- Autopilot
-
Ein Autopilot (A/P, auch „Steuerungsautomat“) ist eine automatische Steuerungsanlage in Flugzeugen und in Wasserfahrzeugen. Ebenso ermöglicht er die selbsttätige Steuerung von unbemannten Luftfahrzeugen (UAV), Raketen oder Satelliten.
Autopiloten in Flugzeugen sind computergesteuerte Mess- und Regelsysteme zur Stabilisierung des Fluges und zu seiner planmäßigen Navigation. Bei größeren Flugzeugen im Linien- und Charterflug greift der Autopilot dabei auf den digitalen Flugplan zurück, der im Flight Management System (FMS) gespeichert ist.
Autopiloten auf Schiffen übernehmen die Steuerung nach einem festen Kurs, nach einer vorgegebenen Route (Wegepunkt-Liste) oder bei Segelschiffen nach dem Wind (Windfahnensteuerung). Auf größeren Schiffen sind sie in ein umfassendes elektronisches Navigationssystem (ECDIS) integriert.
 Bild 1: Autopilot älterer Bauart in einer PA 24 Comanche
Bild 1: Autopilot älterer Bauart in einer PA 24 Comanche
Schiffe
Steuerautomat
 Autopilot auf einem Schiff
Autopilot auf einem SchiffDer Autopilot berechnet aus verschiedenen Datenquellen die erforderliche Kurskorrektur. Gemessen wird der gesteuerte Kurs (Kompasskurs oder Kurs über Grund), der mit dem vorgegebenen Kurs über Grund verglichen wird. Aus dem Unterschied wird ein Steuersignal gebildet, das mechanisch oder hydraulisch auf die Steueranlage wirkt und über das Ruderblatt das Schiff zu einer Kursänderung bringt.
Moderne Geräte bestimmen den Kurs des Schiffes mit einem Kreiselkompass und/oder über GPS. Sie berücksichtigen auch Schlinger- und Schlierbewegungen durch Seegang und Windböen, Winddrehungen, Strömungen (Abdrift: Unterschied zwischen Kurs durch Wasser und Kurs über Grund) und Veränderungen des Erdmagnetfeldes. Über eine Wegpunktliste oder per Mausklick direkt auf der Seekarte können Routen eingegeben werden, die dann vom Autopiloten automatisch abgefahren werden. Beim Erreichen eines Wegpunktes erfolgt eine akustische Information und das Gerät schaltet automatisch auf den nächsten Wegpunkt weiter.
Auf großen Schiffen ist der Autopilot ein integrierter Bestandteil in einem umfassenden elektronisches Navigationssystem (ECDIS), zu dem auch Echolot, Radar, AIS, elektronische Seekarte und vieles mehr gehören.
Schwerwiegende Folgen können falsch programmierte oder „aus dem Ruder“ laufende Autopiloten nach sich ziehen. Letzteres tritt insbesondere bei zu schwach dimensionierten Systemen auf, beziehungsweise bei besonders heftigen Wellen und Winden oder bei Segelkursen vor dem Wind, wenn die Regelautomatik zu schwach oder zu stark reagiert.
Windfahnensteuerung
 Mechanische Windfahnen-Selbststeueranlage im Betrieb
Mechanische Windfahnen-Selbststeueranlage im Betrieb- mechanische Windfahnensteuerung
Die mechanische Windfahnensteuerung nutzt eine Windfahne am Heck des Schiffes, mit der die Windrichtung relativ zum Schiff gemessen wird. Sie reagiert sowohl auf Winddrehungen (Windrichtungsänderung) als auch auf Schiffsdrehungen (Kursänderung). Diese Richtungsänderung wird mechanisch derart auf das Ruderblatt des Schiffes übertragen, dass der Winkel zwischen Schiff und scheinbarem Wind immer gleich bleibt. Dadurch fährt das Schiff bei gleich bleibender Windrichtung geradeaus. Der Kurs muss nur bei größeren Winddrehungen korrigiert werden.
Mechanische Windfahnensteuerungen werden häufig bei Weltumsegelungen genutzt. Sie sind robust und benötigen keine elektrische Energie.
- elektronische Windfahnensteuerung
Bei der elektronischen Windsteuerung wird die Drehung der Windfahne auf der Mastspitze dem Autopiloten als elektrisches Signal zugeführt. Dieser berechnet dann daraus und unter Berücksichtigung des vorgegebenen und des tatsächlichen Kurses des Schiffes die erforderliche Korrektur.
Pinnensteuerung
Bei der Pinnensteuerung wirkt das elektrische Steuersignal über eine elektrisch angetriebene Schubstange mechanisch direkt auf die Pinne.
Radsteuerung
Bei der Radsteuerung wirkt das elektrische Steuersignal über einen elektrisch angetriebenen Zahnriemen direkt auf das Steuerrad.
Hydraulische Steuerung
Bei der hydraulischen Steuerung wirkt das elektrische Steuersignal über eine Hydraulikpumpe und Hydraulikventile auf einen Zylinder, der mit Öldruck eine Schubstange bewegt, die direkt auf den Ruderquadranten wirkt und so das Ruderblatt bewegt.
