- Quadrik
-
Im mathematischen Gebiet der analytischen Geometrie versteht man unter einer Quadrik eine Kurve in der Ebene, eine Fläche im dreidimensionalen Raum oder eine Hyperfläche in einem höherdimensionalen euklidischen Raum, die durch eine quadratische Gleichung mehrerer Variablen beschrieben wird. Es handelt sich somit um das Nullstellengebilde einer quadratischen Funktion mehrerer Variablen. Im Fall von Kurven in der Ebene handelt es sich im Wesentlichen um die Kegelschnitte. Im Dreidimensionalen spricht man auch von einer Fläche zweiter Ordnung.
Zum Beispiel beschreibt die Gleichung
- 2x2 + 3y2 = 5
eine Ellipse in der Ebene. Die Gleichung
- x2 + y2 − z2 = 1
beschreibt ein einschaliges Hyperboloid im dreidimensionalen Raum. Allgemein hat die Gleichung eines Kegelschnitts in der Ebene die Form
- ax2 + bxy + cy2 + dx + ey + f = 0,
die einer Quadrik im dreidimensionalen Raum die Form
- ax2 + bxy + cxz + dy2 + eyz + fz2 + gx + hy + iz + j = 0.
Inhaltsverzeichnis
Definitionen
Quadrik
Allgemein kann man quadratische Funktionen und Quadriken in endlich-dimensionalen Vektorräumen oder affinen oder euklidischen Räumen definieren. Durch die Wahl eines geradlinigen bzw. kartesischen Koordinatensystems kann man jedem Punkt des affinen Raums ein Koordinaten-n-Tupel zuordnen. Dadurch wird der affine Raum mit dem Raum der n-Tupel
 identifiziert. Der Einfachheit halber wird im folgenden der Raum betrachtet. Quadratische Funktionen und Quadriken lassen sich übersichtlich mit Hilfe von Matrizen definieren und beschreiben.
identifiziert. Der Einfachheit halber wird im folgenden der Raum betrachtet. Quadratische Funktionen und Quadriken lassen sich übersichtlich mit Hilfe von Matrizen definieren und beschreiben.Ist A eine symmetrische
 -Matrix, L ein Zeilenvektor mit n reellen Einträgen und c eine reelle Konstante, so nennt man die Funktion
-Matrix, L ein Zeilenvektor mit n reellen Einträgen und c eine reelle Konstante, so nennt man die Funktioneine quadratische Funktion. Dabei fasst man
 als Spaltenvektor auf. Ausgeschrieben lautet der Funktionsterm:
als Spaltenvektor auf. Ausgeschrieben lautet der Funktionsterm:Eine Quadrik ist die Menge der Punkte (mit dem Ortsvektor x), deren Koordinaten einer Gleichung genügen, die durch Nullsetzen einer quadratischen Funktion entsteht.
Bemerkung: Ist A zusätzlich eine Diagonalmatrix und L = 0, dann heißt q rein quadratisch.
Die Gleichung jeder allgemeinen Quadrik im obigen Sinn lässt sich durch Translationen und eine Hauptachsentransformation auf rein quadratische Form bringen. Anhand dieser allgemeinen Gleichung kann die Quadrik charakterisiert werden, d.h. bestimmt werden, welche geometrische Figur (nämlich Ellipsoid, Paraboloid, Geradenpaar, …) sie darstellt.
Definitheit
Eine quadratische Funktion
 heißt:
heißt:- positiv definit, falls für alle
 gilt: q(x) > 0
gilt: q(x) > 0 - negativ definit, falls für alle gilt: q(x) < 0
- positiv semidefinit, falls für alle gilt:

- negativ semidefinit, falls für alle gilt:

- indefinit, falls ein existiert mit q(x) > 0 und ein mit q(x) < 0
Beispiele
Kurven zweiter Ordnung
 Beispiel 1.1
Beispiel 1.1
Allgemein für R2→R:
 .
.Eine Kurve zweiter Ordnung wird als Kegelschnitt bezeichnet.
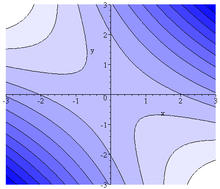
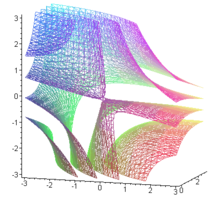
Beispiel 1.1:

