- Ternärkörper
-
Ein Ternärkörper ist eine algebraische Struktur, die in der synthetischen Geometrie als Koordinatenbereich einer beliebigen affinen Ebene dient. Als Menge besteht der Ternärkörper dabei aus den Punkten einer fest gewählten Geraden der Ebene, nämlich der ersten Koordinatenachse des Koordinatensystems, das man auf dieser Ebene einführt. Auf dieser Punktmenge wird durch die Ternärkonstruktion eine dreistellige Verknüpfung T definiert, mit der die Gerade die algebraische Struktur eines Ternärkörpers erhält. Umgekehrt gibt es zu jeder Struktur (K,T), die die Axiome eines Ternärkörpers erfüllt, eine affine Ebene, deren Punkte die Paare
 sind und deren Geraden sich als Lösungsmengen von Gleichungen in K mit Hilfe der Ternärverknüpfung T darstellen lassen.
sind und deren Geraden sich als Lösungsmengen von Gleichungen in K mit Hilfe der Ternärverknüpfung T darstellen lassen.Etwas salopp formuliert: Jede affine Ebene „ist“ eine zweidimensionale Ebene über einem Ternärkörper und zu jeder affinen Ebene gibt es bis auf Isomorphie genau einen Ternärkörper als Koordinatenmenge. Die Mächtigkeit des Ternärkörpers entspricht der Ordnung der zugehörigen affinen Ebene.
Ist die affine Ebene eine affine Translationsebene, dann kann ihr Koordinatenternärkörper zu einem Quasikörper gemacht werden, für desarguesche Ebenen ist dies sogar ein Schiefkörper, für pappussche Ebenen ein Körper.
Ein Ternärkörper, in dem die Ternärverknüpfung durch eine Addition und eine Multiplikation dargestellt werden kann, wird als linear bezeichnet. Erfüllt in einem linearen Ternärkörper die Addition das Assoziativgesetz, dann wird er als kartesische Gruppe bezeichnet. Quasikörper sind stets kartesische Gruppen. Ein Quasikörper, in dem beide Distributivgesetze gelten, wird in der Geometrie als Halbkörper bezeichnet. Alternativkörper sind stets solche Halbkörper, Schiefkörper sind stets Alternativkörper.
Die hier beschriebenen Koordinatenbereiche, die in der synthetischen Geometrie als Koordinatenkörper bezeichnet werden, auch wenn sie nicht Körper im algebraischen Sinn sind, können auch zur Einführung von projektiven Koordinaten auf einer projektiven Ebene benutzt werden. Der Zusammenhang zwischen affinen und projektiven Schließungssätzen und den Folgerungen für die algebraische Struktur des Koordinatenbereichs der Ebenen, die den Schließungssatz erfüllen, wird im vorliegenden Artikel dargestellt und weiter unten im Abschnitt #Schließungssätze und Koordinatenbereiche zusammengefasst. Bei der Klassifikation projektiver Ebenen stellt sich heraus, dass jeder Klasse von projektiven Ebenen (im Sinne der Klassifizierung nach Hanfried Lenz) eine Klasse von Koordinatenbereichen mit jeweils für diese Ebenenklasse charakteristischen Zusatzeigenschaften zugeordnet werden kann.
Im vorliegenden Artikel werden Algebraisierungen von affinen Ebenen beschrieben, die auf einem Koordinatensystem beruhen, und die Verknüpfungen, die sich durch die geometrische Struktur auf einer Koordinatenachse ergeben. Ein anderer Zugang, der sich vor allem für nichtdesarguesche affine Translationsebenen als fruchtbar erweist, besteht darin, gewisse, nämlich die spurtreuen, Endomorphismen der Translationsgruppe algebraisch zu beschreiben. Dieser Ansatz führt bei desargueschen Ebenen zu einem Schiefkörper, der isomorph zu dem im vorliegenden Artikel beschriebenen Koordinatenschiefkörper ist. Dieser andere Zugang wird im Hauptartikel Affine Translationsebene beschrieben.