Flugzeuge
Einsatz
Der erste Flug eines Flugzeuges, das durch einen Autopiloten der Firma Sperry (USA) gesteuert wurde, fand 1914 auf der Weltausstellung in Paris statt. Anfangs wurde der Autopilot nur für die Stabilisierung des Flugzeuges verwendet, indem die Drehbewegungen um die drei Raumachsen des Flugzeuges kontrolliert und korrigiert wurden. So konnte ohne Eingreifen des Piloten die Fluglage beibehalten werden. Mit der Vervollkommnung des Autopiloten konnte dieser dann auch für die Navigation und Flugsteuerung während allen Phasen des Fluges (vom Start bis zur Landung) verwendet werden. Solche Autopiloten kontrollieren die Steuerflächen (Ruder) und die Triebwerke.
Die einzelnen Steuerparameter (Kurs, Höhe, Querneigung usw.) werden jeweils von einem oder mehreren Sensoren gemessen. Die Signalverarbeitung erfolgt in einem Computer, der den Ist-Wert mit dem Soll-Wert vergleicht und bei Abweichungen nach sehr komplexen Regeln steuernd eingreift und Servos aktiviert, die auf die Ruder wirken.
Klassifizierung
Es wird unterschieden zwischen
- einachsigem Autopilot,
- zweiachsigem Autopilot (mit oder ohne Höhenvorwahl) und
- dreiachsigem Autopilot.
In modernen Verkehrsflugzeugen arbeitet der Autopilot mit dem Flight Management System (FMS) zusammen. Das FMS wird auf die gewünschte Flugroute und Flughöhe programmiert und diese Daten an den Autopiloten weitergegeben, der die Werte dann umsetzt. Bei größeren Verkehrsflugzeugen arbeitet das FMS dazu noch mit der Triebwerkssteuerung zusammen, sodass auch diese Parameter nicht mehr vom Piloten gesteuert werden müssen und ein weitestgehend automatisierter Flug stattfindet.
Modellvielfalt
Es gibt nicht „den einen“ Autopiloten, sondern eine Vielzahl verschiedener Autopiloten von verschiedenen Herstellern. Auf Grund der zunehmenden Rechenleistung statten die Hersteller ihre Autopiloten mit immer neuen Merkmalen und Fähigkeiten aus, so dass sie sich in den letzten Jahrzehnten deutlich weiterentwickelt haben. Alte Flugzeuge können mit einem neuen Autopiloten nachgerüstet werden.
Vorteile des Autopiloten
Der Autopilot dient der Entlastung des Piloten, damit er sich kurzfristig auf andere Aufgaben konzentrieren kann, wie Funk, Navigation, Treibstoffberechnung, Nachschlagen im Pilotenhandbuch bei Abweichungen vom Normalbetrieb und anderem. Der Autopilot entlastet den Piloten und vermeidet somit menschliche Fehler. Er unterstützt den Piloten besonders unter Instrumentenflugbedingungen, aber auch bei Langstreckenflügen.
Nachteile des Autopiloten
Ein Autopilot bringt zusätzliche Komplexität für die Konstruktion des Flugzeuges mit sich. Der Pilot muss lernen, ihn richtig zu bedienen. Es gab gefährliche Zwischenfälle infolge von Bedienfehlern des Piloten.
Zwischenfall über Moskau
Ein Airbus A310-304 der Interflug (D-AOAC) mit 109 Insassen befand sich am 11. Februar 1991 im Landeanflug auf den Flughafen Moskau-Scheremetjewo, als er vom Autopiloten in eine sehr gefährliche Situation gebracht wurde. Die Flugsicherung wies den Piloten wegen einer blockierten Landebahn ein Durchstarten an, als das Flugzeug gerade unter 470 Meter über Grund sank. Die Besatzung gab die Anweisung zum Durchstarten in ihr Flugkontrollsystem ein. Das Durchstartmanöver wurde dann automatisch eingeleitet.
Der einsetzende Steigflug verlief in den Augen des Piloten allerdings zu steil, weshalb er den Autopiloten deaktivierte und versuchte, eine gemäßigtere Flugbahn zu erreichen. Allerdings bemerkte der Pilot nicht, dass der Autopilot nach wie vor eingeschaltet war. Der nun für den Autopiloten zu flachen Flugbahn begegnete das System mit einer steileren Anstellung der Trimmfläche, während der Pilot erneut Steuereingaben gegen den Steigflug gab – Pilot und Autopilot kämpften also gegeneinander.
Der Autopilot besaß jedoch größere Wirkung auf die Steuerflächen, weshalb sich das Flugzeug mit der Zeit beinahe senkrecht aufstellte und in einer Höhe von etwa 1300 m aufgrund zu geringer Geschwindigkeit durchsackte. Es stürzte 900 m, bevor es abgefangen werden konnte. Danach stieg das Flugzeug erneut um 1300 m, um anschließend wieder durchzusacken. Dieser Zyklus wiederholte sich insgesamt vier Mal. Erst nach der Reduzierung der Triebwerksleistung gelang es den Piloten, das Flugzeug wieder unter ihre Kontrolle zu bringen und sicher zu landen.
