- Knicken
-
Unter Knicken versteht man in der Technischen Mechanik den Verlust der Stabilität bis hin zum schlagartigen und gewaltsamen Versagen von geraden bzw. leicht gekrümmten Stäben oder Balken unter der Wirkung von Druckkräften, deren Wirkungslinie in der Stabachse liegt, und/oder von Biegemomenten. Knickgefährdet sind nicht nur technische Konstruktionen wie Säulen und Stützen, sondern auch biologische Strukturen wie beispielsweise Gräser oder Knochen beim Wirbeltier.
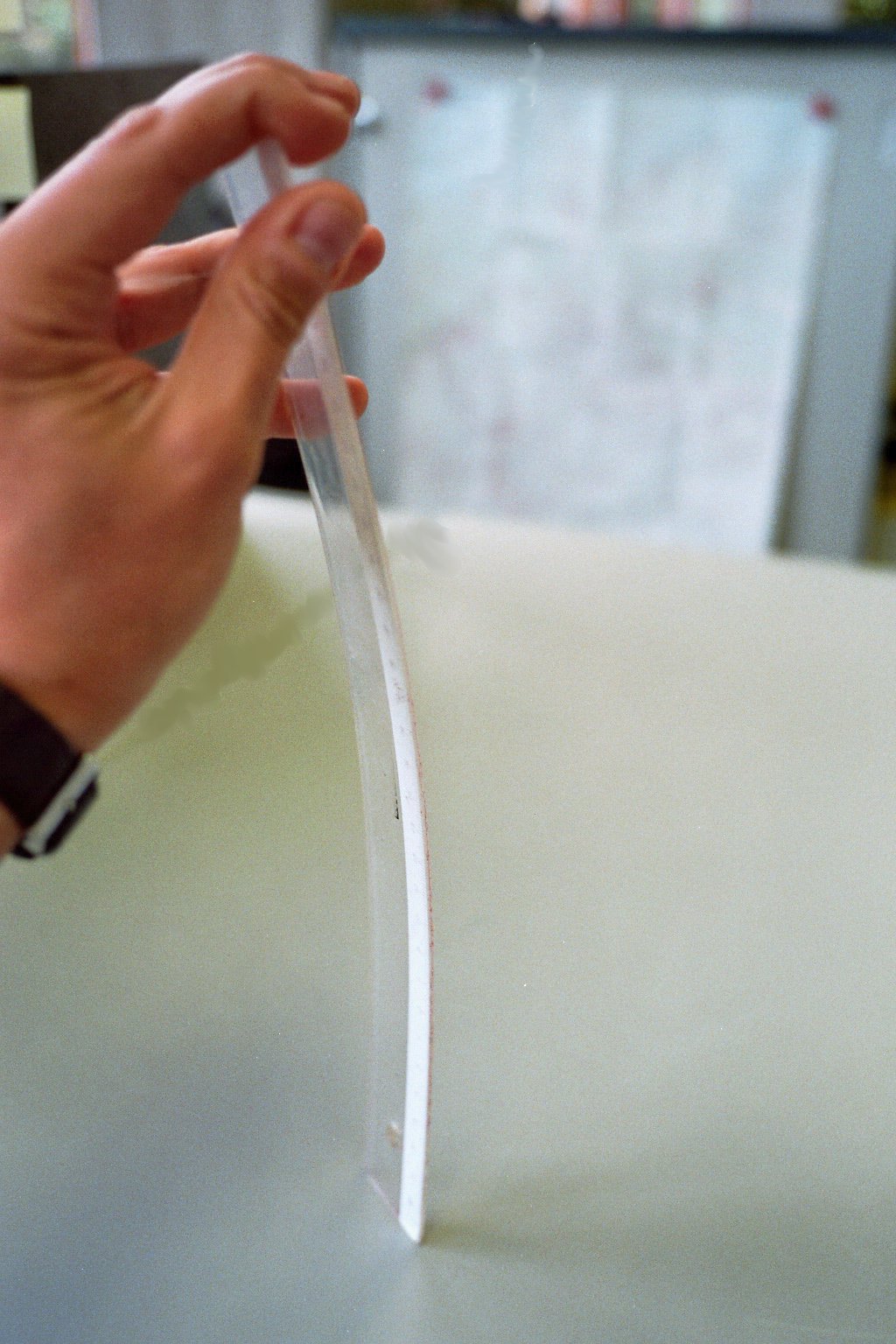
 Ein Lineal, das durch Aufbringen einer kritischen Last im Eulerfall 2 zum Knicken gebracht wird
Ein Lineal, das durch Aufbringen einer kritischen Last im Eulerfall 2 zum Knicken gebracht wird
Der Verlust der Stabilität äußert sich in mit der Belastung rasch wachsenden Formänderungen des Stabes oder des Balkens ab einer bestimmten Belastung (Knicklast), und zwar mit
- einem seitlichen Ausweichen der Stabachse oder Balkenachse (Biegeknicken) oder
- einem Verdrehen des Stab- bzw. Balkenquerschnitts (Drillknicken) oder
- einem seitlichen Ausweichen der Stabachse oder Balkenachse und einem Verdrehen des Stab- bzw. Balkenquerschnitts (Biegedrillknicken, früher auch als Kippen bezeichnet)
Die Knicklast ist abhängig von
- der Art der Beanspruchung (Verlauf der Druckkräfte und/oder Biegemomente über die Stablänge),
- Länge des Stabes oder des Balkens,
- Querschnittsform des Stabes oder des Balkens, konstante oder über die Stabachse veränderlicher Flächenträgheitsmomentes,
- Materialeigenschaften des Stabes (bei elastischem Material: Elastizitätsmodul und Fließgrenze),