Inhaltsverzeichnis
Geometrische Konstruktion
Hier werden zu einer affinen Ebene A ihr Koordinatenternärkörper K und dessen Verknüpfung geometrisch konstruiert. Dazu müssen in der affinen Ebene drei nicht auf einer Geraden liegende Punkte (O;E1,E2) als Koordinatenbezugssystem (Punktbasis) fest gewählt werden. Der Punkt O ist der Ursprung, die anderen Punkte sind die Einheitspunkte dieses Koordinatensystems. Die Punkte der Verbindungsgeraden OE1, der ersten Koordinatenachse, bilden die Koordinatenmenge K. Diese Koordinatenmenge wird durch die Ternärkonstruktion mit einer dreistelligen Verknüpfung ausgestattet, mit der sie zu einem Ternärkörper wird.
Koordinatenkonstruktion
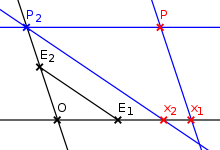 Konstruktion des Koordinatenpaars (x1,x2) zu einem Punkt P und umgekehrt.
Konstruktion des Koordinatenpaars (x1,x2) zu einem Punkt P und umgekehrt.
Zu einem Punkt
 ist
ist- x1: Die Parallele zu OE2 durch P schneidet die erste Koordinatenachse OE1 in x1.
- x2: Die Parallele zu OE1 durch P schneidet die zweite Koordinatenachse OE2 in P2. Die Parallele zu E1E2 durch P2 schneidet die erste Koordinatenachse in x2.
Das Punktepaar
 heißt Koordinatenpaar des Punktes P, es ist dann üblich, wenn das Koordinatensystem (O,E1,E2) klar ist, P(x1 | x2) für den Punkt zu schreiben. Diese Konstruktion lässt sich umkehren: Zu einem Koordinatenpaar ist
heißt Koordinatenpaar des Punktes P, es ist dann üblich, wenn das Koordinatensystem (O,E1,E2) klar ist, P(x1 | x2) für den Punkt zu schreiben. Diese Konstruktion lässt sich umkehren: Zu einem Koordinatenpaar ist- P2: Die Parallele zu E1E2 durch x2 schneidet die zweite Koordinatenachse OE2 in P2.
- P: Die Parallele zu OE1 durch P2 schneidet die Parallele zu OE2 durch x1 in P.
Dadurch wird jedem Koordinatenpaar umkehrbar eindeutig ein Punkt der affinen Ebene A zugeordnet.
Die Abbildung rechts zeigt die Schritte beider Konstruktionen, der Koordinatenkonstruktion und ihrer Umkehrung. Beide Konstruktionen können so für alle Koordinatenbereiche vom Ternärkörper bis zum Körper in beide Richtungen angewendet werden.
Ternärkonstruktion
 Ternärkonstruktion.
Ternärkonstruktion.Zu drei Koordinaten
 , also Punkten auf der Achse K = OE1, wird zunächst durch umgekehrte Koordinatenkonstruktion der Punkt P mit den Koordinaten (x1 | x2) in der affinen Ebene konstruiert. Dann schneidet die Parallele zu aE2 durch P die erste Koordinatenachse OE1 in t = T(a,x2,x1).
, also Punkten auf der Achse K = OE1, wird zunächst durch umgekehrte Koordinatenkonstruktion der Punkt P mit den Koordinaten (x1 | x2) in der affinen Ebene konstruiert. Dann schneidet die Parallele zu aE2 durch P die erste Koordinatenachse OE1 in t = T(a,x2,x1).Die Abbildung rechts zeigt die Ternärkonstruktion. Die abgebildete Gerade aE2 erhält dann die Koordinatengleichung ga,a:T(a,x2,x1) = a, ihre Parallelenschar sind die Geraden mit den Gleichungen ga,d:T(a,x2,x1) = d, wobei d der jeweilige „x1-Achsenabschnitt“ ist, d. h. ga,d schneidet die erste Koordinatenachse in (d | 0). Die allgemeine Definition der Geradengleichungen erfolgt weiter unten.
Die Menge K der Punkte auf der ersten Koordinatenachse erfüllt mit der Verknüpfung, die durch die Ternärkonstruktion gegeben ist, die axiomatischen Forderungen an einen Ternärkörper. Die Strukturkonstanten, deren Existenz in den Axiomen gefordert ist, sind die Punkte 0 = O bzw. 1 = E1, also Ursprung bzw. erster Einheitspunkt der Punktbasis.