Die unmittelbare Unfallursache war ein Bedienungsfehler durch die Piloten. Dieser wurde jedoch erst durch das Systemdesign möglich, das vorsah, dass sich der Autopilot nicht automatisch ausschaltete, wenn ein Pilot das Steuer übernahm, sondern dass es jeweils von Hand deaktiviert werden musste. Es ist beim A310 also noch möglich, dass Pilot und Autopilot „gemeinsam“ das Flugzeug steuern. Mit dem A320 wurde das Design geändert: Greift der Pilot hier in die Steuerung ein, so schaltet sich der Autopilot automatisch ab.
Air-Inter-Absturz
Ein anderer Pilot stellte eine falsche Sinkrate am Autopiloten des Airbus (FCU, Flight Control Unit) ein. Der Unfall ereignete sich am 20. Januar 1992 in Straßburg, Frankreich. Ein Airbus A320-111 (F-GGED) der Air Inter stürzte während des Anflugs auf den Flughafen Straßburg wegen der falsch voreingestellten Sinkrate ab. Von den 96 Menschen an Bord starben 87 Menschen (davon fünf Besatzungsmitglieder), neun Menschen überlebten (davon ein Besatzungsmitglied). Das Flugzeug flog in 2710 ft Höhe in Wolken in einen Berg (CFIT) in der Nähe von Mont Sainte-Odile (Odilienberg) am Ostrand der Vogesen. Es kam aus Lyon und befand sich im Endanflug (final approach) auf Straßburg. Wegen der falsch eingegebenen Sinkgeschwindigkeit sank das Flugzeug mit 3300 ft/min statt mit 800 ft/min. Dadurch sank das Flugzeug unter die Sicherheitsmindesthöhe. Die Flugzeuge der Air Inter waren nicht mit GPWS ausgerüstet, obwohl es generell für den A320 verfügbar ist und auch zum Unfallzeitpunkt war. Der Unfalluntersuchungsbericht[1] nannte unter anderem das schlechte Design des Autopilotenbedienpanels als Unfallfaktor.
Nachdem sich am 13. Januar 2006 der Europäische Gerichtshof mit der überlangen Verfahrensdauer beschäftigt hatte, wurde am 2. Mai 2006 – also 14 Jahre nach dem Unfall – der Strafprozess wegen fahrlässiger Tötung gegen leitende Angestellte von Airbus und Air France eröffnet. Am 7. November wurden alle Angeklagten freigesprochen, Airbus und Air France wurden aber zu zivilrechtlichen Leistungen an die Hinterbliebenen verpflichtet.
Weitere Probleme
Auch Privatpiloten, die nur gelegentlich ein Leichtflugzeug fliegen, das mit einem Autopiloten ausgerüstet ist, haben sich durch unbemerktes und unbeabsichtigtes Einschalten des Autopiloten in Gefahr gebracht.
Durch den Autopiloten kann sich der Übungsstand des Piloten verschlechtern, insbesondere bei Linienpiloten, wo der Autopilot während über 95 % der Flugzeit eingeschaltet ist. Eventuell wird dann auch bewusst auf das Fliegen mit dem Autopiloten verzichtet, um die fliegerischen Fähigkeiten und Reflexe des Piloten zu verbessern. Das Gleiche trifft für Landungen zu, bei denen Linienpiloten sehr oft manuell fliegen und bewusst auf den Einsatz des Autopiloten verzichten. Zum Einen, um in Übung zu bleiben, zum Anderen, um formale Anforderungen zu erfüllen, da sie im Monat eine bestimmte Anzahl von Landungen brauchen, um ihre Berechtigung für Schlechtwetterlandungen (CAT II und III) zu behalten.
Höhen
Der Autopilot wird nach dem Start erst in einer bestimmten vorgeschriebenen Flughöhe eingeschaltet. Bei großen Verkehrsflugzeugen liegt diese Höhe bei etwa 500 ft. Automatische Starts mittels Autopilot sind in Flugzeugen nicht vorgesehen.
Auch bei der Landung wird der Autopilot spätestens in einer bestimmten vorgeschriebenen Flughöhe ausgeschaltet. Lediglich für automatische Landungen bleibt der Autopilot bis zum Aufsetzen eingeschaltet. Bei der automatischen Landung hält der Autopilot das Flugzeug nach dem Aufsetzen auf der Mittellinie der Landebahn und bremst das Flugzeug mittels Zu- und Abschalten der Schubumkehr und das reguläre radiale Bremsen ab.
Autoland
Für die Autolandfunktion des Autopiloten ist es meist erforderlich, dass das Flugzeug mit drei Autopiloten ausgerüstet ist.
Die drei Autopiloten müssen zum Zeitpunkt des Einschaltens der Autoland-Funktion fehlerlos funktionieren. Sollte während der automatischen Landung einer der drei Autopiloten ausfallen oder einen anderen Zustand annehmen, als die übrigen beiden Autopiloten, dann wird von der „Mehrheit“ der anderen beiden Autopiloten „demokratisch“ entschieden, welcher Autopilot defekt ist. Dieser Autopilot wird dann ausgeschaltet und der Landeanflug wird mit zwei Autopiloten fortgesetzt. Die automatische Landung darf in diesem Fall – Ausfall während des Anfluges – auch mit nur zwei Autopiloten erfolgen. Der Pilot hat währen des gesamten Vorganges die Hand am Steuerknüppel und fühlt die Bewegungen des Autopiloten mit. Die automatische Landung erlaubt keinerlei Eingriffe seitens des Piloten, es sei denn der Pilot stellt eine Fehlfunktion fest. In diesem Falle wird in der Regel ein Durchstarten eingeleitet, wenn eine Autolandung aufgrund der Sichtverhältnisse zwingend vorgeschrieben ist (CAT II und III). Bei guten Sichtbedingungen (CAT I und besser) kann der Pilot die Landung jedoch manuell durchführen.