- Einspannung bzw. Auflagerung oder Stützung des Stabes oder Balkens.
Eulersche Knickfälle (Biegeknicken)
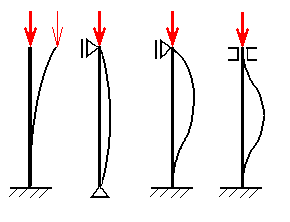
 Die vier Eulerfälle mit folgenden Randbedingungen (v.l.n.r.): (1) eingespannt/frei, (2) gelenkig/gelenkig, (3) eingespannt/gelenkig, (4) eingespannt/eingespannt
Die vier Eulerfälle mit folgenden Randbedingungen (v.l.n.r.): (1) eingespannt/frei, (2) gelenkig/gelenkig, (3) eingespannt/gelenkig, (4) eingespannt/eingespanntNach Leonhard Euler, der das Knicken schlanker Stäbe als erster behandelt hat, sind vier Fälle für das Knicken des elastischen Stabes mit mittig wirkender Druckkraft und speziellen Randbedingungen benannt. Euler untersuchte das Gleichgewicht der Spannungen an bereits durch die eigentliche Belastung verformten Stäben, dieser Lösungsansatz war für seine Zeit neu und führte zu umfangreichen Erkenntnissen innerhalb der Stabilitätstheorie. In die Rechnung zum Nachweis der Knicksicherheit gehen sämtliche geometrischen, mechanischen und werkstoffseitigen Parameter des belasteten Bauteiles ein.
Die Knickkraft kann für den elastischen Bereich durch eine einzige Formel dargestellt werden:
 : Elastizitätsmodul
: Elastizitätsmodul : axiales Flächenträgheitsmoment des Querschnittes
: axiales Flächenträgheitsmoment des Querschnittes : Kreiszahl Pi ≈ 3,1415926…
: Kreiszahl Pi ≈ 3,1415926… : Knicklänge, die mit der Stablänge
: Knicklänge, die mit der Stablänge  in folgender Beziehung steht:
in folgender Beziehung steht: 
Für die Eulerfälle (von links nach rechts im Bild) haben die Knicklängenbeiwerte β folgende Werte:
- (1) = 2
- (2) = 1
- (3) = 0,699… (nicht 0,707…!)