Algebraische Definition
Hier wird ein Ternärkörper K durch seine algebraischen Eigenschaften definiert und auf der so definierten Struktur eine affine Ebene aufgebaut, in der die Elemente von K2 als Punkte dienen.
Axiome
Eine Menge K zusammen mit einer dreistelligen Verknüpfung (der Ternärverknüpfung)
 heißt Ternärkörper, wenn die folgenden Axiome gelten:
heißt Ternärkörper, wenn die folgenden Axiome gelten:- Es gibt zwei verschiedene Elemente 0 und 1 in K, so dass T(0,b,c) = T(a,0,c) = c und T(a,1,0) = a und T(1,b,0) = b für alle
 gilt.
gilt. - Zu
 gibt es genau ein
gibt es genau ein  für das T(a,x2,x1) = d gilt.
für das T(a,x2,x1) = d gilt. - Zu
 gibt es, falls
gibt es, falls  ist, genau ein Paar , für das
ist, genau ein Paar , für das  gilt.
gilt. - Zu zwei Paaren
 gibt es, falls
gibt es, falls  ist, genau ein
ist, genau ein  , für das T(a,x2,x1) = T(a,y2,y1) gilt.
, für das T(a,x2,x1) = T(a,y2,y1) gilt.
In der Literatur finden sich auch Axiome für Ternärkörper, bei denen die Rollen der ersten und zweiten Stelle in der Ternärverknüpfung vertauscht sind. Diese Ternärverknüpfung, die hier als „Rechtsternärverknüpfung“[1] Top bezeichnet werden soll, geht aus der hier beschriebenen „Linksternärverknüpfung“ T durch die Vertauschung der ersten zwei Stellen hervor: T(a,x2,x1) = Top(x2,a,x1). Das dritte und vierte Axiom muss entsprechend für Top umformuliert werden.
Addition und Multiplikation, speziellere Ternärkörper
Man kann allgemein in Ternärkörpern eine Addition und Multiplikation so definieren:
- a + b = T(a,1,b) und
 .
.
Es gilt:
- (K, + ) ist eine Quasigruppe mit dem neutralen Element 0, also eine Loop,
 ist ebenfalls eine Loop mit dem neutralen Element 1 und
ist ebenfalls eine Loop mit dem neutralen Element 1 und- es gilt
 für jedes Element .
für jedes Element .
Gilt darüber hinaus
- T(a,b,c) = T(T(a,b,0),1,c), also
 für alle ,
für alle ,
so nennt man den Ternärkörper K linear. Ist die hier definierte Addition assoziativ, dann bildet (K, + ) sogar eine Gruppe. In diesem Fall nennt man einen linearen Ternärkörper
 eine kartesische Gruppe[2]. Der Begriff geht auf Reinhold Baer zurück.[3] Man beachte, dass eine kartesische Gruppe ein spezieller linearer Ternärkörper, also eine algebraische Struktur mit zwei unterschiedlichen Verknüpfungen ist, im Gegensatz zum sonst üblichen Begriff einer Gruppe. Mit der Addition allein bildet jede kartesische Gruppe eine Gruppe im sonst üblichen Sinn der Algebra. Diese muss nicht kommutativ sein.
eine kartesische Gruppe[2]. Der Begriff geht auf Reinhold Baer zurück.[3] Man beachte, dass eine kartesische Gruppe ein spezieller linearer Ternärkörper, also eine algebraische Struktur mit zwei unterschiedlichen Verknüpfungen ist, im Gegensatz zum sonst üblichen Begriff einer Gruppe. Mit der Addition allein bildet jede kartesische Gruppe eine Gruppe im sonst üblichen Sinn der Algebra. Diese muss nicht kommutativ sein.Der Ternärkörper einer affinen Translationsebene ist ein Quasikörper, eine kartesische Gruppe mit kommutativer Addition und weiteren Zusatzeigenschaften. Siehe dazu die Hauptartikel Affine Translationsebene und Quasikörper.
