- Newton-Leibniz-Formel
-
Der Fundamentalsatz der Analysis, auch bekannt als Hauptsatz der Differential- und Integralrechnung (kurz: „HDI“), bringt die beiden grundlegenden Konzepte der Analysis, nämlich das der Integration und das der Differentiation, miteinander in Verbindung. Er sagt aus, dass Ableiten und Integrieren jeweils die Umkehrung des anderen sind. Der Satz besteht aus zwei Teilen, die manchmal als erster und zweiter Hauptsatz der Analysis bezeichnet werden. Die konkrete Formulierung des Satzes und sein Beweis variieren je nach Aufbau der betrachteten Integrationstheorie. Hier wird zunächst das Riemann-Integral betrachtet.
Inhaltsverzeichnis
Geschichte und Rezeption
Bereits Isaac Barrow, der akademische Lehrer Newtons, erkannte, dass Flächenberechnung (Integralrechnung) und Tangentenberechnung (Differentialrechnung) in gewisser Weise invers zueinander sind, den Hauptsatz fand er jedoch nicht. Der erste, der diesen publizierte, war 1667 James Gregory in Geometriae pars universalis.[1] Die ersten, die sowohl den Zusammenhang als auch dessen fundamentale Bedeutung erkannten, waren unabhängig voneinander Isaac Newton und Gottfried Wilhelm Leibniz mit ihrer Infinitesimalrechnung. In ersten Aufzeichnungen zum Fundamentalsatz aus dem Jahr 1666 erklärt Newton den Satz für beliebige Kurven durch den Nullpunkt, weswegen er die Integrationskonstante ignorierte. Newton publizierte dies erst 1686 in Philosophiae Naturalis Principia Mathematica. Leibniz fand den Satz 1677, er schrieb ihn im Wesentlichen in der heutigen Notation nieder.
Seine moderne Form erhielt der Satz durch Augustin Louis Cauchy, der als erster eine formelle Integraldefinition gab sowie einen Beweis mit Hilfe des Mittelwertsatzes. Enthalten ist dies in seiner Fortsetzung von Cours d'Analyse von 1823. Cauchy untersuchte auch die Situation im Komplexen und bewies damit eine Reihe zentraler Resultate der Funktionentheorie. Im Laufe des 19. Jahrhunderts fand man die Erweiterungen auf höhere Dimensionen. Henri Léon Lebesgue erweiterte dann 1902 den Fundamentalsatz mit Hilfe seines Lebesgue-Integrals auf unstetige Funktionen.
Der Hauptsatz wurde im 20. Jahrhundert in der Hauptsatzkantate vertont, die häufig an Schulen oder Universitäten aufgeführt wird.
Der Satz
Der erste Teil des Satzes ergibt die Existenz von Stammfunktionen und den Zusammenhang von Ableitung und Integral.
Sei
![f:[a,b]\rightarrow\mathbb R](/pictures/dewiki/56/866c1f3d170ddca3f0b6ceb9df10c9e5.png) eine reellwertige stetige Funktion auf dem abgeschlossenen Intervall
eine reellwertige stetige Funktion auf dem abgeschlossenen Intervall ![[a,b] \subset \R](/pictures/dewiki/102/f3cbbd646206969210d947b868798c2a.png) , so ist für alle
, so ist für alle ![x_0\in [a,b]](/pictures/dewiki/48/0256d46865eafa8df913009bb4f1d987.png) die Funktion
die Funktion![F:[a,b]\rightarrow\mathbb R](/pictures/dewiki/55/7b73abb39982ae3b5d12cbea413852bd.png) mit
mit 
differenzierbar und eine Stammfunktion zu f, d. h., es gilt
 für alle
für alle ![x \in [a,b]](/pictures/dewiki/56/8290bddba5acf9822dcbf61f4ac67d1b.png) .
.Der zweite Teil des Satzes erklärt, wie Integrale berechnet werden können.
