- Einphasenreihenschlussmotor
-
Der Einphasen-Reihenschlussmotor ist ein Elektromotor, der mit Gleich- oder Wechselstrom läuft, ohne Veränderungen am Motor vornehmen zu müssen. Er ist mit dem Gleichstromreihenschlussmotor bis auf wenige Details identisch. Kleinere Einphasen-Reihenschlussmotoren werden auch Universalmotor oder Allstrommotor genannt.
 Schaltzeichen Universalmotor
Schaltzeichen UniversalmotorInhaltsverzeichnis
Grundlagen
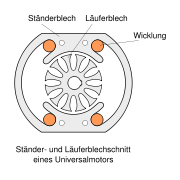 Ständer- und Läuferblechschnitt eines Universalmotors
Ständer- und Läuferblechschnitt eines UniversalmotorsDer Aufbau des Einphasen-Reihenschlussmotors ist fast identisch mit dem der Reihenschluss-Gleichstrommaschinen. Er unterscheidet sich in seiner Bauform nur durch das gedrungene Ständerpaket, das mit den Polschuhen eine Einheit bildet, vom normalen Gleichstromreihenschlussmotor. Zum Reduzieren der Wirbelstromverluste, die durch das Wechselfeld entstehen, muss der gesamte Magnetkreis geblecht ausgeführt sein (Dynamoblech). Die prinzipielle Wirkungsweise des Einphasen-Reihenschlussmotors ist gleich wie bei der Gleichstrommaschine. Wegen der Serienschaltung der Anker- und Erregerwicklung sind der Erregerstrom (Erregerfeld) und der Ankerstrom gleichphasig, das heißt, Erregerstrom und Ankerstrom ändern gleichzeitig das Vorzeichen, Kraft- und Drehrichtung bleiben gleich.
Einphasen-Reihenschlussmotoren sind zwar für Wechselspannung ausgelegt, können aber auch mit Gleichspannung betrieben werden. Umgekehrt lässt sich ein Gleichstrommotor jedoch nicht mit Wechselstrom betreiben, da dann meist störende Wirbelströme im Ständer, Selbstinduktionsspannungen durch Streufelder von Anker und Erregerwicklung auftreten würden. Aufgrund des induktiven Blindwiderstandes ist die Leistung an