Geometrie der Ebene
- Die Menge der Paare A = K2 bildet die Menge der Punkte,
- Geraden sind
-
- die Lösungsmengen der Gleichungen x2 = c, (
 ) und
) und - die Lösungsmengen der Gleichungen T(a,x2,x1) = d, (
 bzw.
bzw.  für lineare Ternärkörper, also insbesondere Quasi- und Schiefkörper)
für lineare Ternärkörper, also insbesondere Quasi- und Schiefkörper)
- die Lösungsmengen der Gleichungen x2 = c, (
- Die Elemente c,a,d heißen Koeffizienten der Geraden gc bzw. ga,d. Sie beschreiben die Geraden eineindeutig, das heißt zwei Geraden stimmen genau dann überein, wenn sie vom gleichen Typ sind und ihre Koeffizienten übereinstimmen.
- Zwei Geraden sind genau dann parallel, wenn sie beide vom erstgenannten Typ sind
 oder wenn sie beide vom zweitgenannten Typ sind und in ihrem ersten Koeffizienten übereinstimmen:
oder wenn sie beide vom zweitgenannten Typ sind und in ihrem ersten Koeffizienten übereinstimmen:  .
.
Varianten
- Durch die Gleichungen T(a,x1,d) = x2;x1 = c erhält man explizite Geradengleichungen, die in der neueren Literatur bevorzugt werden. Dann ist d der „x2-Achsenabschnitt“, die Koeffizienten unterscheiden sich von den oben definierten.
- Entsprechende Geradengleichungen für die umgekehrte „Rechts“-Version Top erhält man natürlich wieder einfach durch Vertauschen der Rolle der ersten und zweiten Stelle.
Schließungssätze und Koordinatenbereiche
In der nachfolgenden Tabelle werden die Folgerungen zusammengefasst, die sich aus geometrischen Schließungssätzen für die algebraische Struktur eines Koordinatenbereiches ergeben, der einer Ebene zugeordnet werden kann. Außerdem zeigt die Tabelle, welche Schließungssätze eine Ebene erfüllt, deren Koordinatenbereich die Axiome für einen bestimmten „verallgemeinerten Körper“ erfüllt.
Affine Ebene Projektive Ebene Bezeichnung Geometrische Charakterisierung Koordinatenbereich Bezeichnung Projektiver Schließungssatz Affine Inzidenzebene (Axiome der affinen Ebene) (K,T) ist ein Ternärkörper. projektive Inzidenzebene (Axiome der projektiven Ebene) Translationsebene Kleiner affiner Satz von Desargues gilt. ist ein Quasikörper.Moufangebene Kleiner Satz von Desargues Desarguesche Ebene Großer affiner Satz von Desargues gilt. ist ein Schiefkörper.Desarguessche Ebene Großer Satz von Desargues Pappussche Ebene Großer affiner Satz von Pappos gilt. ist ein Körper.Pappussche Ebene Großer Satz von Pappos In der Tabelle impliziert jede Zeile die darüberliegende, wobei die Axiome der affinen bzw. projektiven Ebene von jeder spezielleren Ebene gefordert werden und die Verknüpfung im Ternärkörper eine andere ist als in den spezielleren Körpern. Affine Ebenen, deren Koordinatenbereich ein Schiefkörper ist, in denen also der große affine Satz von Desargues gilt, werden affine desarguessche Ebenen, alle anderen affine nichtdesarguessche Ebenen genannt. Die letzten beiden Spalten führen die entsprechenden projektiven Ebenen auf. Durch Schlitzen einer projektiven Ebene, die den in der Zeile genannten (projektiven) Schließungssatz erfüllt, entsteht stets eine affine Ebene von dem Typ, der in der gleichen Zeile beschrieben ist. Daher können die Koordinatenbereiche der affinen Ebenen auch auf die entsprechenden projektiven Ebenen angewandt werden. → Siehe dazu Projektives Koordinatensystem.