Einachsige Autopiloten
 Bild 2: Autopilot KAP 140, einachsig
Bild 2: Autopilot KAP 140, einachsig Bild 3: Autopilot KAP 140, einachsig, Rollmodus aktiviert
Bild 3: Autopilot KAP 140, einachsig, Rollmodus aktiviertDie einfachste Form des Autopiloten ist der einachsige Autopilot, auch als „wing leveller“ (sinngemäß auf Deutsch: Tragflächen horizontal ausrichten) bekannt. Er kontrolliert nur die Drehung um die Längsachse (Rollachse) – das Rollen. Er kann die Tragflächen horizontal halten, indem er das Querruder steuert. Der einachsige Autopilot hat nur den Horizontalmodus. Mit dem Querruder sind nur Richtungsänderungen möglich, nicht jedoch eine Änderung der Flughöhe.
Ein weit verbreiteter Autopilot für Kleinflugzeuge und Zweimots ist der Bendix/King KAP 140. Seine Modellvariante als einachsiger Autopilot hat fünf Bedienknöpfe. Mit der Taste AP (für: Autopilot) wird der KAP 140 eingeschaltet. Dabei ist der ROL-Modus (Rollmodus) aktiviert, der die Tragflächen in horizontaler Position hält. So kann das Flugzeug nicht zur Seite abkippen. Wenn der Pilot vorher eine angemessene Geschwindigkeit eingestellt hat und das Flugzeug ausgetrimmt ist, dann fliegt es in einem sehr stabilen Zustand.
 Bild 4:Kurskreisel – Rechts unten am rot beschrifteten Knopf (HDG) lässt sich der Kurs eindrehen, den der Autopilot halten soll. Momentan ist ein Kurs von 325° eingedreht (roter Strich). Es liegt ein aktueller Kurs von 295° an. Mit dem linken unteren Drehknopf (PUSH, erst drücken, dann drehen) wird der Kurskreisel regelmäßig nach den Kurswerten am Magnetkompass nachjustiert.
Bild 4:Kurskreisel – Rechts unten am rot beschrifteten Knopf (HDG) lässt sich der Kurs eindrehen, den der Autopilot halten soll. Momentan ist ein Kurs von 325° eingedreht (roter Strich). Es liegt ein aktueller Kurs von 295° an. Mit dem linken unteren Drehknopf (PUSH, erst drücken, dann drehen) wird der Kurskreisel regelmäßig nach den Kurswerten am Magnetkompass nachjustiert.Die vier weiteren separat einzuschaltenden Modi sind:
- HDG (zum Erfliegen und Halten eines am Kurskreisel eingestellten Kurses)
- NAV (Navigation; zum Erfliegen und Halten eines am VOR oder GPS eingestellten Kurses)
- APR (Approach; Anflug; wirkt wie NAV-Modus, ist jedoch deutlich empfindlicher, so dass ein sehr genauer Landekurs geflogen werden kann)
- REV (Reverse; Umkehrkurs; wirkt wie APR-Modus, jedoch reagiert der Autopilot auf die Ausschläge der Kursnadel genau andersherum; dieser Modus wird bei vielen Autopiloten auch als BC – back course, Umkehrkurs oder Rückseitenkurs – bezeichnet)
Die vier Tasten – HDG, NAV, APR, REV – werden durch Drücken aktiviert und durch erneutes Drücken deaktiviert. Es kann jeweils nur eine der vier Tasten aktiviert sein. Sind alle vier Tasten deaktiviert, dann fällt der Autopilot zurück in den ROL-Modus – sofern der Autopilot eingeschaltet ist. Der ROL-Modus ist der kleinste gemeinsame Nenner aller Modi des einachsigen Autopiloten.
Zweiachsige Autopiloten
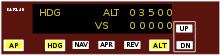 Bild 5: Autopilot KAP 140, zweiachsig, ohne Höhenvorwahl
Bild 5: Autopilot KAP 140, zweiachsig, ohne HöhenvorwahlZweiachsige Autopiloten kontrollieren zusätzlich zur Rollachse die Pitchachse, also das Nicken um die Querachse. Sie können das Flugzeug zusätzlich um die Querachse nicken lassen (eng. pitching) – die Nase des Flugzeuges wird angehoben oder gesenkt. Mit dieser zweiten Achse des Autopiloten ist eine Höhensteuerung möglich, der vertikale Modus. Dazu steuern sie ein Pitch Servo und ein Pitch Trim Servo an.
Einachsige Autopiloten können das Flugzeug nur seitlich steuern (laterale Navigation), während zweiachsige Autopiloten das Flugzeug seitlich und in der Höhe (vertikale Navigation) steuern können.