- (4) = 0,5
Für den Eulerfall (2) stimmen damit Knicklänge und Stablänge überein. Die Werte für β können deutlich größer als 2 werden, wenn im Eulerfall (1) die belastende Kraft während des Ausknickens ihre Richtung verändert.
Als weitere Größe wird der Schlankheitsgrad λ verwendet:
wobei i für den Trägheitsradius des Querschnittes steht.
Weiterhin ergibt sich die Knickspannung
 zu:
zu:Die Funktion σk(λ) ergibt eine Hyperbel zweiten Grades, die so genannte Euler-Hyperbel.
Nicht elastisches Ausknicken nach Tetmajer
 Ein Schornstein eines ehemaligen Industriebetriebes als knickgefährdete Struktur
Ein Schornstein eines ehemaligen Industriebetriebes als knickgefährdete StrukturBei gedrungenen Stäben schließt sich unterhalb eines Grenzschlankheitsgrades ein Bereich des Knickens an, der nicht mehr alleine durch die Elastizität des Materiales gekennzeichnet ist. Für einen Baustahl mit der Bezeichnung S235JR (S235JRG2 – alte Bezeichnung: St37) liegt die Grenze für λ bei 105. Für andere Werkstoffe werden ähnliche Grenzwerte angegeben.
Die Grenzschlankheit lässt sich auch berechnen. Sie ergibt sich zu:
Wenn σp die Proportionalgrenze des Werkstoffes des gedrückten Stabes ist.
Unterhalb dieses Grenzschlankeitsgrades sind Gleichungen nach „Tetmajer“ gültig. Dies sind Zahlenwertgleichungen, die den Schlankheitsgrad als unabhängige Variable in der Funktion haben. Sie haben folgenden Aufbau:
Die Koeffizienten für die Tetmajer-Gleichung können für die geläufigsten Bauwerkstoffe der folgenden Tabelle entnommen werden:
Werkstoff Koeffizient a Koeffizient b Koeffizient c Nadelholz 29,3 –0,194 0,000 Gusseisen (Grauguss) 776,0 –12,000 0,053 Baustahl S235JRG2 (St37) 310,0 –1,140 0,000 Baustahl S355J2G3 (St52) 335,0 –0,620 0,000 Ein- oder zweiachsiges Biegeknicken
Es seien x die Stab- bzw. Balkenachse, y und z die Hauptträgheitsachsen des (nicht verwundenen) Querschnittes. Dann ist – wenn die Randbedingungen es erlauben – ein Ausweichen der Stabachse
- nur in der x,y-Ebene (einachsiges Knicken, maßgebend Iz) oder
- nur in der x-z-Ebene (einachsiges Knicken, maßgebend Iy) oder
- in beiden Ebenen gleichzeitig (zweiachsiges Knicken)
möglich. Letztere Möglichkeit ist insbesondere dann zu berücksichtigen, wenn Knicklasten für das einachsige Knicken in den beiden Ebenen nicht weit auseinander liegen. Eine getrennte Behandlung der beiden einachsigen Knickvorgänge ist dann nicht möglich, weil Einflüsse nichtlinearen Materialverhaltens eine Kopplung bewirken.
Knicken unter Eigengewicht
Ein Knicken unter dem Eigengewicht ist ein Stabilitätsfall, der nicht mit den von Euler oder von Tetmajer überlieferten Lösungsansätzen berechnet werden kann. Ein ganz klassisches Beispiel für dieses Problem sind die Schornsteine großer Kohlekraftwerke. Die Bestimmung der notwendigen Flächenträgheitsmomente für einen solchen Fall kann mit dem Verfahren von Ritz erfolgen.
Drillknicken und Biegedrillknicken
Reines Drillknicken (Verdrillung des Stabes bei unverändert gerader Stabachse) ist im Allgemeinen nicht von praktischem Interesse, weil ein Ausweichen der Stabachse in der Regel bereits bei geringeren Lasten eintritt.