Sei
eine stetige Funktion mit Stammfunktion , dann gilt die Newton-Leibniz-Formel:Der Beweis
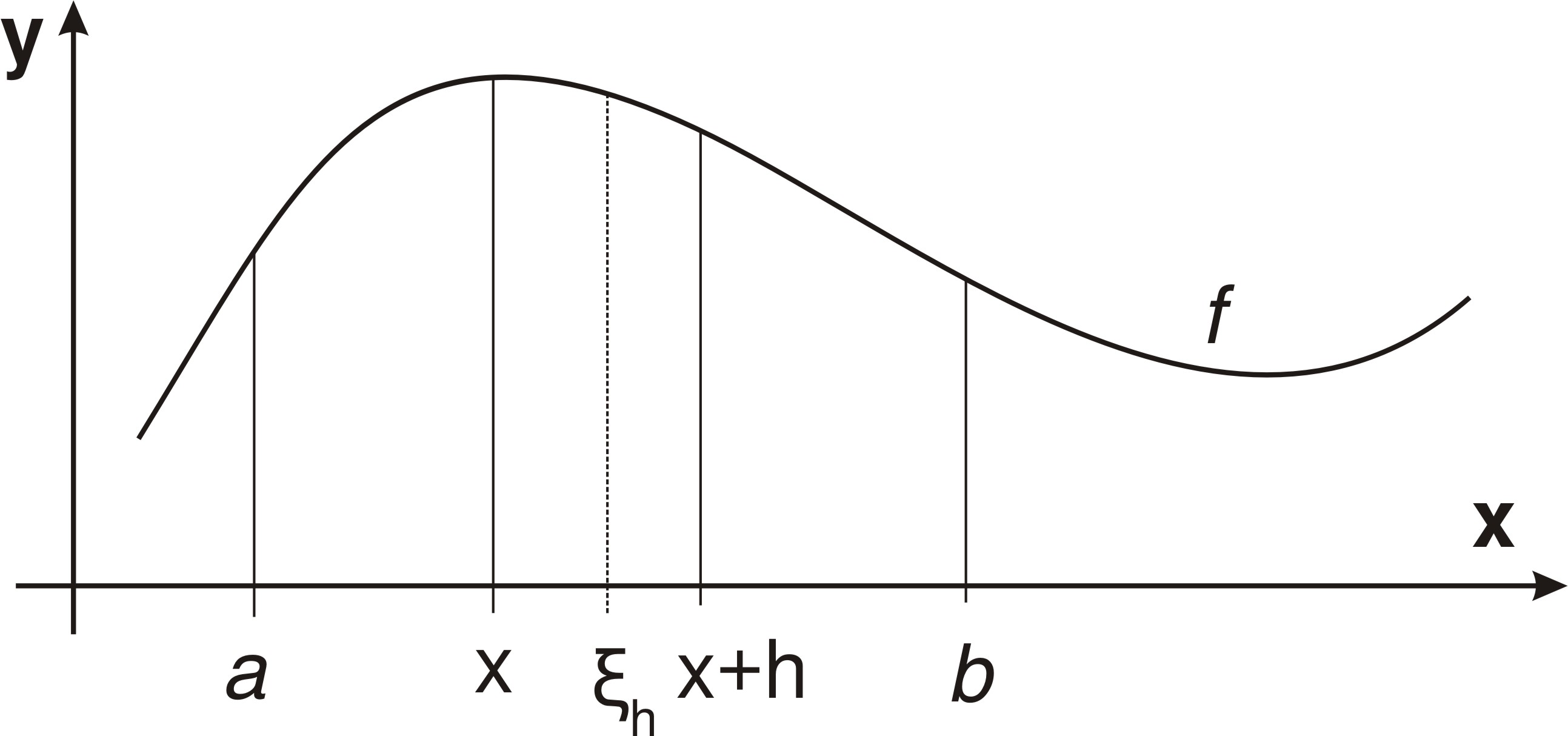
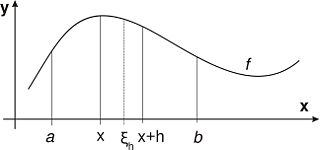 Zur Erklärung der Notation im Beweis
Zur Erklärung der Notation im BeweisDer Beweis des Satzes ist, sobald die Begriffe Ableitung und Integral gegeben sind, nicht schwierig. Die besondere Leistung von Newton und Leibniz besteht also in der Entdeckung der Aussage und ihrer Relevanz. Für den ersten Teil muss nur gezeigt werden, dass die Ableitung von F(x), gegeben durch
 , existiert und gleich f(x) ist.
, existiert und gleich f(x) ist.Dazu sei
fest und  mit
mit ![x + h \in [a,b]](/pictures/dewiki/99/cb4938d713d12227ff95253f3332c5e7.png) . Dann gilt
. Dann giltNach dem Mittelwertsatz der Integralrechnung existiert eine reelle Zahl ξh zwischen x und x + h, so dass
gilt. Wegen
 für
für  und der Stetigkeit von f folgt daraus
und der Stetigkeit von f folgt darausd. h., die Ableitung von F in x existiert und ist f(x).