In einfacher Ausführung ist der zweiachsige Autopilot ein „wing leveller“ mit der begrenzten Fähigkeit, die Schwingungen um die Querachse, also das Nicken, zu korrigieren. Am anderen Ende der Produktskala von zweiachsigen Autopiloten gibt es sehr komplexer Ausführung, die für die automatische Flugführung geeignet sind, wobei die Empfangssignale der Radionavigationsempfänger an Bord (VOR, NDB, GPS) ausgewertet werden.
Der KP 140 hat neben den vier Tasten für die horizontalen Modi (HDG, NAV, APR, REV) noch eine fünfte Taste für den vertikalen Modus – ALT (Altitude; Höhe). Bei aktivierter ALT-Taste hält der Autopilot die aktuelle Flughöhe bei.
Durch Drücken der Taste UP (hoch) wird ein Steigflug mit etwa 500 ft/min eingeleitet, der so lange beibehalten wird, wie die Tast gedrückt wird. Entsprechend erfolgt beim Drücken der DN-Taste (Down, runter) ein Sinkflug.
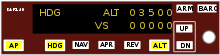 Bild 6: Autopilot KAP 140, zweiachsig, mit Höhenvorwahl
Bild 6: Autopilot KAP 140, zweiachsig, mit HöhenvorwahlWeiterhin gibt es zweiachsige Autopiloten mit Höhenvorwahl, so dass sich eine Flughöhe vorgeben lässt. Auch die vertikale Geschwindigkeit, mit der das Flugzeug zu dieser Flughöhe fliegt, lässt sich einstellen. Der Approach-Modus (Anflug) ist dann auch in der Lage, dem ILS-Gleitpfad vertikal zu folgen.
Das Modell des KAP 140 mit Höhenvorwahl hat zusätzlich einen zweiteiligen Drehschalter zur Eingabe der Höhe und die Tasten ARM und BARO.
Da der Autopilot bei diesen Modellen nicht den Schubhebel kontrolliert, muss der Pilot weiterhin diese Aufgabe übernehmen. Beim Anflug muss er die richtige Anfluggeschwindigkeit kontrollieren. Beim Steigflug muss er darauf achten, dass der Autopilot das Flugzeug nicht mit einer zu großen Steiggeschwindigkeit in einen Strömungsabriss steuert. Die Kontrolle und Aufmerksamkeit des Piloten ist also weiterhin erforderlich.
Noch besser ausgestattete Autopiloten verfügen zusätzlich zur Höhenvorwahl noch über eine Höhenwarnung, die 1000 bzw. 100 ft vor dem Erreichen einer voreingestellten Flughöhe ein akustisches und/oder optisches Warnsignal für den Piloten gibt.
Piper Alti Control 3
Bei diesem sehr alten Autopiloten wurde der laterale und vertikale Modus von zwei völlig verschiedenen Geräten gesteuert. Von dieser Ausnahme abgesehen lässt sich bei modernen Autopiloten der Modus zum Halten der Höhe nicht mehr isoliert einschalten. Er ist immer mit der Aktivierung des ROL-Modus verbunden.
Autopilot und Flight Director
 Bild 7: Der Flight director (F/D) kann separat eingeschaltet werden, während der Autopilot in diesem Modell nur zusammen mit dem F/D eingeschaltet werden kann (F/D A/P).
Bild 7: Der Flight director (F/D) kann separat eingeschaltet werden, während der Autopilot in diesem Modell nur zusammen mit dem F/D eingeschaltet werden kann (F/D A/P).Der Flight Director zeigt Steuerbefehle an. Dabei bewegen sich je nach Modell über dem künstlichen Horizont entweder Kreuzbalken oder ein auf dem Kopf stehendes „V“. Wenn diese Symbole in der Mitte zentriert sind, ist der Steuerbefehl exakt umgesetzt. Die Mitte ist nicht notwendig identisch mit dem Horizont, vor allem nicht im Steig- und Sinkflug. Wandern die Flight-Director-Symbole aus der Mitte, muss in die entsprechende Richtung nachgesteuert werden. Das kann manuell oder mittels Autopilot erfolgen. Der Flight Director führt also den Piloten, beziehungsweise die Servos des Autopiloten.
Strenggenommen kommen die Steuerbefehle nicht vom Flight Director, sondern vom Flight Control Computer, während mit „Flight Director“ in der Regel nur die Anzeige-Symbolik gemeint ist. Ob diese zwingend sichtbar sein muss, um den Flight Control Computer zu betreiben, ist modellabhängig.
Autopilot und Autothrottle
Der Autothrottle ist die automatische Steuerung der Triebwerke und normalerweise kein Bestandteil des Autopiloten; vielmehr werden die Triebwerke von einem separaten Schubregel-Computer gesteuert, in modernen Flugzeugen ist diese Aufgabe im Flight Management Computer integriert. Wird von der Besatzung eine bestimmte Fluggeschwindigkeit gewählt, so hängt es von der Flugsituation ab, ob der Autopilot oder der Autothrottle die Fluggeschwindigkeit steuert: Im Sink- oder Steigflug steuert der Autopilot mittels Höhenruder die gewählte Fluggeschwindigkeit, während der Autothrottle eine feste Triebwerksleistung fixiert, und zwar eine hohe im Steigflug, eine niedrige im Sinkflug, je nach erwünschter Steig- oder Sinkrate. Im horizontalen Flug wiederum steuert der Autopilot die gewählte Höhe und der Autothrottle die Fluggeschwindigkeit.