Wechselspannung um 15 % kleiner als an Gleichspannung. Kleine Einphasenreihenschlussmotoren werden heute als Universalmotoren bis zu einer Nennleistung von 3 Kilowatt und einer Nenndrehzahl von 3000 bis zu 30.000 Umdrehungen pro Minute ausgeführt. Aufgrund der hohen Drehzahl können diese Universalmotoren kleiner gebaut werden. Da in kleinen Motoren die Stromdichte sehr groß ist, entsteht eine hohe Verlustleistung, der Motor erwärmt sich. Dieses Problem wird aber durch die hohe Drehzahl wieder behoben (Kühlung).
Aufbau
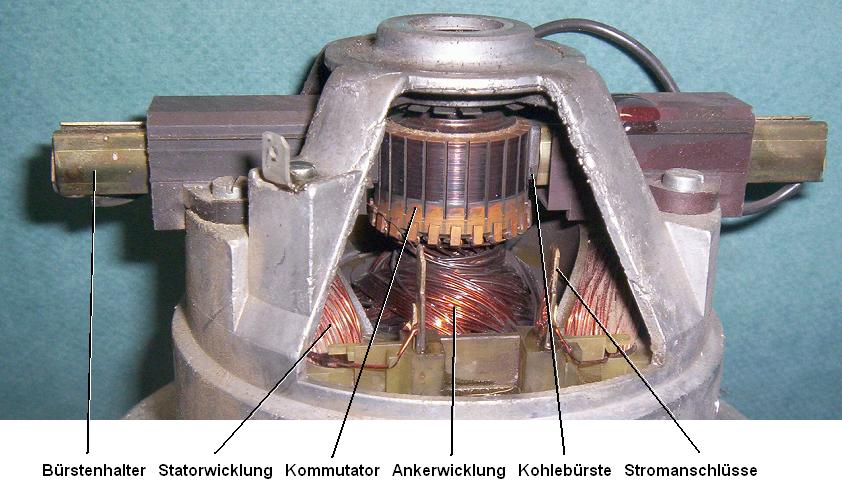
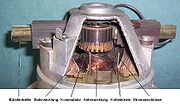 Universalmotor für ca. 500 Watt
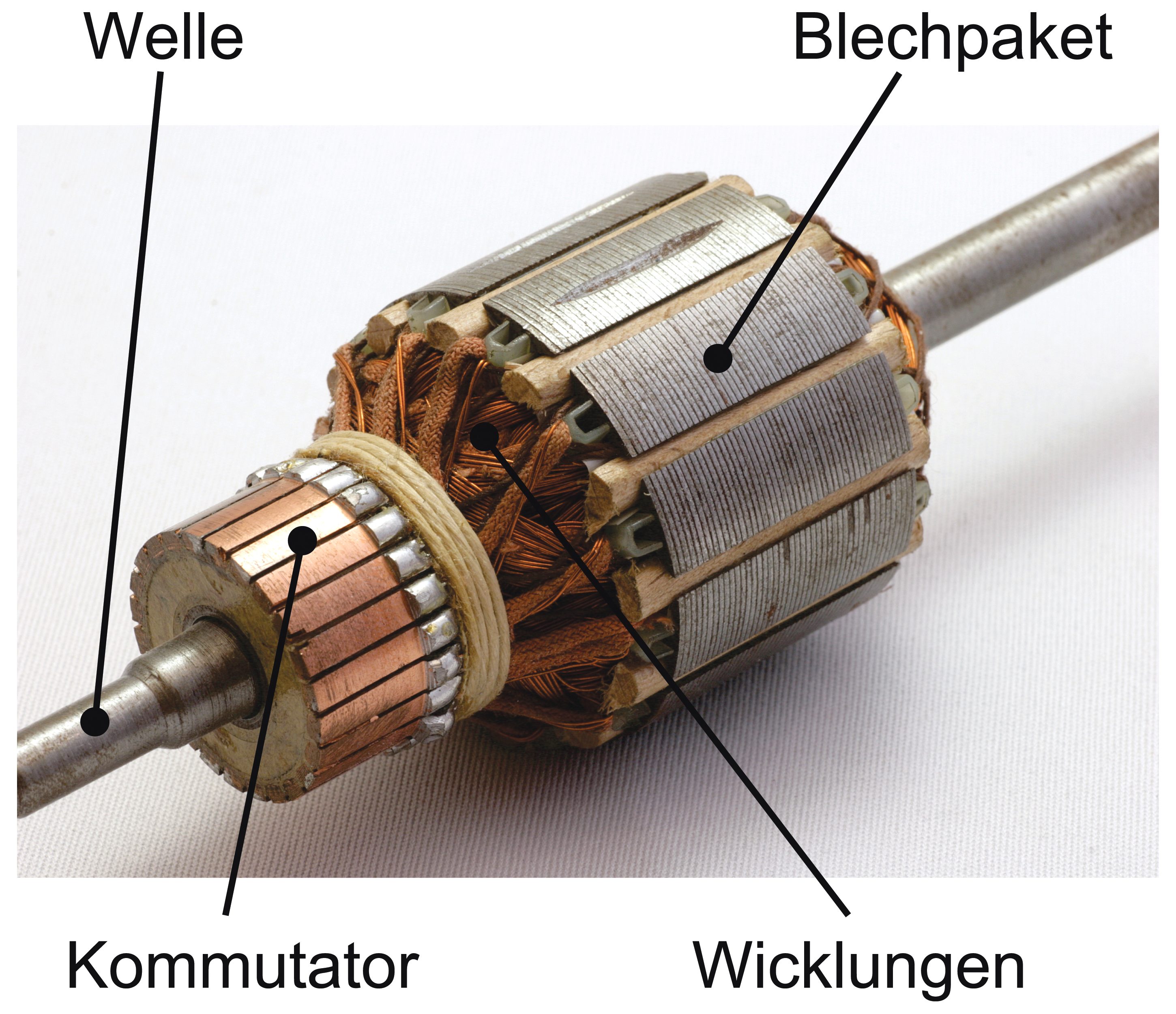
Universalmotor für ca. 500 Watt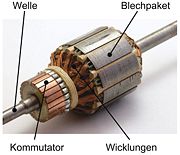 Anker eines Universalmotors
Anker eines UniversalmotorsDas Ständergehäuse umfasst den gesamten Motoraufbau und ist bei kleineren Motoren ein Gussteil, bei größeren Motoren eine Schweißkonstruktion. Kleinere Motoren können am Ständergehäuse Kühlrippen haben, größere Motoren dagegen Hohlräume zur Kühlluftführung. Der Motor besteht aus einem Stator, der wie jener des Gleichstrommotors ausgeprägte Pole besitzt, im Unterschied zu diesem aber als Blechpaket ausgeführt ist. Allerdings haben Motoren für große Leistungen keine ausgeprägten Pole mehr, bei ihnen besteht der Stator aus gestanzten Dynamoblechprofilen. Die magnetisch aktiven Teile von Ständer und Anker sind aus „Paketen“ von einseitig gegen Wirbelströme isolierten Dynamoblechen zusammengesetzt. Diese werden als gesamter Ring oder als einzelne Segmente ausgestanzt. Das Blechpaket wird in den Ständer eingepresst oder eingeschrumpft. Sowohl Ständer- als auch Ankerblechpaket sind meist so geformt, dass sie statt nur einem eine Vielzahl von Polpaaren ausprägen.