- Definitheit: Für x = (1,1) : q(x) > 0 und für x = (1,-1) : q(x) < 0
 q(x) ist indefinit
q(x) ist indefinit
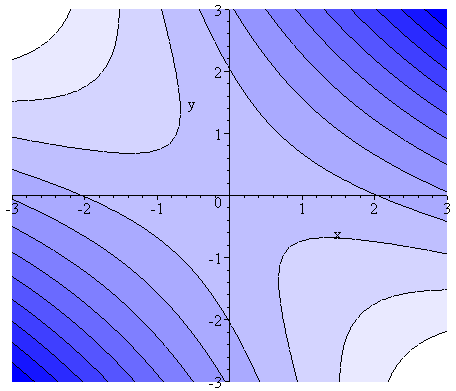
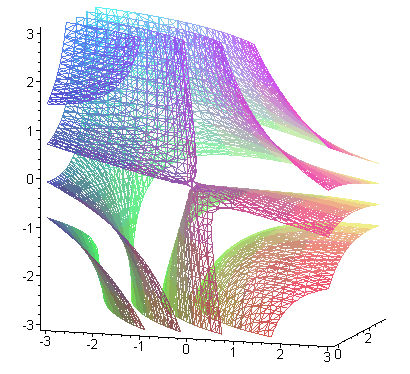
Beispiel 1.2:

- Definitheit: ∀x ≠ 0 : q(x) > 0 ⇒ q(x) ist positiv definit
Als Kurven zweiter Ordnung (Kegelschnitte) können auftreten: Ellipse, Parabel, Hyperbel und Geradenpaar.
Flächen zweiter Ordnung
 Beispiel 2.1
Beispiel 2.1Allgemein für
 :
:Als geometrische Figur kann auftreten: Hyperboloid (einschalig und zweischalig), Ellipsoid, Doppelkegel, Paraboloid (elliptisch und hyperbolisch), Zylinder (elliptisch, parabolisch und hyperbolisch), Ebenenpaar (eventuell konjugiert komplex mit reeller Schnittgerade), Doppelebene.
Beispiel 2.1:

- Definitheit: Für x = (1,1,1) ist q(x) > 0 und für x = (1,1,-1) gilt
 ist indefinit
ist indefinit
Beispiel 2.2:

- Definitheit: Für alle x ungleich 0 gilt:
 ist positiv definit
ist positiv definit
Transformation auf Normalform
Das singuläre Gebilde S einer Fläche zweiter Ordnung ist die Menge aller
 , für die gilt:
, für die gilt:Verschiebung des Koordinatensystems um einen Vektor
aus S führt zum Verschwinden der linearen Glieder in der Gleichung der Fläche zweiter Ordnung. Die Gleichung geht über in:x'1,x'2,x'3 sind die Koordinaten des neuen Koordinatensystems.
Der Ursprung des neuen Koordinatensystems ist der Symmetriepunkt der Fläche 2. Ordnung.
Eine Hauptachsentransformation in ein Koordinatensystem mit festem Ursprung und Koordinatenachsen in Richtung der Eigenvektoren bringt die Gleichung der Fläche zweiter Ordnung in die Normalform:
Klassifizierung einer Quadrik
λ1 λ2 λ3 d Typ >0 >0 >0 <0 Ellipsoid >0 >0 >0 >0 nullteilige Fläche 2. Ordnung (d. h. die leere Punktmenge) >0 >0 >0 =0 entartetes Ellipsoid (Nullpunkt) Kegel mit nichtreellen Erzeugenden >0 >0 <0 <0 einschaliges Hyperboloid >0 >0 <0 >0 zweischaliges Hyperboloid >0 >0 <0 =0 elliptischer Doppelkegel (Kegelachse: x3) >0 >0 =0 >0 Zylinder mit nichtreellen Erzeugenden >0 >0 =0 <0 elliptischer Zylinder >0 >0 =0 =0 Paar einander (in einer reellen Geraden) schneidender nichtreeller Ebenen >0 <0 =0 ≠0 Hyperbolischer Zylinder >0 <0 =0 =0 Paar sich schneidender Ebenen (beide zur z-Achse parallel) >0 =0 =0 <0 2 parallele Ebenen (zur x-Achse senkrecht) >0 =0 =0 >0 2 nichtreelle parallele Ebenen >0 =0 =0 =0 Koordinatenebene (y,z-Ebene) Projektive Quadriken
Jede Quadrik in einem affinen Raum wird durch projektive Erweiterung des Raumes zu einer projektiven Quadrik. Umgekehrt entsteht durch Schlitzen eines projektiven Raumes aus jeder projektiven eine affine Quadrik. Wenn in einem affinen Raum zwei verschiedene Quadriken zum gleichen Typ gehören, dann sind auch ihre projektiven Abschlüsse im zugehörigen projektiven Raum äquivalent, andererseits können Quadriken, deren projektiver Abschluss äquivalent ist, auch zu unterschiedlichen affinen Typen von Quadriken gehören.
Weblinks
- GraphyCalc, 3D-Plotter, basierend auf HTML5 und JavaScript
- Bilder von Quadriken im Raum - Beispiele






Wikimedia Foundation.