Dieser Teil des Hauptsatzes kann auch ohne den Mittelwertsatz bewiesen werden, die Integrationstheorie wird dann in der Regel so aufgebaut, dass der Mittelwertsatz eine einfache Folgerung aus dem Hauptsatz ist.
Der Beweis des zweiten Teils erfolgt durch Einsetzen: Setzt man für die im ersten Teil gegebene Stammfunktion x0 = a, so ist F(a) = 0 und
 , und damit gilt der Satz. Andere Stammfunktionen unterscheiden sich von jener aber nur durch eine Konstante, diese hebt sich aber bei der Subtraktion weg, und so gilt auch dann die Formel.
, und damit gilt der Satz. Andere Stammfunktionen unterscheiden sich von jener aber nur durch eine Konstante, diese hebt sich aber bei der Subtraktion weg, und so gilt auch dann die Formel.Anschauliche Erklärung
Zur anschaulichen Erklärung betrachten wir ein Teilchen, das sich durch den Raum bewegt, beschrieben durch die Ortsfunktion x(t). Die Ableitung der Ortsfunktion nach der Zeit ergibt die Geschwindigkeit:
Die Ortsfunktion ist also eine Stammfunktion der Geschwindigkeitsfunktion. Der Hauptsatz erklärt nun, wie durch Integration aus der Ableitung einer Funktion die Funktion selbst wieder gewonnen werden kann. Die obige Gleichung sagt aus, dass infinitesimale Änderungen der Zeit eine infinitesimale Bewegung im Ort auslösen:
- dx = v(t)dt.
Eine Änderung im Ort x ergibt sich als Summe infinitesimaler Änderungen dx. Diese sind aber nach obiger Gleichung gegeben als Summen der Produkte der Ableitung v(t) und infinitesimal kleiner Änderungen in der Zeit. Genau diesem Vorgang entspricht die Berechnung des Integrals von v(t).
Anwendungen
Berechnung von Integralen durch Stammfunktionen
Die hauptsächliche Bedeutung des Fundamentalsatzes liegt darin, dass er das Problem der Berechnung von Integralen auf das Problem der Bestimmung von Stammfunktionen zurückführt.
Beispiele
Die auf ganz
 definierte Funktion f(x) = x2 besitzt die Stammfunktion F(x) = x3 / 3, und wir erhalten somit
definierte Funktion f(x) = x2 besitzt die Stammfunktion F(x) = x3 / 3, und wir erhalten somitDie auf I = [ − 1,1] definierte Funktion
 , deren Graph den Rand eines Einheitshalbkreises beschreibt, besitzt die Stammfunktion
, deren Graph den Rand eines Einheitshalbkreises beschreibt, besitzt die Stammfunktion  . Für die Fläche des Einheitskreises erhält man somit den Wert
. Für die Fläche des Einheitskreises erhält man somit den WertAm letzten Beispiel zeigt sich, wie schwierig es sein kann, Stammfunktionen gegebener Funktionen einfach zu erraten. Gelegentlich erweitert dieser Prozess die Klasse bekannter Funktionen. Etwa ist die Stammfunktion der Funktion
 keine rationale Funktion, sondern hängt mit dem Logarithmus zusammen und ist
keine rationale Funktion, sondern hängt mit dem Logarithmus zusammen und ist  .
.Herleitung von Integrationsregeln
Der Zusammenhang zwischen Integral und Ableitung erlaubt es, Ableitungsregeln, die leicht aus der Definition der Ableitung bewiesen werden können, über den Hauptsatz auf Integrationsregeln zu übertragen. Zum Beispiel kann die Potenzregel benutzt werden, um Integrale von Potenzfunktionen direkt hinzuschreiben. Interessanter sind Aussagen, die für allgemeinere Klassen von Funktionen gelten. Dabei ergibt sich dann als Übertragung der Produktregel die partielle Integration, die deswegen auch Produktintegration genannt wird, und aus der Kettenregel die Substitutionsregel. Erst dies liefert praktikable Verfahren zum Auffinden von Stammfunktionen und damit zur Berechnung von Integralen.
Verallgemeinerungen des Hauptsatzes
In seiner obigen Form gilt der Satz nur für stetige Funktionen, was eine zu starke Einschränkung bedeutet. Tatsächlich können auch unstetige Funktionen wie die Signumfunktion eine Stammfunktion besitzen. Beispielsweise gilt der Satz auch für das Regel- oder Cauchyintegral, bei dem Regelfunktionen untersucht werden. Diese besitzen an jeder Stelle einen linksseitigen und einen rechtsseitigen Grenzwert, können also sehr viele Unstetigkeitsstellen haben. Auch diese Funktionenklasse ist noch nicht ausreichend, daher folgt hier der Hauptsatz für das sehr allgemeine Lebesgue-Integral.