Die elektrisch aktiven Teile bestehen im Wesentlichen aus der Ständer- bzw. Erregerwicklung und der Ankerwicklung. Da die Erregerwicklung symmetrisch zum Anker aufgeteilt ist, wirken die Teilspulen der Erregerwicklung wie Drosselspulen und tragen somit zur Funkentstörung bei. Die Erregerwicklungen und die Ankerwicklung sind hintereinander, bzw. „in Reihe“ geschaltet. Dabei liegt vor der Ankerwicklung jeweils eine Erregerwicklung (Hauptwicklung). Die Reihenschlusswicklung hat nur wenige Windungen, allerdings mit großem Querschnitt. Die Kupferdrahtwicklungen werden in Nuten des Ständer- und des Ankerblechpakets gewickelt oder als vorgefertigte Wicklungen eingelegt. In den Nuten wurde zuvor auch eine Isolationsmaterial-Schicht eingelegt. Zur elektrischen Isolation der Drähte gegeneinander und zur Stabilisierung können die Wicklungen mit Speziallack getränkt und getrocknet sein.
Der Rotor ist mit dem des Gleichstrommotors identisch. Der rotierende Anker besteht aus dem auf der Achswelle aufgebrachten Ankerblechpaket und der Ankerspulenwicklung. Die Ankerwelle ist im Ständergehäuse gelagert und überträgt das Drehmoment des elektrischen Antriebs auf die mechanisch verbundene Maschine oder das Getriebe. Auf einer Seite des Ankerblechpakets ist der Kommutator bzw. Kollektor angebracht, durch den die Ströme der Ankerspulenwicklung über die im Ständer angebrachten Kohlebürsten zur Ständerwicklung oder zu den Anschlüssen geleitet werden.
Entsprechend dem Anwendungszweck sind am Ständergehäuse Befestigungsvorrichtungen vorhanden. Fahrmotoren für elektrische Bahnen haben spezielle Vorrichtungen zur federnden Aufhängung zwischen der Trägerkonstruktion (Drehgestell oder Lokomotivkasten) und dem Zahnradgetriebe auf der
Radsatzachse.Wirkungsweise
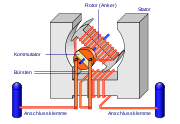 Prinzipielle Darstellung zur Wirkungsweise
Prinzipielle Darstellung zur Wirkungsweise Schaltbild eines Universalmotors
Schaltbild eines UniversalmotorsPrinzip
Die stromdurchflossene Erregerwicklung im Ständer erzeugt ein Magnetfeld, das durch das Eisenblechpaket verstärkt und zu definierten Polen gebündelt wird. Das gleiche geschieht in der nachgeschalteten Ankerspulenwicklung. Dieses vom Stator aufgebaute Magnetfeld bewirkt, je nachdem wie die Pole eingestellt sind, dass es den Rotor hinter sich herzieht oder vor sich herschiebt. Dabei müssen die Spulen bei jeder halben Umdrehung umgepolt werden, wozu ein Kommutator notwendig ist.
Betrachtet man eine nur „einpolige“ Ausführung, so stehen beide Magnetfelder quer zueinander. Gemäß den physikalischen Gesetzen entstehen Kräfte, die die beiden Magnetfelder zu einem unipolaren gemeinsamen Feld zu vereinigen suchen. Durch diese Kraftwirkung wird der Anker gedreht. Da jedoch bei jeder Ankerdrehung am Kommutator ein elektrischer Polwechsel erfolgt, stellt sich der Ursprungszustand des Magnetfelds jedes Mal von neuem ein, so dass eine fortwährende Drehung erfolgt, solange der Strom durch Anker- und Erregerwicklung fließt.
Die durch den Wechselstrom bewirkte fortwährend wiederholte Umpolung hat keinen Einfluss auf das Laufverhalten, da stets beide Wicklungen gleichzeitig „umgepolt“ werden. Bei Betrieb mit sinusförmigem Wechselstrom folgt das Drehmoment einer Sinuskurve mit doppelter Netzfrequenz. Die Minima dieser Sinuskurve liegen leicht im Negativen. Bei Betrieb mit Gleichstrom erzeugt der Kommutatormotor ein zeitlich konstantes Drehmoment.