 Biegedrillknicken an einem mittig durch eine Einzelkraft belastetem Doppel-T-Träger: a) Ansicht (ohne Verformung gezeichnet), b) Querschnitt in Auflagernähe, c) infolge Biegedrillknickens verdrehter Querschnitt in Trägermitte
Biegedrillknicken an einem mittig durch eine Einzelkraft belastetem Doppel-T-Träger: a) Ansicht (ohne Verformung gezeichnet), b) Querschnitt in Auflagernähe, c) infolge Biegedrillknickens verdrehter Querschnitt in TrägermitteDagegen ist die Stabilität eines Trägers unter Umständen auch dann durch Biegedrillknicken gefährdet, wenn keine Druckkräfte vorhanden sind. Das Bild zeigt ein Beispiel, eine ältere Bezeichnung für das Versagen eines biegebelasteten Trägers durch Biegedrillknicken ist Kippen.
Der Widerstand gegen Biegedrillknicken wird neben den oben angeführten Einflüssen durch die Verdrehsteifigkeit und durch verdrehungsbehindernde Stützung des Balkens beeinflusst.
Mathematische Modelle des Knickproblems
Die Differentialgleichung des Knickproblems kann durch die Formulierung der Gleichgewichtsbedingungen am verformten Stab oder Balken gewonnen werden (Theorie II. Ordnung, siehe Baustatik).
 Verformung-Kraft-Verlauf des Knickvorganges bei unterschiedlichen mathematischen Modellen
Verformung-Kraft-Verlauf des Knickvorganges bei unterschiedlichen mathematischen ModellenWird die Differentialgleichung für einen geraden, unbeschränkt elastischen Stab bei mittiger Lasteintragung linearisiert, so führt das mathematisch auf ein Eigenwertproblem. Beim ersten Eigenwert verzweigt sich die Lösung der Differentialgleichung, die Grenze der Stabilität ist erreicht (schwarze horizontale Linie). Verzichtet man auf die Linearisierung der Differentialgleichung, dann zeigt sich, dass mit rasch wachsender Verformung noch eine (geringe) Laststeigerung erreicht werden kann (gestrichelte schwarze Linie).
Werden die (unvermeidlichen) Imperfektionen (Vorverformungen der Stabachse, Ungleichmäßigkeiten des Werkstoffes, Eigenspannungen, Exzentrizität der Lasteintragung) berücksichtigt, dann entsteht eine inhomogene Differentialgleichung (kein Eigenwertproblem). Die Verformungen nehmen schon vor dem Erreichen der Verzweigungslast stark zu. Die Kurve nähert sich – wenn die Differentialgleichung linearisiert wurde – der Verzweigungslast asymptotisch (rote Kurve). Voraussetzung dafür ist, dass der Werkstoff im rein elastischen Bereich bleibt und die Stäbe schlank sind.
Bei einer Teilplastifizierung des Querschnittes bei gedrungenen Stäben unterhalb der Verzweigungslast kann diese nicht erreicht werden (blaue Kurve).
Knicknachweis bei stabilitätsgefährdeten Stabkonstruktionen aus Stahl
DIN 18800, Teil 2, lässt 2 Verfahren zu:
- Berechnung des Gesamtsystems nach Theorie II. Ordnung, wobei die zu berücksichtigenden Imperfektionen durch die Norm vorgegeben sind oder
- Anwendung des „Ersatzstabverfahrens“ für die einzelnen Stäbe. Hier sind die zu berücksichtigenden Imperfektionen implizit im Berechnungsverfahren enthalten.
