- Automated Transfer Vehicle
-
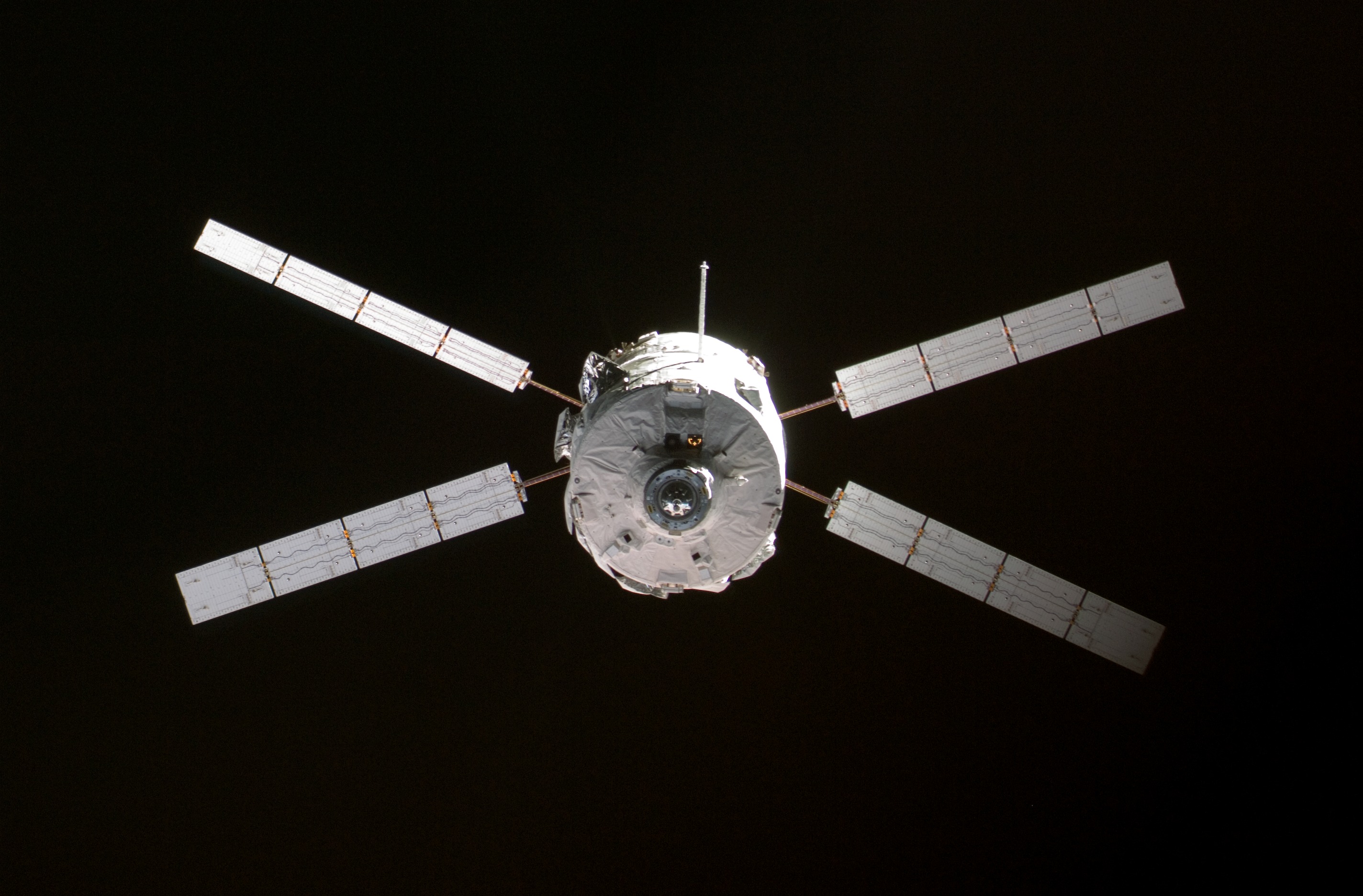
 ATV-1 beim Anflug zur ISS
ATV-1 beim Anflug zur ISS
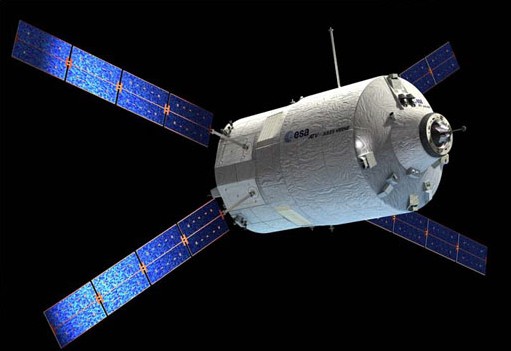
 ATV (Grafik)
ATV (Grafik)Das Automated Transfer Vehicle (ATV; englisch für automatisches Transferfahrzeug) ist ein unbemannter, nicht wiederverwendbarer Weltraumfrachter, der Nachschub wie Nahrung, Wasser, Ausrüstung, Stickstoff, Sauerstoff und Treibstoffe zur Internationalen Raumstation (ISS) transportieren kann. Nach dem Andocken wird er zusätzlich für Ausweichmanöver der Raumstation vor eventuell heranfliegenden Trümmern und für die Anhebung der Umlaufbahn, das so genannte „Reboost“, der ISS gebraucht. Zu diesem Zweck ist das ATV mit einem eigenen wiederzündbaren Antrieb ausgestattet. Das ATV wird im Auftrag der Europäischen Weltraumorganisation (ESA) von der Raumfahrtfirma EADS Astrium Space Transportation in Bremen gebaut und mit Hilfe einer Ariane-5-ES-ATV-Rakete gestartet. Nach den ersten Starts im März 2008 und Februar 2011 sind mindestens drei weitere Flüge für die Jahre 2012 bis einschließlich 2014 geplant.