Stromwendung
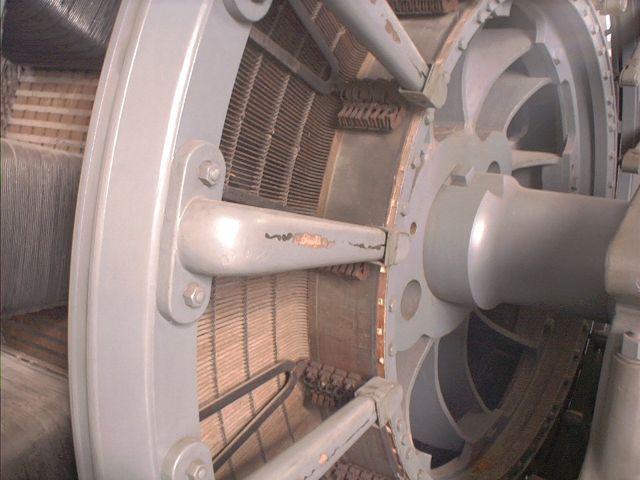
 Kommutator eines großen Elektromotors
Kommutator eines großen ElektromotorsZur Stromwendung werden bei Motorbetrieb die Bürsten gegen die Drehrichtung verschoben, der Hauptpolfluss induziert in der kommutierenden Spule eine Bewegungsspannung, die die Kommutierung unterstützt. Bei Generatorbetrieb müssen die Bürsten in Drehrichtung verschoben werden, dabei hängt die Bürstenverschiebung vom Betriebszustand ab. Eine vollständige Kompensation ist nur in einem bestimmten Betriebspunkt möglich (Nennpunkt). Eine Bürstenverschiebung zur Verbesserung der Stromwendung führt aber zu einer Feldschwächung der Erregerpole (ΘA hat Komponente entgegen ΘE); Stabilität der Maschine beachten.
Da sich der Kommutator nicht anpasst (also stets senkrecht zu den Hauptfeldlinien umschaltet und nicht senkrecht zu den „effektiven“ Feldlinien), kann das Bürstenfeuer verringert werden, indem der Bürstenträger leicht verdreht montiert wird und dann im Betriebszustand doch senkrecht zu den effektiven Feldlinien umschaltet. Dies erfordert jedoch eine Justierung im Betrieb und wird heute aus Kostengründen kaum noch durchgeführt. Stattdessen werden in großen Maschinen Wendepolwicklungen und Kompensationswicklungen eingesetzt, die die Feldlinien gleichsam in die ideale Lage „zurückbiegen“. Wendepole werden nur bei größeren Einphasen-Reihenschlussmotoren wie dem Bahnmotor verwendet. Kleine Einphasenreihenschlussmotoren haben keine Wendepole und keine Kompensationswicklung.
Probleme
Die sinusförmige Umpolung des Statorfeldes induziert im Rotor eine Spannung, die an den Bürsten abfällt. Diese transformatorische Spannung Utr kann durch Bürstenverschiebung nicht kompensiert werden. Daher gibt es, im Unterschied zur Gleichstrommaschine, eine induzierte Wechselspannung an den Kohlebürsten, die zu einem ständigen Bürstenfeuer und einem hohen Verschleiß der Bürsten führt (Abhilfe schaffen jedoch Wendepolwicklungen und Kompensationswicklungen). Neben dem damit verbundenen Zwang zur Funkentstörung dieses Motors durch Kondensatoren wird dadurch auch die Lebensdauer des Motors im Vergleich mit Drehfeldmaschinen stark reduziert.
Betriebsverhalten
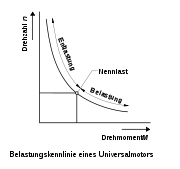 Belastungskennlinie eines Universalmotors
Belastungskennlinie eines UniversalmotorsBeim Einphasenreihenschlussmotor sinkt der Erregerstrom mit ab, das führt zu einer Drehzahlsteigerung bei sinkendem Drehmoment. Er hat keine feste Grenzdrehzahl, wodurch größere Einheiten unbelastet bis zum Bersten des Ankers hochlaufen würden. Aus diesem Grund wird zur Absicherung bei einigen Motoren ein Fliehkraftschalter auf die Motorwelle montiert. Dieser Schalter schaltet bei kritischen Motordrehzahlen einen ohmschen Widerstand zu, oder schaltet den Motor ganz ab.
- Im Stillstand beim Einschalten fließt der höchste Strom durch Anker- und Ständerwicklung.
- Der Reihenschlussmotor hat von allen Elektromotoren das größte Anlauf-Drehmoment.
- Im Leerlauf bzw. ohne oder mit geringer Belastung betriebene Reihenschlussmotoren gehen mit ständig zunehmender Drehzahl durch.