Allerdings entsteht aus einer Translationsebene durch projektive Erweiterung nicht immer eine Moufangebene. Aus einer Translationsebene, die durch Schlitzen aus einer Moufangebene hervorgegangen ist, entsteht dann durch projektive Erweiterung wieder die ursprüngliche Moufangebene. Dieser spezielle Fall tritt genau dann auf, wenn jeder Koordinatenbereich der affinen und der projektiven Ebene sogar ein – und zwar bis auf Isomorphie stets der gleiche – Alternativkörper ist. In allen anderen Zeilen entsteht ganz allgemein aus einer beliebigen affinen Ebene des in der Zeile genannten Typs durch projektive Erweiterung eine projektive Ebene des in der gleichen Zeile genannten Typs.
Beispiele und Bemerkungen
- Durch die im ersten Axiom des Ternärkörpers geforderten Strukturkonstanten hat jeder Ternärkörper mindestens zwei Elemente. Der kleinste Ternärkörper ist der Restklassenkörper
 . Die zugehörige affine Ebene der Ordnung 2, also das Minimalmodell einer affinen Ebene, ist die affine Fano-Ebene (der affine Ausschnitt wird in Affine Ebene erläutert).
. Die zugehörige affine Ebene der Ordnung 2, also das Minimalmodell einer affinen Ebene, ist die affine Fano-Ebene (der affine Ausschnitt wird in Affine Ebene erläutert). - Jeder Schiefkörper
 erfüllt die Axiome eines Quasikörpers und die eines Ternärkörpers, wenn man die Ternärverknüpfung wie oben für lineare Ternärkörper beschrieben definiert.
erfüllt die Axiome eines Quasikörpers und die eines Ternärkörpers, wenn man die Ternärverknüpfung wie oben für lineare Ternärkörper beschrieben definiert. - Der einer affinen Ebene bis auf Isomorphie eindeutig zugeordnete Ternärkörper ist genau dann ein Schiefkörper, wenn in der affinen Ebene der (große) affine Satz von Desargues gilt, in diesem Fall spricht man von einer desarguesschen Ebene und kann die Addition und Multiplikation wie oben für lineare Ternärkörper beschrieben durch die Ternärverknüpfung ausdrücken.
- Die Moulton-Ebene ist ein Beispiel für eine nichtdesarguessche affine Ebene. Sie kann als Ebene über dem Ternärkörper
 beschrieben werden, wobei die Ternärverknüpfung durch
beschrieben werden, wobei die Ternärverknüpfung durch

- definiert wird. Dieser Ternärkörper ist linear, erfüllt aber weder das Links- noch das Rechtsdistributivgesetz. Er ist also kein Quasikörper und die Moultonebene ist damit auch keine Translationsebene.
- Jede Divisionsalgebra über einem Körper ist ein Quasikörper und nur dann ein Schiefkörper, wenn die Multiplikation assoziativ ist.
- Ein Beispiel für einen solchen „echten“ Quasikörper sind die Oktonionen, eine 8-dimensionale nichtassoziative Divisionsalgebra über
 .[4]
.[4] - Jeder endliche Schiefkörper ist nach dem Satz von Wedderburn ein endlicher Körper. Daher sind alle desarguesschen Ebenen endlicher Ordnung pappussch, das heißt, jede endliche desarguessche affine Ebene hat die Ordnung
 mit einer Primzahl p und ist ein zweidimensionaler affiner Raum (im Sinne der linearen Algebra) über dem endlichen Körper
mit einer Primzahl p und ist ein zweidimensionaler affiner Raum (im Sinne der linearen Algebra) über dem endlichen Körper 
Beispiele der Ordnung 9
Alle endlichen projektiven und affinen Ebenen, deren Ordnung kleiner ist als 9, sind desarguessch – es existiert also bis auf Isomorphie je genau eine mit der Ordnung
 und keine mit der Ordnung 6.[5] Die Beispiele der Ordnung 9, die hier dargestellt werden, und alle verwendeten Aussagen und Begriffe finden sich in Weibel (2007). Es existieren genau 4 verschiedene (nicht isomorphe) projektive Ebenen der Ordnung 9. Eine davon ist die projektive Ebene über dem endlichen Körper
und keine mit der Ordnung 6.[5] Die Beispiele der Ordnung 9, die hier dargestellt werden, und alle verwendeten Aussagen und Begriffe finden sich in Weibel (2007). Es existieren genau 4 verschiedene (nicht isomorphe) projektive Ebenen der Ordnung 9. Eine davon ist die projektive Ebene über dem endlichen Körper  , die drei anderen sind nichtdesarguessch. Nichtdesarguessche projektive Ebenen endlicher Ordnung sind nie Moufangebenen, daher hängt hier die algebraische Struktur des Ternärkörpers von dem vollständigen Viereck ab, das man als projektive Punktbasis auf der Ebene einführt.