Autopilot und Flight Management System
Flugzeuge, die mit einem Flight Management System (FMS) ausgerüstet sind, haben üblicherweise im Autopiloten zwei zusätzliche Modi:
- VNAV (vertikale Navigation): Höhenruder- und Triebwerksteuerung zur Verfolgung des im FMS eingegebenen Flugprofils
- LNAV (laterale, bzw. horizontale Navigation): Querrudersteuerung gemäß den im FMS eingegebenen Kursen und Kurvenradien
Auf dem Primary Flight Display (PFD), dem Hauptfluginstrument des Glascockpits, wird der jeweils aktive Modus des Autopiloten angezeigt; dies gilt allerdings für alle Modi, nicht nur für FMS-Modi. Des Weiteren wird gegebenenfalls automatisch von Modus zu Modus gewechselt, hierbei wird auf dem PFD zusätzlich und in anderer Farbe der zu erwartende Modus angezeigt.
Landung mit Autopilot
Eine Landung mit Autopilot auf der Landebahn und das anschließende Ausrollen, also das Halten auf der Landebahnmittellinie wird als CAT-III-Landung oder Autoland bezeichnet. Eine CAT-III-Landung erfordert ein entsprechend ausgerüstetes und zugelassenes Flugzeug, eine dafür geschulte und zugelassene Besatzung und einen entsprechend ausgerüsteten und zugelassenen Flugplatz. CAT-III-Landungen dürfen, abgesehen von bestimmten Flugzeugmustern, nur noch mit dem Autopiloten aufgrund dessen etwa viermal höherer Reaktionsgeschwindigkeit geflogen werden. Derzeit sind Landungen nach CAT IIIa und IIIb möglich. CAT IIIc erfordert zusätzlich zum Abbremsen auf der Bahn noch ein Abrollen von dieser.
Standardtätigkeiten des Autopiloten
Wenn das Flugzeug nach dem Start bis zur gewünschten Höhe gestiegen ist, geht es in den horizontalen Reiseflug über. Betrachten wir zunächst das Einhalten einer bestimmten Flughöhe:
Solange sich das Flugzeug unter konstanten inneren und äußeren Bedingungen (Gewichtsverteilung, Erdatmosphäre usw.) geradeaus bewegt, bleibt die Flughöhe konstant. Das Flugzeug wird jedoch schon durch den Verbrauch von Treibstoff leichter und beginnt zu steigen. Deshalb wird die barometrische Höhenmessanlage bald eine Abweichung von der vorgewählten Höhe feststellen. Der Pitchkanal, der den Anstellwinkel regelt, gibt an das Höhenruder ein Signal zur Ausregelung der Differenz, bis die als Sollwert vorgegebene Höhe wieder erreicht ist. Da durch den Gewichtsverlust der Auftrieb und deshalb der Anstellwinkel verringert werden kann und somit der Widerstand sinkt, steigt die Fluggeschwindigkeit, weshalb nun der Geschwindigkeitskanal (Auto Throttle Computer) die Motorleistung so nachregelt, dass die vorgewählte Höhe bei der ebenfalls vorgewählten (optimierten) Sollgeschwindigkeit eingehalten wird.
Die Flugrichtung wird über den Rollkanal geregelt. Angenommen, der Pilot stellt 315° als Kurs ein, also genau nach Nordwesten. Ändern sich die Außenbedingungen, wie zum Beispiel die Windrichtung, wird das Flugzeug aus dem berechneten Kurs abdriften, wenn nicht gegengesteuert wird. Eine Kompassanlage misst nun die Abweichung vom vorgewählten Kurs und gibt zum Ausgleich ein Signal an die Querruder – das Flugzeug kippt ein wenig (dreht sich seitlich um die Längsachse). Das Seitenruder arbeitet wie eine Stabilisierungsflosse und das Flugzeug dreht sich zusätzlich um die Hochachse, bis der Kurs 315° wieder anliegt. Danach steuert der Rollkanal wieder in eine mittlere Lage. Während der seitlichen Bewegung hatte das Flugzeug aber einen höheren Widerstand und nahm dadurch die Nase nach unten – worauf sofort der Pitchkanal angesprochen und die Nase wieder nach oben gesteuert hatte. Auch diese Korrektur hatte zusätzlichen Widerstand verursacht und die Fahrt verringert, weshalb der Fahrtregler die Motorleistung wieder erhöhen musste.
Über diese Standard-Routinen hinaus gibt es eine große Zahl weiterer Regelfunktionen, die unerwünschte Bewegungen abfangen und den Passagieren den Flug angenehmer machen. Die Piloten wiederum können sich in anspruchsvollen Flugphasen – wie etwa vor der Landung oder bei Planänderungen durch die Flugsicherung – ihren Tätigkeiten widmen, ohne das Flugzeug dauernd nachsteuern zu müssen.