- Bei Belastung nimmt die Drehzahl ab, während das Drehmoment durch die verringerte Drehzahl wieder ansteigt, es pendelt sich dabei ein stabiler Zustand ein.
- Die Drehzahl ist sehr lastabhängig.
Mathematische Betrachtung
Ersatzschaltbild
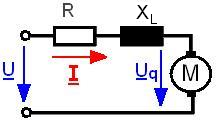
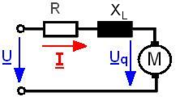 Ersatzschaltbild eines Einphasenreihenschlussmotors
Ersatzschaltbild eines Einphasenreihenschlussmotors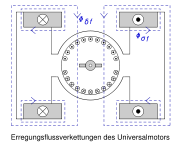 Erregungsflussverkettung eines Universalmotors
Erregungsflussverkettung eines UniversalmotorsDa die Maschine mit Wechselstrom betrieben wird, sind außer den ohmschen Widerständen der Wicklungen auch alle induktiven Widerstände zu berücksichtigen. Die Blindwiderstände werden zu einer Reaktanz zusammengefasst:
- X = XEh + XEσ + XA + XW + XK
- X … gesamte Reaktanz
- XEh + XEσ … Reaktanz der Erregerwicklung
- XA … Reaktanz der Ankerwicklung
- XW … Reaktanz der Wendepolwicklung (falls vorhanden)
- XK … Reaktanz der Kompensationswicklung (falls vorhanden)
X ist von der Sättigung des magnetischen Kreises abhängig (vor allem XE, h Hauptfeld, σ Streufeld). X sinkt daher mit zunehmender Belastung. X wird für die weitere Ableitung konstant angenommen.
Da die Achse der Ankerwicklung senkrecht zu der Erregerwicklung steht, wird in der Ankerwicklung keine transformatorische Spannung induziert, das heißt, nur die Bewegungsspannung ist gleichphasig mit dem Feld und Strom).
Drehmoment
Die Drehmomentengleichung ist gleich wie bei der Gleichstrommaschine. Hier sind aber für Strom und Spannung die Effektivwerte einzusetzen.
- Mi … inneres Drehmoment
- Uq … Effektivwert der Ankerspannung
- I … Effektivwert des Ankerstroms
- n … Drehzahl
Bei Belastung der Maschine gilt:
- Mi = MW + MV
- MW … Belastungsmoment
- MV … Verlustmoment
Aufgrund des Trägheitsmoments der Maschine und der Last stellt sich eine mittlere Drehzahl ein. Infolge des pulsierenden Drehmomentes ist dieser mittleren Drehzahl aber eine pendelnde Drehzahl überlagert.
Drehmomentengleichung aus der inneren Leistung abgeleitet
Das Moment mi(t) pulsiert mit doppelter Netzfrequenz.
In kommutierender Spule induzierte Spannungen
Transformatorische Spannung
Die Spulenachse der kommutierenden Spule stimmt mit der Erregerfeldachse überein, das heißt, in der kommutierenden Spule wird vom veränderlichen Erregerfeld eine transformatorische Spannung induziert.
- utr … Transformatorische Spannung
- Φ … magnetischer Fluss
- f1 … Netzfrequenz
- Nsp … Windungszahl pro Spule
Die transformatorische Spannung ist proportional zur Netzfrequenz, aber unabhängig von der Drehzahl (sie tritt auch im Stillstand auf) und eilt dem Strom 90° vor.
Reaktanzspannung
Die Reaktanzspannung wirkt der Stromänderung entgegen. Kommutierungszeit = tK. Die Stromänderung ΔI hängt vom Kommutierungszeitpunkt ab → Reaktanzspannung hängt vom Kommutierungszeitpunkt ab.
- Ur … Reaktanzspannung
Bewegungsspannung
Da das Wendefeld zeitlich sinusförmig variiert, hängt auch die induzierte Bewegungsspannung vom Kommutierungszeitpunkt ab.
- uw(t) = 2NsplvBw(t)
- uw … Spannung des Wendefeldes
- v … Umfangsgeschwindigkeit des Ankers
- Bw … Magnetische Flussdichte des Wendefeldes
- + mit Wendepol
- − ohne Wendepol
Mit den Wendepolen kann die transformatorische Spannung nicht kompensiert werden.
- Abhilfe
- Wendepole + Parallelwiderstand
Die Funkenspannung kann nur für eine bestimmte Drehzahl voll kompensiert werden. Im Stillstand ist die transformatorische Spannung durch die Wendepole nicht kompensierbar, das heißt, Utr muss klein gehalten werden.