, die drei anderen sind nichtdesarguessch. Nichtdesarguessche projektive Ebenen endlicher Ordnung sind nie Moufangebenen, daher hängt hier die algebraische Struktur des Ternärkörpers von dem vollständigen Viereck ab, das man als projektive Punktbasis auf der Ebene einführt.Eine projektive Ebene heißt Translationsebene bezüglich einer ihrer Geraden, wenn sie in Bezug auf diese Gerade als Achse den kleinen projektiven Satz von Desargues erfüllt. Nur solche projektive Ebenen können einen Quasikörper als Koordinatenbereich haben. Eine gleichwertige Beschreibung einer solchen projektiven Translationsebene: Sie gehört zu einer der Klassen IVa, V oder VII in der Klassifikation projektiver Ebenen nach Hanfried Lenz.
Zwei der projektiven Ebenen der Ordnung 9 sind keine Translationsebenen in diesem Sinn, durch Schlitzen dieser Ebenen gelangt man stets zu einem Beispiel für eine nichtdesarguessche affine Ebene, die keine Translationsebene ist. Die dabei entstehenden Koordinatenternärkörper sind also durchweg keine Quasikörper.
Die dritte nichtdesarguessche Ebene, die bereits 1907 von Veblen und Wedderburn vorgestellt wurde,[6] ist eine projektive Translationsebene.[7] Sie kann so geschlitzt werden, dass eine nichtdesarguessche affine Translationsebene entsteht, die eine Koordinatenebene über dem Linksquasikörper
 der Ordnung 9 ist.
der Ordnung 9 ist.Der Linksquasikörper sieht so aus:
 , das heißt die multiplikative Struktur des Quasikörpers ist durch die Quaternionengruppe
, das heißt die multiplikative Struktur des Quasikörpers ist durch die Quaternionengruppe  gegeben und also eine Gruppe, Produkte, die 0 enthalten, sollen 0 sein. Die Addition ergibt sich, indem man für
gegeben und also eine Gruppe, Produkte, die 0 enthalten, sollen 0 sein. Die Addition ergibt sich, indem man für  so mit dem Vektorraum
so mit dem Vektorraum  identifiziert:
identifiziert:- (1,i) sei eine Basis,
- j = 1 − i und k = 1 + i.
Die übrigen Additionen ergeben sich aus der Vektorraumstruktur, wenn das formale Minusvorzeichen der Quaternionengruppe als additive Inversenbildung behandelt wird. Vertauscht man in 2. die Identifizierungen, definiert also j = 1 + i und k = 1 − i, dann entsteht der Rechtsquasikörper J9.
Insgesamt gibt es 5 nicht isomorphe Linksquasikörper mit 9 Elementen, einer davon ist
, die vier anderen (einschließlich natürlich ) treten als Koordinatenbereich der projektiven Translationsebene über auf, wenn man die projektive Punktbasis geeignet wählt. Daneben entsteht bei anderer Wahl des Koordinatensystems als Koordinatenbereich ein Ternärkörper, der kein Quasikörper ist. Einige der so entstehenden Ternärkörper sind isomorph zueinander.Zusatzeigenschaften der Koordinatenbereiche
Beim axiomatischen Aufbau der ebenen Geometrie spielt die Struktur des Koordinatenbereiches eine wichtige Rolle, da sich viele geometrische Eigenschaften in algebraischen Eigenschaften des Koordinatenbereiches widerspiegeln:
- Das Fano-Axiom erlaubt es, in affinen Translationsebenen Mittelpunkte und Punktspiegelungen zu definieren. Seine Gültigkeit ist für diese Ebenen äquivalent dazu, dass kein Element des Koordinatenquasikörpers die additive Ordnung 2 hat. Für (projektive und affine) desarguessche Ebenen ist seine Gültigkeit dazu äquivalent, dass der Koordinatenschiefkörper eine von 2 verschiedene Charakteristik hat.