Positionsbestimmung
Die Position liest ein moderner Autopilot aus einem Inertialen Navigationssystem (INS) aus und zusätzlich, soweit empfangbar, aus mehreren Drehfunkfeuern (sog. VOR-Stationen) und immer häufiger auch aus GPS-Signalen. Besonders über Ozeanen stand vor der GPS-Ära nur das INS zur Verfügung Mit dem Fortschreiten der Flugdauer sammelte sich ein Positionsfehler im INS. Zur Fehlerreduzierung hatte das INS ein Karussell-System, das sich jede Minute drehte, so dass die Fehler in verschiedene Richtungsvektoren geteilt wurden und sich so gegenseitig aufhoben. Die Messfehler der Gyroskope, welche die Positionsdaten immer mehr verfälschen, werden als Drift bezeichnet. Dieser Fehler beruht auf den physikalischen Eigenschaften des Systems, unabhängig davon, ob es sich um mechanische Gyroskope oder Lasergyroskope handelt.
Mittels digitaler Datenverarbeitung und eines 6-dimensionalen Kalman-Filters werden die Diskrepanzen zwischen beiden aufgelöst. Die sechs Dimensionen sind Längengrad, Breitengrad, Flughöhe, Querwinkel (Rollneigung), Nickwinkel und Gierwinkel.
Auf vielen transozeanischen Flugrouten muss das INS eine bestimmte Positionsgenauigkeit gewährleisten (engl. performance factor). Deshalb wird im Flug auch die Größe des möglichen Positionsfehlers überwacht. Je länger der Flug dauert, umso größer wird der Fehler, der sich im System aufaddiert. In Landnähe kann dann die Flugzeugposition mit Zusatzinformationen von Radionavigationsanlagen (VOR, VOR/DME) aktualisiert werden, außerhalb der Reichweite von VOR's kann die Position über GPS korrigiert und aktualisiert werden. Das primäre System zur Positionsbestimmung bleibt aber das INS, da es als unabhängiges Bordsystem am sichersten ist und nur vom eigenen System abhängt (Software, Stromversorgung). Das INS kann zwar immer ungenauer werden, aber es kann nicht von außen abgeschaltet werden, während VOR oder GPS durch deren Betreiber abgeschaltet werden können.
Das INS besteht meist aus drei IRUs (also die Gyroskope), die als Eingabegröße lediglich die Schwerkraft und die Erdrotation benötigen. Vom Piloten muss die Anfangsposition des Flugzeuges in das System eingegeben werden.
Geschichte der Autopiloten
Eine frühe Version eines Autopiloten, der Fluglage und -richtung hielt, wurde bereits 1914 durch Lawrence Sperry entwickelt, 1918 gründete Sperry die Lawrence Sperry Aircraft Company, eine Firma für Flugnavigationskomponenten, die auch sein neues Auto-Pilot-System herstellte und vertrieb.
Um 1930 wurden dann beispielsweise von Junkers spezielle Autopilotversionen entwickelt. An der bekannten „Tante Ju“ (Junkers Ju 52/1m – oder bei Junkers W34fao – sollten sie vor allem die Trimmung und Höhensteuerung verbessern. Letzteres ist mit dem Steuerknüppel vor allem bei Windböen oder unter Stress nicht einfach und ist bis heute der Prüfstein für junge Kopiloten, ob sie auch bei Landungen unter Scherwinden eine „gute Figur“ machen.
Später wurden Sturzflug-Autopiloten für Militärflugzeuge wie zum Beispiel für die Junkers Ju 87 B entwickelt. Ein solcher Autopilot ist mit der Luftbremse verbunden und senkt das Flugzeug in die Sturzkampfstellung. In geringer Höhe (oder nach Bombenabwurf) bringt der Autopilot das Heck wieder in die Ursprungslage.
Ab 1930 wurden auch bei Siemens & Halske Autopilotsysteme entwickelt: Der Begriff „Autopilot“ wurde 1937 der Firma als Warenzeichen geschützt.[2] Die 1939 gegründete Tochtergesellschaft Luftfahrtgerätewerk Hakenfelde (LGW) war Nachfolger der seit 1934 tätigen Siemens Apparate und Maschinen GmbH (SAM) in Berlin-Marienfelde.
Im Zweiten Weltkrieg kamen mit der enormen Reichweitenerhöhung neue Anforderungen auf die Piloten zu: Es galt stundenlang den Kurs zu halten, Instrumente und Kurs zu überwachen und der Pilot war davon schon vor dem Erreichen des Zieles stark ermüdet. Deshalb wurde von General Electric (GE) um 1943 im Auftrag der United States Army Air Forces (USAAF) eigens ein Autopilot entwickelt, der alle drei Achsen komplett steuerte. Diese entlastete den Piloten im engen Verbandsflug enorm. Der Autopilot der Boeing B-29 war sogar mit dem speziellen Bomben-Zielgerät der US-Firma Norden („Norden Bombsight“) verbunden: Der Pilot übergab wenige Minuten vor dem Ziel die Kontrolle der Maschine an den Bombenschützen, der die Maschine mit dem Zielgerät dann per Fadenkreuz auf Zielkurs steuerte.