- Utr = jctrf1I =
- Abhilfe
- f1 klein → D-A-CH-Bahnstromnetz mit 16 2/3 Hz,
- Fluss pro Pol klein → große Polpaarzahl
Stromortskurve
Mit der Stromortskurve erhält man eine Beziehung für die Stromzeiger zwischen der Impedanz und mit der Drehzahl n als reelle Variable. Wie bei der Asynchronmaschine entsteht durch Invertierung ein Kreis. Jedem Stromzeiger kann mit einem gewählten Widerstandsmaßstab eine feste Drehzahl zugeordnet werden. Die untere Hälfte kann nicht wie bei der Asynchronmaschine zur Konstruktion der Strompfeile im Generatorbetrieb verwendet werden.
Der maximale Strom ergibt sich für:
- I … Strom
- U … Spannung
- Z … Impedanz
- n1 … fiktive synchrone Drehzahl (die ein Synchronmotor mit demselben Aufbau hätte)

- f1 … Frequenz
- p … Polpaarzahl
- NE … Erregerwindungszahl
- XEh … Reaktanz der Erregerwicklung
 … Phasenverschiebungswinkel
… Phasenverschiebungswinkel
- X … Reaktanz
Besonderheiten
Besonderheiten gegenüber Gleichstrommotoren
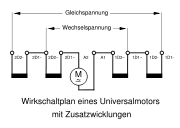 Wirkschaltplan eines Universalmotors mit Zusatzwicklungen
Wirkschaltplan eines Universalmotors mit Zusatzwicklungen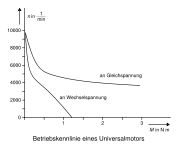 Betriebskennlinie bei Gleichstrom bei Wechselstrom
Betriebskennlinie bei Gleichstrom bei WechselstromDas magnetische Feld eines Wechselstrombahnmotors pulsiert mit der Frequenz f und induziert in den unter den Bürsten kurzgeschlossenen Läuferwindungen eine für die Kommutierung schädliche Spannung. Diese Spannung heißt transformatorische Spannung (Utr), diese ist proportional abhängig von der Frequenz, der Windungszahl und dem magnetischen Fluss. Die anderen in der kurzgeschlossenen Windung auftretenden Spannungen sind:
- die Reaktanzspannung (Ur), die vom Läuferstrom und der Drehzahl proportional abhängig ist (die Reaktanzspannung entsteht durch das Umpolen des Streuflusses der kommutierenden Spule)
- die vom nicht kompensierten Läuferrestfeld herrührende Spannung (Ua), die ebenfalls vom Läuferstrom und der Drehzahl abhängig ist
Diese Spannungen werden durch die Wendefeldspannung, die ebenfalls vom Läuferstrom und der Drehzahl abhängig ist, kompensiert. Utr', Ur und Ua bilden zusammen die so genannte Funkenspannung Uf. Die transformatorische Spannung lässt sich mit einfachen Mitteln nicht für den gesamten Drehzahlbereich kompensieren. Würde man die Wendefeldspannung in der Phase verschieben, so könnte man die Funkenspannung vollkommen kompensieren. Dieses ist durch das Parallelschalten eines ohmschen Widerstandes (Wendepol-Shuntwiderstand), zur Wendepolwicklung, für einen bestimmten Arbeitspunkt, möglich.
Die transformatorische Spannung ist beim Anlaufen am größten und darf bestimmte Werte nicht überschreiten. Um Utr klein zu halten, können folgende Maßnahmen ergriffen werden. Diese finden in der Regel nur bei großen Motoren Anwendung:
- Verkleinern des Erregerflusses je Pol (das führt zu großen Polzahlen), um große Leistungen zu erhalten
- sowie Windungszahl gleich 1 und Schleifenwicklung. Das erfordert wiederum eine hohe Läuferspulenzahl und deshalb eine große Lamellenzahl, die aber aus mechanischen Gründen begrenzt ist.
Damit der durch die transformatorische Spannung angetriebene Strom verringert wird, verwendet man teilweise Spreizkohlebürsten, die den Widerstand zwischen den kurzgeschlossenen Spulen am Kollektor erhöhen.
Damit der Leistungsfaktor möglichst nahe bei 1 liegt, muss die rotatorische Spannung groß sein. Das ist durch eine große Lamellenanzahl, eine niedrige Frequenz und eine hohe Drehzahl möglich. Die Leistung ist proportional der Polpaarzahl, dem magnetischen Fluss, dem Läuferstrombelag und der Läuferumfangsgeschwindigkeit. Die Polpaarzahl ist wegen der konstruktiv möglichen Bürstenhalterteilung begrenzt. Wegen der transformatorischen Spannung ist der magnetische Fluss, aus thermischen Gründen der Läuferstrombelag und aus mechanischen Gründen die Läuferumfangsgeschwindigkeit begrenzt. Die Motorspannung wird durch die Lamellenanzahl und die Polpaarzahl (wegen der zulässigen Lamellenspannung) festgelegt. Hervorgerufen durch die induktiven Widerstände tritt eine Phasenverschiebung zwischen dem Strom und der Spannung auf. Das pulsierende Drehmoment von doppelter Netzfrequenz erhält dadurch einen negativen Anteil in Abhängigkeit von der Phasenverschiebung. Die Umkehr der Drehmomentrichtung führt zu großen mechanischen Beanspruchungen und zu einem Rütteln der Motoren, besonders beim Anlauf.