Inhaltsverzeichnis
Einsatz und Technik
Flugverlauf
Die europäische Trägerrakete Ariane 5 ES ATV startete mit dem ATV an der Nutzlastspitze vom europäischen Weltraumbahnhof in Kourou aus.
 ATV „Jules Verne“, Kopplungsmechanismus
ATV „Jules Verne“, KopplungsmechanismusDas Raumschiff ist mit einem hochentwickelten Navigationssystem ausgerüstet, mit dem es seine Flugbahn selbst berechnen und das Rendezvous-Manöver mit der Raumstation völlig automatisch durchführen kann. Auch weil das ATV an das russische Swesda-Modul andocken sollte, wurde beim Kopplungsmechanismus auf eine russische Entwicklung zurückgegriffen. Ein „Einfangen“ des ATV durch einen Roboterarm (Canadarm2) wie beim japanischen HTV ist nicht möglich, da der russische Teil der Station nicht über passende Konnektoren, den sogenannte Power and Data Grapple Fixtures (PDGF) verfügt, wie das bei dem US-amerikanischen Teil der ISS der Fall ist. Das ATV befindet sich damit außerhalb der Reichweite des Canadarm2, was auch ein Grund für das automatische Ankopplungsmanöver ist.
Überwacht werden die ATV-Manöver vom ATV Control Centre (ATV-CC), das 2002 im französischen Centre national d’études spatiales in Toulouse eingerichtet wurde. Hier wird auch die Zusammenarbeit mit den für die ISS zuständigen Kontrollzentren in Moskau und Houston koordiniert.
Angedockt an die ISS bildet das ATV eine Erweiterung der Station. Der 45 m³ große Innenraum kann durch die Raumfahrer betreten werden. Das ATV kann 7,5 Tonnen Nutzlast zur ISS transportieren. Die Versorgungsgüter werden entnommen und das Vehikel mit bis zu 6,3 Tonnen Abfall beladen, der in der Raumstation angefallen ist. Auch wird das ATV während der Ankopplung durch die ISS-Besatzung zum Schlafen zweckentfremdet, denn es besitzt keine immer leuchtende Innenbeleuchtung und ist nicht an die Klimaanlage angeschlossen, wodurch der Geräuschpegel sehr viel geringer ist.[1]
Während der Kopplungsdauer werden die Triebwerke des ATV dazu genutzt, die Station in eine höhere Umlaufbahn (maximal 500 km) zu heben. Solche Korrekturen sind in regelmäßigen Abständen nötig, da die ISS aufgrund der Reibung mit der Restatmosphäre in der Erdumlaufbahn von rund 350 Kilometern täglich zwischen 50 und 150 Meter an Höhe verliert. Kontrollierte Schübe aus den Antrieben des ATV gleichen diesen Verlust aus. Jedes ATV führt genügend Treibstoff mit, um die Station bis zu 30 Kilometer anzuheben.
Das ATV kann bis zu sechs Monate mit der ISS verbunden werden. Nach der Nutzungszeit wird das ATV gezielt zum Absturz gebracht. Hierzu wird durch Abbremsen mit dem Triebwerk das Perigäum der Umlaufbahn so weit abgesenkt, dass das ATV beim nächsten Perigäumsdurchgang tief in die Erdatmosphäre eintaucht und weitgehend in den oberen Schichten der Atmosphäre verglüht.
Das ATV soll das russische, ebenfalls unbemannte Versorgungsraumschiff Progress nach der Stilllegung der amerikanischen Space-Shuttle-Flotte deutlich entlasten. Es hat pro Flug etwa die dreifache Transportkapazität gegenüber dem russischen Raumschiff.
