor berechneten Verstärkungen erhält man:
Literatur
- Zomotor, Adam: Fahrwerktechnik: Fahrverhalten; Vogel Buchverlag Würzburg 1987; ISBN 3-8023-0774-7
- Mitschke, M., Wallentowitz, H.: Dynamik der Kraftfahrzeuge, 4. Auflage, 2004; ISBN 978-3-540-42011-8
Einzelnachweise
- ↑ P. Riekert, T. E. Schunck: Zur Fahrmechanik des gummibereiften Kraftfahrzeugs, Ingenieur-Archiv, 11, 1940, S. 210-224.
- ↑ L. Diebold, W. Schindler, et al.: Einspurmodell für die Fahrdynamiksimulation und -analyse, ATZ online, Ausgabe 2006-11.
- ↑ C. Rill: Fahrzeugdynamik. S. 59-61. (PDF-Datei;1.73 MB)
- ↑ Mitschke, Manfred: Dynamik der Kraftfahrzeuge; Springer-Verlag 2004; ISBN 3-540-42011-8
- ↑ Otto Föllinger: Regelungstechnik, 5. verbesserte Auflage, Hüthig-Verlag 1985.
Kategorien:- Fahrzeugtechnik
- Fahrzeuglenkung
- Systemdarstellung














































Wikimedia Foundation.