Beim axiomatischen Aufbau der euklidischen Geometrie in einer pappusschen Ebene ist der „Koordinatenkörper“ tatsächlich ein Körper im Sinne der Algebra.
- Hat dieser Körper wenigstens zwei Quadratklassen, dann kann auf seiner Koordinatenebene eine Orthogonalitätsrelation definiert werden, ist seine Charakteristik nicht 2, dann können senkrechte Achsenspiegelungen und damit Winkelhalbierende definiert werden. Die pappussche Ebene wird damit zu einer präeuklidischen Ebene.
- Eine präeuklidische Ebene, in der Winkelhalbierende immer existieren, heißt frei bewegliche Ebene, ihr Koordinatenkörper ist ein pythagoreischer Körper, in dem −1 keine Quadratzahl ist. Diese Körper haben immer die Charakteristik 0. Umgekehrt kann die affine Ebene über einem solchen Körper stets mit einer Orthogonalität ausgestattet werden, die sie zu einer frei beweglichen Ebene macht. → Siehe dazu Winkelhalbierende#Synthetische Geometrie.
- Andererseits erlauben die Koordinatenkörper einer frei beweglichen Ebene stets eine Anordnung. Eine solche Anordnung des Körpers bedingt dann Anordnungsbeziehungen in der Ebene.
- Ist der Koordinatenkörper euklidisch, dann liefert die zugehörige affine Ebene ein Modell für eine ebene euklidische Geometrie, das sich mit klassischen geometrischen Methoden nicht von der herkömmlichen euklidischen Ebene über den reellen Zahlen unterscheiden lässt.
Literatur
- Walter Benz: Ein Jahrhundert Mathematik, 1890-1990. Festschrift zum Jubiläum der DMV. Vieweg, Braunschweig 1990, ISBN 3-528-06326-2.
- Marshall Hall: Projective planes. In: Transactions of the American Mathematical Society. 54, American Mathematical Society, 1943, S. 229–277 (http://www.jstor.org/stable/1990331 HTML).
- Wendelin Degen und Lothar Profke: Grundlagen der affinen und euklidischen Geometrie. In: Mathematik für das Lehramt an Gymnasien. 1. Auflage. Teubner, Stuttgart 1976, ISBN 3-519-02751-8.
- Günter Pickert: Projektive Ebenen. 2. Auflage. Frankfurt am Main 1975.
- Günter Pickert: Ebene Inzidenzgeometrie. 2. Auflage. Frankfurt am Main 1968.
- Oswald Veblen and Joseph Wedderburn: Non-Desarguesian and non-Pascalian geometries. In: Transactions of the American Mathematical Society. 8, American Mathematical Society, 1907, S. 379–388.
- Charles Weibel: Survey of Non-Desarguesian Planes. In: Notices of the American Mathematical Society. 54, American Mathematical Society, November 2007, S. 1294–1303 (http://www.ams.org/notices/200710/tx071001294p.pdf PDF, 702 KB).
Einzelnachweise
- ↑ Dies ist kein üblicher Begriff, er wird hier benützt, weil der „Rechts“-Ternärkörper einer affinen Translationsebene ein Rechtsquasikörper ist, während der in diesem Artikel nach Degen (1976) definierte Ternärkörper in diesen Fällen ein Linksquasikörper ist.
- ↑ Benz (1990), S. 244 und Hauke Klein: Cartesian Group. In: Geometry. Universität Kiel, 29. November 2002, abgerufen am 13. Dezember 2010 (HTML, englisch).
- ↑ Benz (1990), S. 244
- ↑ Weibel (2007) S.1296
- ↑ Peter Dembowski: Finite geometries. Springer, Berlin u.a. 1968, Kapitel 1
- ↑ Veblen-Wedderburn (1907)
- ↑ Hauke Klein: Lenz Type IVa. In: Geometry. Universität Kiel, 29. November 2002, abgerufen am 13. Dezember 2010 (HTML, englisch).


Wikimedia Foundation.