Eine Komponente des Autopiloten ist auch der „Speedhold“, also das exakte Halten der Geschwindigkeit. Das ist im Formationsflug sehr wichtig und würde hohe Konzentration erfordern. Diese Funktion kann, beispielsweise bei der F-104G, getrennt von der Lageregelung bzw. -dämpfung geschaltet werden.
In den 1950er- bis 1970er-Jahren wurden enorme Verbesserungen durch Koppelung mit den Trägheitsplattformen erreicht. Erst mit der Entwicklung der „Fly-by-Wire“-Technik der deutschen Senkrechtstarter (VFW-Fokker VAK 191 B, EWR VJ 101C und der Dornier Do-31) und später beispielsweise des europäischen Airbus sowie des Kampfflugzeugs Tornado wurden jedoch bahnbrechende Fortschritte bei den Autopiloten erzielt. Mit der Einführung der Digitaltechnik in den 1990er-Jahren wurde der Autopilot mit der Fluglagesteuerung verschmolzen: Der Pilot gibt die Richtung vor – die Lageregelung bringt das Flugzeug in diese gewünschte Richtung und behält sie bei.
Computersystem
Die Hardware eines Autopiloten für ein typisches großes Flugzeug besteht aus fünf 80386-CPUs, dabei ist jede CPU auf einer eigenen Leiterplatte. Die 80386-CPU ist preisgünstig, hat ein ausgereiftes Design und ist durchgetestet. Auf dem 80386 kann ein echter virtueller Computer implementiert werden. Neuere Versionen sind sogar strahlenresistent und für die Verwendung in der Luftfahrt zusätzlich verstärkt. Es wird bewusst auf das sehr alte Design der 80386 zurückgegriffen, da es zuverlässig ist und sein Softwareverhalten ausführlich getestet und beschrieben ist.
Das Betriebssystem des Kunden stellt eine virtuelle Maschine für jeden Prozess zur Verfügung. Die Software des Autopiloten kontrolliert die Elektronik des Computers also immer über den Umweg und nie direkt, stattdessen steuert sie die Softwaresimulation, die auf der 80386-CPU abläuft.
Die meisten schwerwiegenden fehlerhaften Softwareoperationen führen zu einem Systemabsturz der jeweiligen CPU.
Meist läuft auf jeder CPU ein Prozess mit niedriger Priorität, der kontinuierlich den Computer testet. Prinzipiell läuft jeder Prozess im Autopiloten in identischer Form als Kopie an drei oder mehr Stellen in verschiedenen CPUs ab. Das System entscheidet dann, welche der Ergebnisse akzeptiert werden. Dabei wird der Mittelwert übernommen, wobei extrem abweichende Werte verworfen werden.
Bei einigen Autopiloten kommt als zusätzliches Sicherheitsmerkmal noch ein unterschiedliches Design (engl. design diversity) hinzu. Dabei werden kritische Softwareprozesse nicht nur auf verschiedenen Computern ausgeführt, sondern auf jedem Computer läuft Software, die von verschiedenen Entwicklungsteams erstellt wurde, da es nicht sehr wahrscheinlich ist, dass verschiedenen Entwicklungsteam den gleichen Fehler machen. Wegen der Zunahme der Komplexität der Software und der steigenden Kosten für die Software rücken aber viele Entwicklungsfirmen von dieser Sicherheitsvorkehrung durch Diversität ab.
Stand der Technik und Ausblick
Bei modernen „Fly-by-Wire“-Systemen (Tornado, Airbus, F-16, Eurofighter) verschwimmen die Grenzen der einzelnen Systeme. Moderne, wegen ihrer Agilität instabil konzipierte, Kampfflugzeuge können ohne Rechnerunterstützung nicht mehr geflogen werden. Zusätzlich wird durch die implementierten Flugsteuerungssysteme eine Einhaltung des ‚Flight Envelopes‘ erzwungen. Eine Überschreitung der physikalischen Grenzen (Aerodynamik und auch strukturelle Belastungen) wird dadurch weitgehend unterbunden. Die Umsetzung von unbemannten Flugzeugen ist heute schon Realität. Allerdings scheitern diese Systeme an ihren ‚noch‘ recht eingeschränkten Einsatzmöglichkeiten. Spezielle Manöver (Aufklärung, Übernahme von einzelnen Flugphasen wie Cruise oder sogar die vollautomatische Landung) sind bei entsprechender Peripherie aber heute schon Stand der Technik.
Autopiloten in der Militärluftfahrt
In der Militärluftfahrt werden heute Autopiloten verwendet, die ein Abfangen aus einem unkontrolliertem Flugzustand auf Knopfdruck ermöglichen, so beim Eurofighter Typhoon. Dies kann manchen Verlust an Mensch und Material verhindern helfen und erhöht zudem die Überlebenschance in einer Gefechtssituation.
Siehe auch
Einzelnachweise
- ↑ Offizieller Unfallbericht
- ↑ Die Deutsche Luftfahrt, Band 20: Kurt Kracheel, Flugführungssysteme. Bernard & Graefe Verlag, Bonn 1993, ISBN 3-7637-6105-5.
Weblinks
 Commons: Aircraft instruments – Sammlung von Bildern, Videos und Audiodateien
Commons: Aircraft instruments – Sammlung von Bildern, Videos und Audiodateien








Wikimedia Foundation.