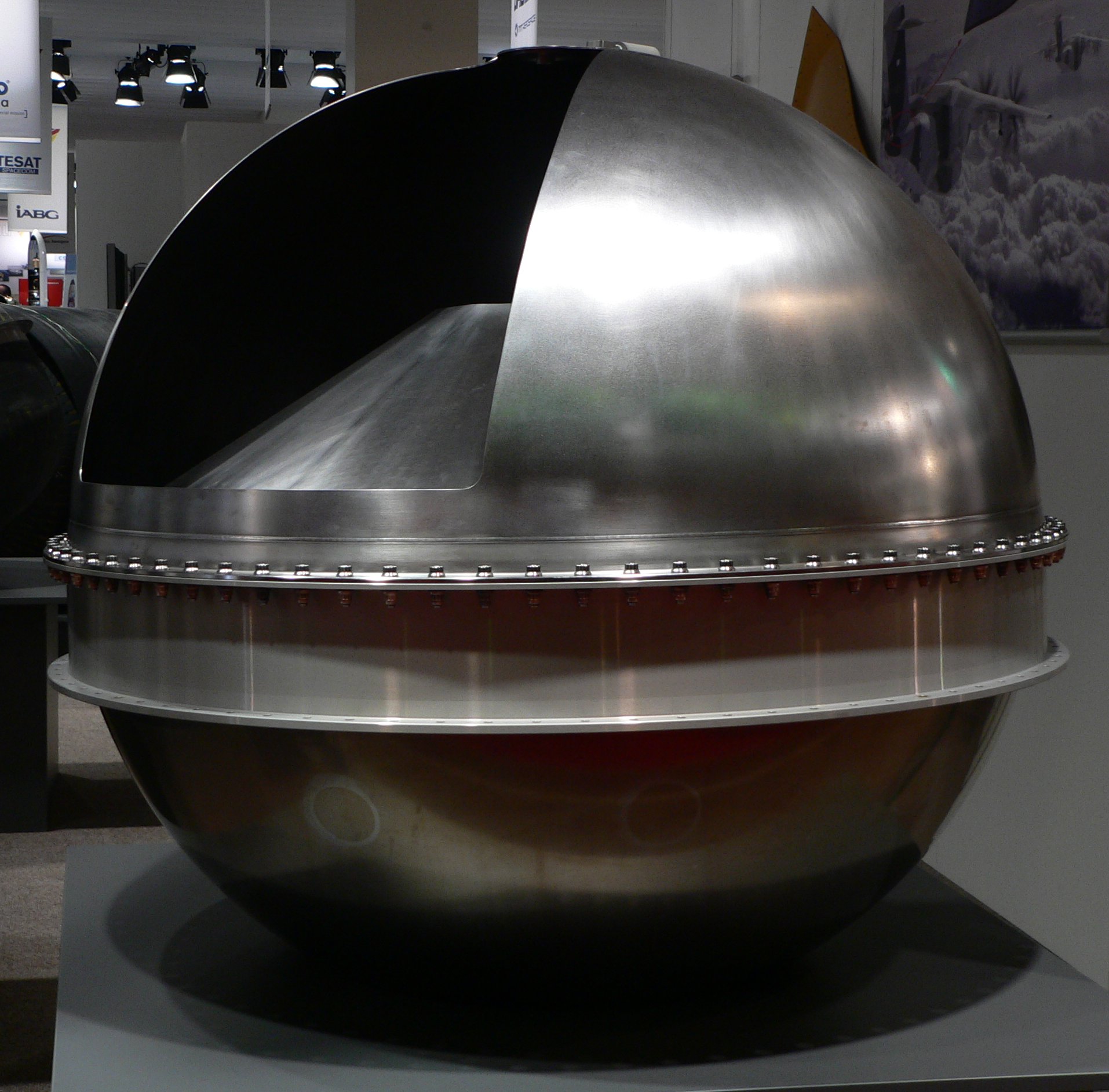
 Treibstofftank des ATV
Treibstofftank des ATVZur Navigation besitzt das ATV verschiedene Systeme. Über Star Tracker kann beispielsweise die eigene Lage im Raum bestimmt werden. In größerer Entfernung zur ISS kann das ATV mithilfe von GPS navigieren. Im Anflug werden GPS im relativen Modus zur ISS, optische Systeme und Laserinterferometer verwendet. Daneben stehen Beschleunigungssensoren und Gyroskope zur Verfügung.[2]
Das Lagekontrollsystem steuert 28 Triebwerksdüsen, die jeweils 220 Newton Schub liefern. Als Treibstoff kommt Monomethylhydrazin, als Oxidator MON3 zum Einsatz.
Kosten
Obwohl das ATV ein „Wegwerfprodukt“ ist, ist die Verwendung eines unbemannten Versorgungsschiffes für die ISS nicht unbedingt teurer als die Versorgung mit dem (wiederverwendbaren) Space-Shuttle-Orbiter, denn innerhalb einer bemannten Mission haben Sicherheitsaspekte eine große Bedeutung, was beträchtliche Kostensteigerungen mit sich bringt. Ein Flug des Space Shuttles, der bei der Planung 1972 mit 10,5 Millionen US-Dollar veranschlagt wurde, kostet heute 600–700 Millionen US-Dollar (bei rund 10 Tonnen Nutzlast im MPLM zur ISS), ein ATV-Flug mit 7,6 Tonnen Nutzlast dagegen etwa 330 Millionen Euro (etwa 449 Millionen US-Dollar per 10. November 2011). Ein Progress-Flug mit 2,3 Tonnen Nutzlast kostet etwa 40 Millionen US-Dollar. Ein HTV-Transporter mit rund 6 Tonnen Fracht soll ab dem zweiten Start 262 Millionen US-Dollar kosten.