Das Omega-Verfahren
Das ω-Verfahren wurde von der Deutschen Reichsbahn für die eigenen Stahlbrücken aus Baustahl entwickelt und war in der DIN 4114 festgelegt. Es lieferte einen sehr einfachen Nachweis der Knicksicherheit. In Abhängigkeit vom Schlankheitsgrad
 wurden die Knickzahlen
wurden die Knickzahlen  in zwei Tabellen für die Werkstoffe S235JR+AR (St37) und S355J2+N (St52) aufgetragen. Bei Schlankheitsgraden kleiner als 20 war kein Knicksicherheitsnachweis notwendig; Schlankheitsgrade größer 250 waren unzulässig. Die auch -Zahlen genannten Knickwerte lagen zwischen 1 und 10,55 bei S235JR+AR. Der Sicherheitsnachweis hatte die folgende Form:
in zwei Tabellen für die Werkstoffe S235JR+AR (St37) und S355J2+N (St52) aufgetragen. Bei Schlankheitsgraden kleiner als 20 war kein Knicksicherheitsnachweis notwendig; Schlankheitsgrade größer 250 waren unzulässig. Die auch -Zahlen genannten Knickwerte lagen zwischen 1 und 10,55 bei S235JR+AR. Der Sicherheitsnachweis hatte die folgende Form:Die Wert von σzul entspricht der zulässigen Druckspannung für den entsprechenden Werkstoff im zugehörigen Lastfall. Der große Vorteil des Verfahrens lag in der Tatsache, dass der Knicknachweis auf einen einfachen Spannungsnachweis mit Druckkräften reduziert wurde. In den ω-Zahlen waren Knicksicherheiten von 1,3 bis 1,5 eingearbeitet.
Für den Fall, dass keine Tafel der
-Zahlen zur Verfügung steht, können für den Werkstoff S235JR+AR (St37) die ω-Zahlen näherungsweise nach der folgenden Formel bestimmt werden:Das Verfahren wurde zwischenzeitlich durch andere und genauere Verfahren ersetzt, besitzt aber durch seine Anschaulichkeit aber noch eine gewissen Bedeutung in der Ausbildung von Ingenieuren.
Lebende knickgefährdete Strukturen
 Halme der Rasenschmiele als durch das Eigengewicht knickgefährdete lebende Struktur
Halme der Rasenschmiele als durch das Eigengewicht knickgefährdete lebende StrukturIn der Biologie gibt es eine große Anzahl knickgefährdeter Strukturen. Zu ihnen gehören die Sprossachsen der Gräser und die Röhrenknochen der Wirbeltiere. An beiden Beispielen ist gut zu erkennen, worin der beste Schutz gegen ein Versagen durch diesen Stabilitätsausfall besteht: Beide Strukturen sind rohrähnlich mit dünner Wandstärke im Vergleich zum Durchmesser. Die Begründung dazu liefert die Formel zur Eulerschen Knickkraft:
- Der Elastizitätsmodul ist vom natürlichen Werkstoff der Struktur abhängig,
- Die Knicklänge ist von ihrer Größe abhängig,
- Der Knicklängenbeiwert
 ist von ihrer Lagerung an ihren Rändern abhängig.
ist von ihrer Lagerung an ihren Rändern abhängig.
Alle drei Werte können wegen dieser Abhängigkeiten nicht mehr optimiert werden. Als letzte Größe bleibt das Flächenträgheitsmoment
, und das wird mit dem kreisringförmigen Querschnitt eines Rohres maximal bei gegebenem Materialaufwand. Hinzu kommt, dass ein Rohrquerschnitt in allen Achsen das gleiche Flächenträgheitsmoment besitzt und somit (gleiche -Werte vorausgesetzt) in allen Richtungen ein gleiches Knickverhalten hat. Weiterhin bietet dieser Querschnitt einen optimalen Widerstand gegen ein Versagen durch Biegen und Torsion.Literatur
- István Szabó: Einführung in die Technische Mechanik. 8. neu bearbeitete Auflage 1975, Nachdruck 2003, ISBN 3-540-44248-0
Weblinks





![{\sigma_\mathrm{k}} = a + b \cdot \lambda + c \cdot {\lambda^2}, \qquad \left[\frac {\mathrm N}{ \mathrm{mm}^2}\right]](0/5c03568ae88a83116c54515b880111dc.png)




Wikimedia Foundation.