- Normalkomponente
-
In der Geometrie ist ein Normalenvektor (auch: Normalvektor) ein Vektor, der senkrecht (orthogonal) auf einer Geraden, Kurve, Ebene, (gekrümmten) Fläche oder einer höherdimensionalen Verallgemeinerung eines solchen Objekts steht. Die Gerade, die diesen Vektor als Richtungsvektor besitzt, heißt Normale. Ein Normaleneinheitsvektor ist ein Normalenvektor der Länge 1 (ein sogenannter normierter Vektor).
In diesem Artikel wird zunächst der Fall der Geraden (in einer Ebene) und der Ebene (im dreidimensionalen Raum) behandelt (Lineare Algebra und analytische Geometrie), dann der Fall der ebenen Kurve und der Fläche (Differentialgeometrie).
Inhaltsverzeichnis
Lineare Algebra und analytische Geometrie
In diesem Abschnitt werden die Variablen für Vektoren, wie in der Schulmathematik üblich, durch Vektorpfeile gekennzeichnet.
Normale und Normalenvektor einer Geraden
Ein Normalenvektor einer Geraden g in der Ebene ist ein (vom Nullvektor verschiedener) Vektor, der senkrecht auf dieser Geraden steht, also der Richtungsvektor einer Geraden, die senkrecht auf g steht (Orthogonale oder Normale zu g).
Hat g den Richtungsvektor
 , so sind die beiden Vektoren ( − b,a) und (b, − a) Normalenvektoren. Durchläuft man die Gerade in der Richtung von
, so sind die beiden Vektoren ( − b,a) und (b, − a) Normalenvektoren. Durchläuft man die Gerade in der Richtung von  , so weist ( − b,a) nach links und (b, − a) nach rechts.
, so weist ( − b,a) nach links und (b, − a) nach rechts.Ist die Gerade in der Steigungsform durch die Gleichung
- y = mx + c
gegeben, so ist der Vektor (1,m) ein Richtungsvektor der Geraden und ( − m,1) und (m, − 1) sind Normalenvektoren. Für
 hat also jede Normale die Steigung
hat also jede Normale die Steigung  . Ist m = 0, also g horizontal, so ist jede Normale vertikal, hat also eine Gleichung der Form x = a.
. Ist m = 0, also g horizontal, so ist jede Normale vertikal, hat also eine Gleichung der Form x = a.Ist die Gerade in der allgemeinen Form
- ax + by = d
gegeben, so ist (a,b) ein Normalenvektor.
Hat man einen Normalenvektor, so erhält man einen Normaleneinheitsvektor, indem man diesen durch seine Länge (Norm, Betrag) dividiert (den Vektor also normiert). Einen zweiten Normalenvektor erhält man durch Multiplikation mit − 1. Aus einem Normalenvektor erhält man alle anderen durch Multiplikation mit einer reellen Zahl ungleich null.
Normale und Normalenvektor einer Ebene
Ein Normalenvektor einer Ebene E im dreidimensionalen Raum ist ein (vom Nullvektor verschiedener) Vektor, der senkrecht auf dieser Ebene steht, also der Richtungsvektor einer Geraden, die senkrecht auf E steht (Orthogonale oder Normale zu E).
Ist die Ebene in der Normalform
- ax + by + cz = d
gegeben, so ist (a,b,c) ein Normalenvektor.
Ist E durch zwei aufspannende Vektoren
 und
und  gegeben (Punkt-Richtungs-Form oder Parameterform), führt die Bedingung, dass der Normalenvektor
gegeben (Punkt-Richtungs-Form oder Parameterform), führt die Bedingung, dass der Normalenvektor  senkrecht auf
senkrecht auf  und steht, auf ein lineares Gleichungssystem für die Komponenten n1,n2,n3 von
und steht, auf ein lineares Gleichungssystem für die Komponenten n1,n2,n3 von  :
:Jede von (0,0,0) verschiedene Lösung liefert einen Normalenvektor.
Eine andere Möglichkeit, Normalenvektoren zu bestimmen, bietet das Kreuzprodukt:
ist ein Vektor, der senkrecht auf
und steht, und  bilden in dieser Reihenfolge ein Rechtssystem.
bilden in dieser Reihenfolge ein Rechtssystem.Hat E die Gleichung
- z = ax + by + c,
so ist ( − a, − b,1) ein nach oben weisender und (a,b, − 1) ein nach unten weisender Normalenvektor.
Wie im Fall der Geraden in der Ebene erhält man aus einem Normalenvektor einen Normaleneinheitsvektor, indem man ihn durch seine Länge dividiert, einen zweiten durch Multiplikation mit − 1 und alle andern Normalenvektor durch Multiplikation mit reellen Zahlen.
Eine Ebene wird durch einen Normalenvektor sowie einen auf der Ebene liegenden Punkt eindeutig bestimmt, siehe Normalenform und hessesche Normalform.
Normalenvektoren von Kurven und Flächen
Ebene Kurven
In der Analysis und in der Differentialgeometrie ist der Normalenvektor zu einer ebenen Kurve (in einem bestimmten Punkt) ein Vektor, der auf dem Tangentialvektor in diesem Punkt orthogonal (senkrecht) steht. Die Gerade in Richtung des Normalenvektors durch diesen Punkt heißt Normale, sie ist orthogonal zur Tangente.
Ist die Kurve als Graph einer differenzierbaren Funktion f gegeben, so hat die Tangente im Punkt p = (x0,f(x0)) die Steigung
 , die Steigung der Normalen beträgt also
, die Steigung der Normalen beträgt alsoDie Normale im Punkt p = (x0,f(x0)) ist dann durch die Gleichung
- y = f(x0) + mn(x − x0),
also durch
gegeben.