Transporter Progress ATV HTV Space Shuttle mit MPLM Kapazität 2,3 t 7,6 t 6,0 t 10 t Fähigkeiten Frachttransport
VBK-Raduga
Treibstofftransfer
ReboostFrachttransport
Reboost
TreibstofftransferFrachttransport
Transport von ISPR
Transport von AußenlastenFrachttransport
Transport von ISPR
Rücktransport von ISPR
Stationsaufbau
ReboostTräger Sojus Ariane 5 H-2B Space Shuttle Preis pro Start
(1 € = 1,3616 US$)
(Transporter + Träger)29 Mio. EUR
40 Mio. USD
(20 Mio. + 20 Mio. USD)330 Mio. EUR
449 Mio. USD
(214 Mio. + 257 Mio. USD)192 Mio. EUR
262 Mio. USD
(115 Mio. + 147 Mio. USD)[3]330 Mio. EUR
450 Mio. USD[4]
(MPLM wiederverwendbar)Preis pro Tonne
(1 € = 1,3616 US$)12,8 Mio. EUR
17,4 Mio. USD43,4 Mio. EUR
59,1 Mio. USD32,1 Mio. EUR
43,7 Mio. USD33 Mio. EUR
45,0 Mio. USDMissionen
Nach dem Start von Johannes Kepler im Februar 2011 sollen drei weitere ATVs zur ISS fliegen:[5]
Nr. Bezeichnung Name Start (UTC) Ankopplung (UTC) Abkopplung (UTC) Deorbit Burn (UTC) Wiedereintritt (UTC) 1 ATV-1 Jules Verne 9. März 2008
04:033. April 2008
14:455. September 2008
21:3229. September 2008
12:5829. September 2008
13:312 ATV-2 Johannes Kepler 16. Februar 2011
21:5024. Februar 2011
15:5920. Juni 2011
14:4621. Juni 2011
20:0521. Juni 2011
20:493 ATV-3 Edoardo Amaldi 29. Februar 2012
(geplant) [6]4 ATV-4 Albert Einstein Februar 2013
(geplant)5 ATV-5 Februar 2014
(geplant)ATV-1: Jules Verne
 Juli 2008: Die ISS mit dem angedockten „Jules Verne“ (unten)
Juli 2008: Die ISS mit dem angedockten „Jules Verne“ (unten)Der Start des ersten ATVs erfolgte am 9. März 2008 um 4:03 UTC. Es trägt den Namen Jules Verne zur Erinnerung an den französischen Science-Fiction-Schriftsteller.[7] Nach einer eingehenden Überprüfung aller Systeme sowie mehrerer Rendezvous-Manöver dockte der unbemannte Weltraumfrachter am 3. April um 14:45 UTC erfolgreich an der Internationalen Raumstation an. Die Kopplung war das erste vollautomatische Dockingmanöver im All, das nicht von einem russischen Raumfahrzeug durchgeführt wurde.
Ende April 2008 wurde „Jules Verne“ erstmals genutzt, um die Umlaufbahn der ISS anzuheben. Mit einem 5-minütigen Testlauf der ATV-Triebwerke am 21. April wurde die mittlere Bahnhöhe um 1,7 km erhöht. Vier Tage später hob der Frachter die Station durch eine Zündung von zwei Triebwerken mit einer Brenndauer von 740 Sekunden um weitere 4,7 km an. Der Gesamtschub von 1000 Newton beschleunigte die Station mit ihrer Masse von 280 Tonnen um 2,65 m/s.[8][9]
Am 18. Juni fand der erste automatische Treibstofftransfer von rund 280 kg UDMH und 530 kg Stickstofftetroxid vom ATV in die Treibstofftanks der ISS statt.[10]
Bei dem dritten Reboost-Manöver des ATV wurde am 20. Juni die Bahn der ISS um 7 km angehoben. Mit dem 20 Minuten dauernden Schub von zwei Triebwerken wurden die 300 Tonnen Masse der ISS unter Aufwendung von 400 Kilogramm Treibstoff um 4,05 m/s beschleunigt. Nach dem Reboost am 23. Juli wurde die Station beim letzten Reboost durch Jules Verne am 13. August 2008 um 3,3 m/s beschleunigt und damit innerhalb von 16 min 35 sek um 5,8 km auf eine mittlere Bahnhöhe von 356 km angehoben. Am 27. August 2008 16:11 UTC fand seit 2003 erstmals wieder ein Ausweichmanöver der ISS statt, bei dem das ATV zum Abbremsen der Station eingesetzt wurde[11], bevor es am 5. September abdockte. Der Wiedereintritt von „Jules Verne“ fand am 29. September 2008 um 13:31:33 UTC in 120 Kilometer Höhe statt[12] und wurde in der „ATV Re-entry observation campaign“ von zwei Beobachterflugzeugen und von Bord der ISS beobachtet und dokumentiert (s.a.[13]).
ATV-2: Johannes Kepler
 März 2011: Die ISS mit dem angedockten ATV-2 „Johannes Kepler“ (unten)
März 2011: Die ISS mit dem angedockten ATV-2 „Johannes Kepler“ (unten)Am 19. Februar 2009 beschloss die europäische Raumfahrtbehörde, dass der zweite Transporter den Namen des deutschen Astronomen und Mathematikers Johannes Kepler tragen soll. Kepler hat auf Basis der Planetenbeobachtungen von Tycho Brahe die nach ihm benannten Keplerschen Gesetze abgeleitet.[14] Der Start war zunächst für den 15. Februar 2011 22:13 UTC geplant.[15][16] Aufgrund eines Problems mit der Sensorik in einem der Sauerstofftanks des Haupttriebwerkes wurde der automatische Startablauf vier Minuten vor dem Start abgebrochen und um ca. 24 Stunden auf 21:50:55 UTC des Folgetages verschoben. Dieser Start der mit über 20 Tonnen bis dahin schwersten Nutzlast der Ariane 5 erfolgte planmäßig.[17] Das Ankoppeln an der ISS fand am 24. Februar 15:59 UTC statt. Die Fracht mit einer Masse von insgesamt 7060 kg beinhaltet u. a. 4535 kg Treibstoff, um die ISS anzuheben und 860 kg zum Betanken des Sarja-Moduls. Mit an Bord ist das Experiment GeoFlow II, ein Modell zum Verständnis der Konvektionsvorgänge im Erdmantel.[18] Genauere Erkenntnisse über die Vorgänge beim Wiedereintritt des Raumtransporters sollen mit dem Reentry Breakup Recorder (REBR) gewonnen werden, einem Datenlogger, der während der letzten Flugphase Daten über die Desintegration des Transporters aufzeichnen und diese dann über das Iridium Satelliten Netzwerk zur Erde senden soll.[19] Die Daten sollen helfen, die Vorgänge beim Auseinanderbrechen genauer zu verstehen und so die Sicherheit beim Wiedereintritt von Raumfahrzeugen zu verbessern.