Der Hauptsatz für Lebesgue-Integrale
Ist f auf [a,b] Lebesgue-integrierbar, so ist für alle
die Funktion mit
mit
absolut stetig (insbesondere ist sie fast überall differenzierbar), und es gilt
 λ-fast überall.
λ-fast überall.Sei nun umgekehrt die Funktion F auf [a,b] absolut stetig. Dann ist F λ-fast überall differenzierbar. Definiert man f als
 für alle , in denen F differenzierbar ist, und identisch null für die anderen , so folgt, dass f ist Lebesgue-integrierbar ist mit
für alle , in denen F differenzierbar ist, und identisch null für die anderen , so folgt, dass f ist Lebesgue-integrierbar ist mitDer Hauptsatz im Komplexen
Der Hauptsatz lässt sich auch auf Kurvenintegrale in der komplexen Zahlenebene übertragen. Seine Bedeutung liegt dabei im Gegensatz zur reellen Analysis weniger in der Aussage selbst und ihrer Bedeutung für die praktische Berechnung von Integralen, sondern darin, dass aus ihm drei der wichtigen Sätze der Funktionentheorie folgen, der cauchysche Integralsatz und daraus dann die cauchysche Integralformel und der Residuensatz. Es sind diese Sätze, die zur Berechnung von komplexen Integralen herangezogen werden.
Sei γ eine komplexe Kurve mit Parameterintervall [a,b] und F eine komplexe Funktion auf der offenen Menge U, die den Abschluss von γ enthält. Hierbei sei F komplex differenzierbar auf U und stetig auf dem Abschluss von γ. Dann ist
Insbesondere ist dieses Integral Null, wenn γ eine geschlossene Kurve ist. Der Beweis führt das Integral einfach auf reelle Integrale von Realteil und Imaginärteil zurück und benutzt den reellen Hauptsatz.
Mehrdimensionale Verallgemeinerungen
Abstrakt gesprochen hängt der Wert eines Integrals auf einem Intervall nur von den Werten der Stammfunktion am Rand ab. Dies wird auf höhere Dimensionen durch den gaußschen Integralsatz verallgemeinert, der das Volumenintegral der Divergenz eines Vektorfeldes F mit einem Randintegral in Verbindung bringt.
Es sei
 kompakt mit abschnittsweise glattem Rand S, der Rand sei orientiert durch ein äußeres Normalen-Einheitsfeld n, ferner sei das Vektorfeld F stetig auf V und stetig differenzierbar im Inneren von V. Dann gilt
kompakt mit abschnittsweise glattem Rand S, der Rand sei orientiert durch ein äußeres Normalen-Einheitsfeld n, ferner sei das Vektorfeld F stetig auf V und stetig differenzierbar im Inneren von V. Dann giltNoch allgemeiner betrachtet der Satz von Stokes Differentialformen auf Mannigfaltigkeiten:
M sei eine orientierte n-dimensionale differenzierbare Mannigfaltigkeit mit abschnittsweise glattem Rand
 mit induzierter Orientierung. Dies ist für die meisten anschaulichen Beispiele, wie die Vollkugel mit Rand (Sphäre), gegeben. Ferner sei ω eine stetig differenzierbare Differentialform vom Grad n − 1. Dann gilt
mit induzierter Orientierung. Dies ist für die meisten anschaulichen Beispiele, wie die Vollkugel mit Rand (Sphäre), gegeben. Ferner sei ω eine stetig differenzierbare Differentialform vom Grad n − 1. Dann giltwobei d die Cartan-Ableitung bezeichnet.
Literatur
- C. H. Edwards Jr.: The Historical Development of the Calculus, 1979, Springer New York
- Otto Forster: Analysis 1. Differential- und Integralrechnung einer Veränderlichen. Vieweg, Braunschweig 72004. ISBN 3-528-67224-2
- Harro Heuser, Lehrbuch der Analysis. Teil 1. 8. Auflage, B. G. Teubner, Stuttgart 1990. ISBN 3-519-12231-6
- Konrad Königsberger: Analysis 1, Springer, Berlin 2004, ISBN 3-540-41282-4
- H. A. Priestley, Introduction to Complex Analysis, Oxford Science Publications, revised edition, 1995.
Einzelnachweise







Wikimedia Foundation.