Einen Gleichstromnebenschlußmotor mit Wechselstrom zu betreiben, wäre somit unsinnig, da durch die Induktivität des Stators eine Phasendifferenz zwischen Stator- und Rotorstrom von 90° entstehen würde, die das erzeugte mittlere Moment zu Null machen würde.
Unterschiede zwischen 16 2/3- und 50-Hertz-Motoren
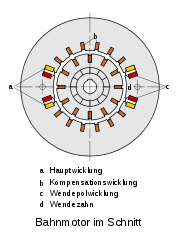 Bahnmotor im Schnitt
Bahnmotor im SchnittFür 50-Hertz-Motoren gelten dieselben Gesetzmäßigkeiten wie für 16-2/3-Hertz-Motoren, nur spielt hierbei die transformatorische Spannung eine noch größere Rolle. Wegen der dreifachen Frequenz würde diese auch dreimal so groß werden. Deshalb muss man besondere Maßnahmen ergreifen, um dieses zu verhindern. Bei gleichen Bauprinzipien kann man, bei gleicher transformatorischer Spannung, nur 1/3 der Leistung von 16 2/3-Hertz-Motoren erreichen. Um dieses zu verhindern muss man den magnetischen Fluss auf 1/3 gegenüber 16-2/3-Hz-Motoren verringern, in dem man entweder die Eisenlänge auf 1/3 verkürzt oder eine dreifache Polpaarzahl. Die Polpaarzahl kann aber nicht beliebig erhöht werden (Bürstenhalterteilung !). Die niedrige Frequenz von 16 2/3 Hertz erleichtert die Kommutierung.
Wenn die Eisenlänge jedoch auf 1/3 verkürzt ausgeführt wird und die Polpaarzahl beibehalten wird, so lassen sich zwei Teilmotoren auf einer gemeinsamen Welle unterbringen, diese Motoren nennt man dann Tandemmotoren. Mit diesen Motoren lassen sich dann bei gleichen Einbauverhältnissen 2/3 der Leistung von 16 2/3-Hertz-Motoren erreichen. Derartige Tandemmotoren sind allerdings äußerst kompliziert und teuer. Letztlich haben sie, wie auch 16-2/3-Hertz-Motoren, an Bedeutung verloren, da Drehstromasynchronantriebe einige Vorteile bieten.
Drehzahlstellung
- Regelung der Klemmenspannung
- U < UN → Verringerung der Drehzahl. Die Drehzahlkennlinien werden nach unten verschoben. Bei kleinen Spannungen haben X und R einen größeren Einfluss. Der hyperbolische Verlauf der Kennlinien verändert sich etwas.
- Gleichstromzusatzwicklung
- Im Gleichstrombetrieb fallen die induktiven Spannungsabfälle weg. Bei gleichen Betriebsbedingungen (Spannung, Strom) ist daher die Leerlaufdrehzahl bei Gleichstrom größer. Durch eine Anzapfung der Erregerwicklung können die Leerlaufdrehzahlen gleich gemacht werden.
- Wicklungsanzapfungen
- Wird die Windungszahl der Erregerwicklung vermindert, sinkt bei konstantem Strom das Erregerfeld → die Drehzahl steigt an.
- Vorwiderstand
- Durch einen Vorwiderstand wird bei konstantem Strom die Maschinenspannung reduziert, die Drehzahl-Drehmomenten-Kennlinie wird nach unten verschoben. Durch diese Drehzahlstellmethode sinkt der Wirkungsgrad, weil Spannung am Vorwiderstand abfällt.
- Parallelwiderstand
- Der Eregerstrom und der Erregerfluss werden durch den Strom über den Parallelwiderstand verstärkt. Die Drehzahl-Drehmomentenkennlinien werden für kleineren Parallelwiderstand nach unten verschoben und flacher. Da auch im Leerlauf ein Erregerstrom fließt (Vorwiderstand), wird die Leerlaufdrehzahl begrenzt.