Am 12. Juni 2011 wurde die Bahn der ISS vom ATV-2 um 19,3 km auf eine mittlere Bahnhöhe von 365,1 km angehoben. Dazu arbeiteten je zwei der vier Triebwerke des Raumfrachters in zwei Abschnitten 36 bzw. 40 Minuten.[20] Die weitere Anhebung der Flugbahn der ISS auf rund 380 km erfolgte am 15. und 17. Juni.[21]
Nachdem der Frachter mit 1,3 Tonnen Abfall beladen worden war, trennte er sich am 20. Juni um 14:48 UTC von der Station zum Wiedereintritt.[22] Am 21. Juni verglühte das ATV schließlich über dem Südpazifik. Der mit einem eigenen Hitzeschutzschild ausgestattete „Reentry Breakup Recorder“, eine Art Black Box, soll Daten über den Wiedereintritt in die Atmosphäre und das Auseinanderbrechen des Raumtransporters sammeln. Da die Black Box nicht geborgen werden soll, werden die Daten ab Erreichen einer Höhe von 18 km per Satellit zur Bodenstation übertragen.[23][24]
Weitere ATVs
Am 16. März 2010 gab die ESA bekannt, dass das dritte ATV nach dem italienischen Physiker Edoardo Amaldi benannt wird.[25] Das ATV-4 soll den Namen Albert Einsteins tragen, was am 26. Mai 2011 bekannt gegeben wurde.[26]
Mögliche Weiterentwicklung des ATV
Die Konzeptstudie „ATV Evolution Scenarios“[27], der ESA sieht das ATV als Basis zur Entwicklung zukünftiger Raumschiffe. Beweggründe sind zum einen das Auslaufen des amerikanischen Space-Shuttle-Programms im Jahre 2010, da bis zur Einführung des geplanten Orion-Raumschiffes ab 2014 nur die russischen Sojus-Raumschiffe zum Transport von Astronauten zur ISS zur Verfügung stehen und zum anderen die Unterstützung der europäischen Raumfahrtindustrie, um die Unabhängigkeit zu gewährleisten.; UIC (Unpressurized Logistics Carrier): Der UIC soll mehrere Tonnen von nicht unter Luftdruck stehender Fracht zur ISS bringen. Hierzu wird das im derzeitigen ATV integrierte Frachtmodul durch das UIC ersetzt. Die Fracht kann dann durch den European Robotic Arm oder durch einen Astronauten an die endgültige Position an der Raumstation angebracht werden.
- LCRS (Large Cargo Return Spacecraft)
- Der Plan sieht vor, das Frachtmodul des ATV mit einem Hitzeschild für den Wiedereintritt in die Atmosphäre auszustatten. Damit soll es möglich sein, mehrere hundert Kilogramm an Fracht und Experimenten zurück zur Erde zu bringen. Hierfür könnte das Konzept des Atmospheric Reentry Demonstrators (ARD) genutzt werden, welches bereits im Jahre 1998 erfolgreich getestet wurde.
- CARV (Cargo Return Vehicle)
- Das CARV ist eine weitere, detailliertere Studie mit einem höheren Budget aus dem Jahre 2004. Es soll am amerikanischen Teil der ISS andocken können, um die International Standard Payload Racks (ISPR) auszutauschen und zurück zur Erde zu bringen.
- Small Payload Return
- Unter Ausnutzung des inneren Volumens des ATV könnte es mit einer kleinen Kapsel für den Rücktransport von circa 150 kg Material zur Erde ausgestattet werden.
- CTV (Crew Transport Vehicle)
- In der Modifikation als CTV soll das ATV den Transport von Astronauten ermöglichen. In der ersten Phase dient es dabei als Crew Return Vehicle (CRV) für die ISS. In einer weiteren Entwicklungsstufe soll es als vollwertiges Raumschiff eingesetzt werden können, um Astronauten in den Weltraum und zurück zur Erde zu bringen. Im Juni 2006 wurde dazu von der ESA die Studie für ein Crew Space Transportation System (CSTS) in Auftrag gegeben. Darin wird die Konstruktion eines Raumschiffs in Kooperation mit Russland erörtert, mit dem der Mond-Orbit erreicht werden kann. Hierzu sollen auch erprobte Technologien des ATV zum Einsatz kommen.
- Free-Flying Lab/The Safe-Haven
- Das ATV könnte vergleichsweise einfach zu einem unbemannten freifliegenden Labor weiterentwickelt werden. Dieses könnte einen besseren Mikrogravitationslevel für Experimente bereitstellen. Zum Austausch von Experimenten soll es an die ISS andocken. Weiterhin könnte ein solches Modul als eine Art Rettungsboot (Safe-Haven) fungieren. Dies würde im Falle eines schweren Störfalles auf der ISS genug Zeit geben, die Besatzung mit Hilfe eines Sojus-Raumschiffs oder eines Space Shuttles zu retten.
- MSS (Mini Space station)
- Das ATV könnte mit zwei Andockmechanismen ausgestattet werden und so dem Aufbau einer Mini-Raumstation oder eines Raumlabors dienen.
- ETV (Exploration Transport Vehicle)
- Weiterentwicklungen des ATV könnten für den Transport von Fracht und Astronauten in den Mond- und den Mars-Orbit oder auch für den Einsatz von Weltraumteleskopen genutzt werden. Die ESA strebt damit langfristig die Weiterentwicklung des ATV zu einem universell nutzbaren Raumtransporter an.
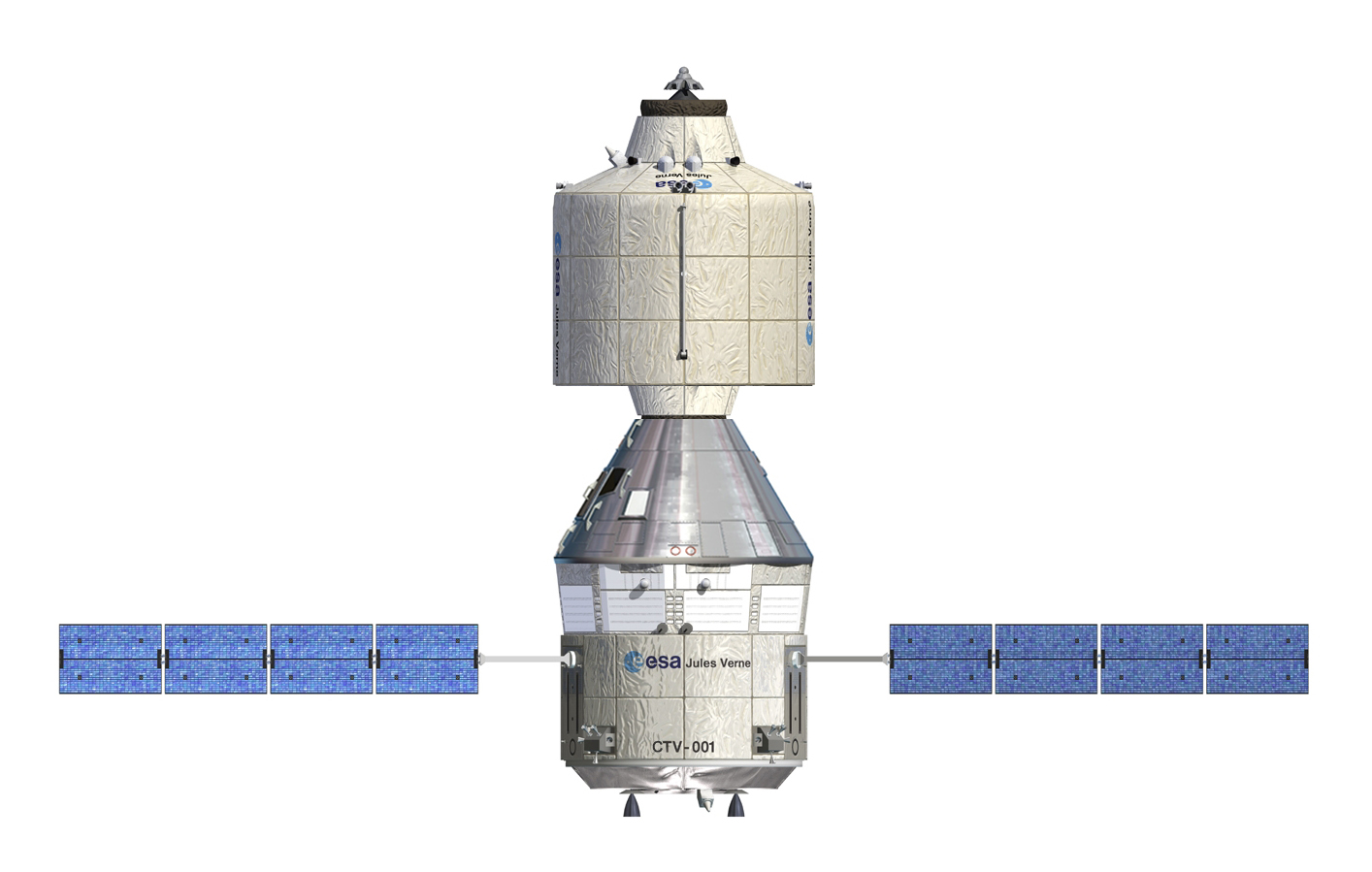
Geplante Weiterentwicklung des ATV zu einem bemannten Raumschiff
 Mögliches CSTS-Design mit Servicemodul, Landekapsel und Orbitalmodul
Mögliches CSTS-Design mit Servicemodul, Landekapsel und OrbitalmodulEADS Astrium und das DLR verkündeten am 14. Mai 2008 offizielle Pläne, das ATV zu einem bemannten Raumschiff weiterzuentwickeln. Das Raumschiff soll in der Lage sein, drei Astronauten in einen Low Earth Orbit zu bringen und von einer modifizierten Version einer Ariane-5-Rakete gestartet werden. Eine Mock-up des geplanten Raumschiffs wurde auf der Internationalen Luft- und Raumfahrtausstellung 2008 in Berlin präsentiert. Die Umsetzung des Projekts soll in zwei Phasen erfolgen. Die erste Phase sieht die Realisierung eines unbemannten Cargo Return Vehicle (CARV) bis 2015 vor, dies zum einen in Hinblick auf die Rückführung von wissenschaftlichen Experimenten von der ISS und zum anderen für die geplante Mars Sample Return Mission mit der NASA. Das vorgesehene Budget für das Projekt beträgt 1 Milliarde Euro. Die zweite Phase sieht die Entwicklung eines Raumschiffs bis 2020 vor, mit dem Astronauten sicher in den Orbit und zurück zur Erde transportiert werden können. Hierzu sind einige technische Entwicklungen notwendig, zum einen die Landekapsel mit Lebenserhaltungssystem und Hitzeschild, zum anderen ein Rettungssystem für eventuell auftretende Startprobleme. Die veranschlagten Kosten betragen mehrere Milliarden Euro.[28]
Der Europäische Weltraumrat hat bei seinem Treffen im November 2008 die geplanten ESA-Programme gebilligt. Das Programm zur Bemannten Raumfahrt erhält 2009 einen Anteil von 11 % (387 Millionen €) des gesamten ESA-Budgets.[29] Bis 2012 soll der Budget-Anteil 21% betragen. Dies beinhaltet Konzeptstudien für das Advanced Re-entry Vehicle (ARV), den geplanten unbemannten European Lunar Lander. Das „ISS exploitation activities“-Programm sieht die Produktion weiterer ATV zur Versorgung der ISS vor. Kooperationen mit der russischen Weltraumagentur Roskosmos und der japanischen JAXA bleiben ebenfalls bestehen.