- Barkhausenschaltung
- Kombination von Vorwiderstand und Parallelwiderstand ermöglicht einen großen Drehzahlbereich. Über den Parallelwiderstand wird die Leerlaufdrehzahl eingestellt, über den Vorwiderstand die Kennlinie verschoben.
- Phasenanschnittsteuerung
- Mit der Phasenanschnittsteuerung ist eine praktisch verlustlose und feinstufige Regelung der Drehzahl möglich. Während einer Halbperiode wird der Strom jeweils für eine bestimmte Zeit unterbrochen, das heißt, Effektivwert von Strom und Spannung werden verändert, dies führt zu einer Änderung des Moments und der Drehzahl.
Vor- und Nachteile
Vorteile
- Gute Drehzahlstellmöglichkeiten
- großes Moment bei kleiner Drehzahl
- großes Anzugsmoment (Vorteilhaft für Rührwerke,Schalter;Bohrmaschinen)
Nachteile
- höhere Herstellungskosten als Asynchronmaschine
- Drehzahländerung bei Belastung (hyperbolischer Verlauf)→ für konstante Drehzahl ist eine Regelung nötig
- Bürstenapparat, Kommutator wartungsbedürftig
- Bürstenfeuer
- Funkenentstörung nötig
Anwendungsbereiche
Als Bahnmotoren wurden früher Einphasenreihenschlussmotoren (mit kleinen Wendepolen und Kompensationswicklungen) eingesetzt. Dazu wurde die Betriebsspannung von 15000 Volt auf ca. 20 Volt bis ca. 600 Volt mittels Traktionstransformator und zugehörigem Stufenwähler heruntertransformiert. Zur Vermeidung von unsymmetrischer Belastung dürfen große Einphasen-Reihenschlussmotoren nicht am öffentlichen Netz betrieben werden.
Heute gehören Einphasenreihenschlussmotoren als Universalmotoren zu den wichtigsten Kleinmotoren. Neben dem Antrieb für Elektrowerkzeuge wird dieser Motor in praktisch jedem elektrischen Haushaltsgerät eingesetzt. Oft sind diese Geräte mit einem Stufenschalter ausgerüstet, mit dem für verschiedene Belastungsfälle zwischen Anzapfungen der Feldwicklung umgeschaltet werden kann. Ihre geringe Lebensdauer verbietet aber ihren Dauereinsatz.
Auch in Waschmaschinen sind sie oft zu finden – hierfür müssen sie jedoch umpolbar und mit einem Tachogenerator ausgestattet sein, um Drehrichtung und Drehzahl steuern zu können. Der Einsatzvorteil besteht hier darin, mit einem einfachen Motor ohne Getriebeumschaltung sowohl waschen als auch schleudern zu können.
Anwendungsbeispiele
- Haushaltsgeräte
- Staubsauger
- Rühr-, Knet- und Schneidemaschinen
- Mixer
- Waschmaschinen
- Elektrowerkzeuge
- Handbohrmaschinen
- Winkelschleifer
- Handkreissägen
Normen und Regelwerke
- EN 60 034 Teil 1 Allgemeine Bestimmungen für umlaufende elektrische Maschinen
- EN 60 034 Teil 8 Anschlussbezeichnungen und Drehsinn für elektrische Maschinen
- DIN IEC 34 Teil 7 Bauformen umlaufende elektrische Maschinen
- EN 60034-5 Schutzarten umlaufender elektrischer Maschinen
- EN 60034-6 Kühlarten, drehende elektrische Maschinen
Literatur
- Hans Günter Boy, Horst Flachmann, Otto Mai: Die Meisterprüfung Elektrische Maschinen und Steuerungstechnik. 4. Auflage, Vogel Buchverlag, Würzburg ISBN 3-8023-0725-9
- Günter Springer: Fachkunde Elektrotechnik. 18. Auflage, Verlag Europa-Lehrmittel, Wuppertal 1989, ISBN 3-8085-3018-9
- Detlev Roseburg: Elektrische Maschinen und Antriebe. Fachbuchverlag Leipzig im Carl Hanser Verlag, 1999, ISBN 3-446-21004-0
- A. Senner: Fachkunde Elektrotechnik. 4. Auflage. Verlag Europa-Lehrmittel, Wuppertal 1965
- Ernst Hörnemann, Heinrich Hübscher: Elektrotechnik Fachbildung Industrieelektronik. 1 Auflage. Westermann Schulbuchverlag GmbH, Braunschweig 1998, ISBN 3-14-221730-4
- Andreas Kremser: Elektrische Maschinen und Antriebe, Grundlagen, Motoren und Anwendungen. 2. Auflage, Teubner Verlag, Stuttgart 2004, ISBN 3-519-16188-5
Siehe auch
Weblinks
















Wikimedia Foundation.