Am 7. Juli 2009 erhielt EADS Astrium von der ESA den Auftrag für eine Projektstudie mit einem Gesamtvolumen von 21 Millionen Euro für das ARV. Transport von Fracht zur ISS und zurück zur Erde wird im Rahmen des ARV-Programms der ESA untersucht. So sei der erste Flug für 2016 und der erste Flug der bemannten Version für frühestens 2022 geplant.
Technische Daten
 Wassertank
Wassertank- Max. Länge: 10,27 m
- Max. Durchmesser: 4,48 m (mit ausgefahrenen Solarzellenflächen 22,28 m)
- Leermasse: 10.470 kg
- Startmasse: 19.400 kg[30]
- Verbrauchsmaterial des ATV: 2.613 kg
- Nutzlastkapazität: (max 7.667 kg, typisch 7.500 kg) kann sich variabel zusammensetzen aus
- maximal 5.500 kg trockenes Material wie Nahrungsmittel
- maximal 4.700 kg Treibstoff
- maximal 860 kg Treibstoff für die ISS (UDMH und Stickstofftetroxid)
- maximal 840 kg Trinkwasser
- maximal 100 kg Luft (Sauerstoff und Stickstoff)
- Maximal mögliche Masse beim Start: 20.750 kg
- Abfall-Aufnahmekapazität: typisch 6.300 kg
- Energieversorgung: vier Solarzellen-Panele und acht wiederaufladbare Batterien, Energieverbrauch 400 bis 900 W
Einzelnachweise
- ↑ ATV - Aktueller Status, 17. Juni 2008, Abgerufen am 27. August 2011
- ↑ Bernd Leitenberger: Das ATV Jules Verne. 1. Auflage. Books on Demand GmbH, 2008, ISBN 9783837055726, S. 48f.
- ↑ Kazuki Shiibashi: Japan Unveils Unmanned Cargo Carrier. AVIATION WEEK, 22. April 2008, abgerufen am 20. Dezember 2009 (englisch).
- ↑ Frequently Asked Questions. NASA, abgerufen am 13. Mai 2010 (englisch).
- ↑ Stephen Clark: Europe's second cargo freighter to fly in December. Spaceflight Now, 17. September 2010, abgerufen am 4. Februar 2011 (englisch).
- ↑ DLR Blog Raumzeit 17. Interview über das ATV. Geplanter Start bei 87:45 genannt.
- ↑ ESA Nachrichten: Europa startet seinen ersten ATV-Versorgungstransporter „Jules Verne“ zur ISS, 9. März 2008
- ↑ EADS Astrium: ATV hebt Internationale Raumstation ISS an, 25. April 2008
- ↑ ESA: Jules Verne boosts ISS orbit, 25. April 2008
- ↑ ESA: Premiere for Europe: Jules Verne refuels the ISS, 21. Juni 2008
- ↑ ESA: ATV carries out first debris avoidance manoeuvre for the ISS, 28. August 2008
- ↑ ESA: Successful re-entry marks bright future for ATV
- ↑ ESA: "Jules Verne" ATV Re-entry, Sep 2008
- ↑ Second ATV named after Johannes Kepler (englisch) – Artikel bei der ESA, vom 19. Februar 2009
- ↑ International partners update launch manifest. Arianespace, 1. Oktober 2010, abgerufen am 1. Oktober 2010 (englisch).
- ↑ Operations timeline 15/16 February 2011 (englisch) – Artikel beim ATV-Blog, vom 14. Februar 2011
- ↑ Raumfahrer.net: ATV 2: Kepler ist unterwegs zur ISS
- ↑ GeoFlow II: ISS Experimente: Konvektionsströme des Erdmantels in der Schwerlosigkeit
- ↑ ESA: ATV Johannes Kepler – Information Kit
- ↑ Ian Benecken, Simon Plasger, Klaus Donath: Größte Bahnanhebung der ISS durch ATV-2. Raumfahrer.net, 13. Juni 2011, abgerufen am 13. Juni 2011.
- ↑ Thomas Weyrauch: ATV 2: Vorbereitung auf den Wiedereintritt. Raumfahrer.net, 18. Juni 2011, abgerufen am 23. Juni 2011.
- ↑ Jonathan Amos: Europe's ATV space freighter to undock. bbc.uk, 20. Juni 2011, abgerufen am 20. Juni 2011.
- ↑ Spiegel: Kepler verglüht über dem Pazifik. Abgerufen am 22. Juni 2011.
- ↑ DLR: ATV-2: Wiedereintritt über dem Südpazifik. Abgerufen am 22. Juni 2011.
- ↑ Third ATV named after Edoardo Amaldi. ESA, 16. März 2010, abgerufen am 17. März 2010 (englisch).
- ↑ ATV-4 to carry name Albert Einstein. ESA, 26. Mai 2011, abgerufen am 26. Mai 2011 (englisch).
- ↑ ATV Evolution Scenarios. ESA, abgerufen am 13. Oktober 2011 (englisch).
- ↑ ATV evolution: Advanced Reentry Vehicle (ARV). ESA, 25. März 2010, abgerufen am 31. Oktober 2011 (englisch).
- ↑ ESA-Budget 2009
- ↑ www.arianespace.com: The Spaceport welcomes a record-setting payload with the arrival of Europe’s Automated Transfer Vehicle. 31. Juli 2007. (englisch)
- DLR: ATV:Automated Transfer Vehicle, Mission Jules Verne (englisch/deutsch, PDF)
- Space radio measuring docking systems (englisch/russisch)
Weblinks
 Commons: Automated Transfer Vehicle – Sammlung von Bildern, Videos und Audiodateien
Commons: Automated Transfer Vehicle – Sammlung von Bildern, Videos und Audiodateien- EADS Astrium – ATV
- Übersicht zum ATV auf der DLR-Website
- Übersicht zum ATV auf der ESA-Website (englisch)
- ESA: Jules Verne ATV Information Kit (englisch)
- ATV Jules Verne Launch Kit von EADS Astrium (englisch; PDF-Datei; 5,74 MB)
- Video vom Wiedereintritt und Verglühen des ATV „Jules Verne“
- ESA: Johannes Kepler ATV Fact Sheet, incl. 3D-Modell (englisch)
- Raumzeit-Podcast über das ATV mit dem Projektleiter Nico Dettmann

Historisch: TKS-Raumschiff
Aktuell: Progress | Automated Transfer Vehicle | H-2 Transfer Vehicle
Geplant: Cygnus | Dragon (auch bemannt)
Abgesagt: Kistler K-1
Wikimedia Foundation.
Schlagen Sie auch in anderen Wörterbüchern nach:
Automated Transfer Vehicle — The Automated Transfer Vehicle or ATV is an expendable, unmanned resupply spacecraft developed by the European Space Agency (ESA). [cite web |title=Automated Transfer Vehicle, ESA document EUC ESA FSH 003 Rev 1.2 (specification)… … Wikipedia
Automated Transfer Vehicle — Véhicule automatique de transfert européen Pour les articles homonymes, voir ATV. Le Véhicule automatique de transfert européen (en anglais, « Automated Transfer Vehicle (ATV) ») selon le terme utilisé par Jean Jacques Dordain, le… … Wikipédia en Français
Automated transfer vehicle — Véhicule automatique de transfert européen Pour les articles homonymes, voir ATV. Le Véhicule automatique de transfert européen (en anglais, « Automated Transfer Vehicle (ATV) ») selon le terme utilisé par Jean Jacques Dordain, le… … Wikipédia en Français
Automated guided vehicle — The automated guided vehicle or automatic guided vehicle (AGV) is a mobile robot used in industrial applications to move materials around a manufacturing facility or a warehouse. Introduction Automated guided vehicles (AGVs) help to reduce costs… … Wikipedia
H-2 Transfer Vehicle — Das HTV in der Freiflugphase vor dem Einfangen Der Roboterarm greift … Deutsch Wikipedia
H-II Transfer Vehicle — (HTV 2 Kounotori) en approche de l ISS Description Rôle: Vaisseau automatique construit par la JAXA pour l ISS. Son rôle est d approvisionner le module … Wikipédia en Français
H-ii transfer vehicle — Le H II Transfer Vehicle (ou HTV) est un vaisseau spatial inhabité élaboré par l Agence d exploration aérospatiale japonaise. Il est utilisé afin notamment de ravitailler la Station Spatiale Internationale et en particulier le laboratoire… … Wikipédia en Français
H-II Transfer Vehicle — The H II Transfer Vehicle, or HTV, is a robotic spacecraft intended to resupply the Kibō Japanese Experiment Module (JEM) on the International Space Station (ISS), and the rest of the station, if need be. The Japan Aerospace Exploration Agency,… … Wikipedia
Vehicle Equipment Bay — Modell einer Ariane 5 in Originalgröße in der Cité de l’espace in Toulouse Die Ariane 5 ist eine europäische Trägerrakete aus der Ariane Serie, die im Auftrag der ESA entwickelt wurde und seit 1996 im Einsatz ist. Sie ist die leistungsfähigste… … Deutsch Wikipedia
Orion Multi-Purpose Crew Vehicle — For initial design of this spacecraft, see Crew Exploration Vehicle. Orion Multi Purpose Crew Vehicle Description Role: Beyond LEO, back up for commercial cargo and crew to the ISS[1] Cre … Wikipedia
Automated Transfer Vehicle




18+
© Academic, 2000-2026
- Kontaktieren Sie uns: Unterstützung, Werbung
Wörterbücher Export, schritte mit PHP, Joomla, Drupal, WordPress, MODx.