Ist die ebene Kurve in Parameterform gegeben, c(t) = (c1(t),c2(t)), so ist
 ein Tangentialvektor im Punkt c(t) und
ein Tangentialvektor im Punkt c(t) und  ein nach rechts weisender Normalenvektor. Hier bezeichnet, wie in der Differentialgeometrie üblich, der Punkt die Ableitung nach dem Kurvenparameter.
ein nach rechts weisender Normalenvektor. Hier bezeichnet, wie in der Differentialgeometrie üblich, der Punkt die Ableitung nach dem Kurvenparameter.Bei Raumkurven bilden die Normalenvektoren in einem Punkt (wie im Fall der Geraden im Raum) einen zweidimensionalen Untervektorraum. In der elementaren Differentialgeometrie wählt man einen Einheitsvektor aus, der in die Richtung zeigt, in die die Kurve gekrümmt ist. Diesen nennt man Hauptnormalen(einheits)vektor, siehe Frenetsche Formeln.
Flächen im dreidimensionalen Raum
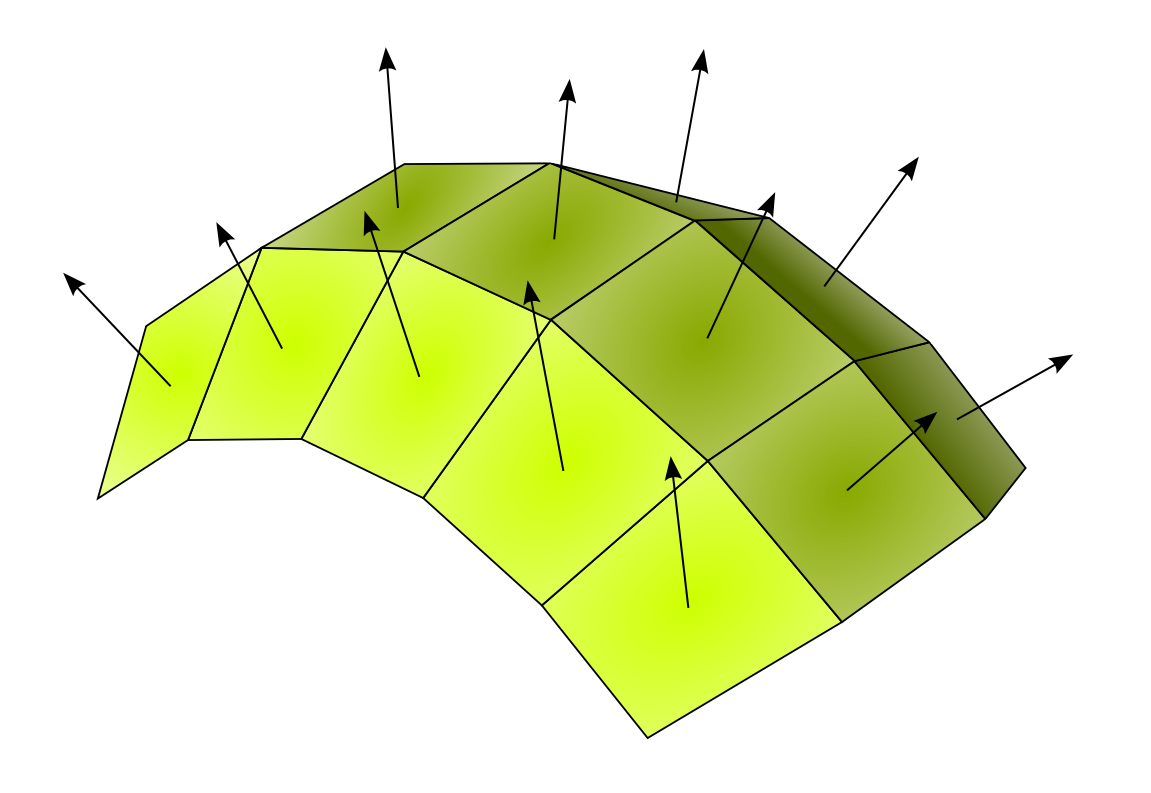
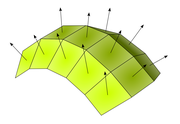 Zur Veranschaulichung des Normalenvektors
Zur Veranschaulichung des NormalenvektorsEntsprechend ist der Normalenvektor einer gekrümmten Fläche (Topologie) in einem Punkt der Normalenvektor der Tangentialebene in diesem Punkt.
Ist die Fläche durch die Parameterdarstellung
gegeben, so spannen die beiden Vektoren
 und
und 
die Tangentialebene im Punkt F(u,v) auf. (Hier wird vorausgesetzt, dass die Fläche bei (u,v) regulär ist, also dass Fu(u,v) und Fv(u,v) linear unabhängig sind.) Ein Normalenvektor im Punkt F(u,v) ist ein Vektor, der senkrecht auf Fu(u,v) und Fv(u,v) steht, z. B. der durch das Kreuzprodukt gegebene und dann normierte Hauptnormalenvektor
Hier bezeichnen die Betragsstriche die euklidische Norm des Vektors.
Ist die Fläche implizit durch eine Gleichung gegeben,
- g(x,y,z) = 0,
wobei
 eine differenzierbare Funktion ist, so ist der Gradient
eine differenzierbare Funktion ist, so ist der Gradientein Normalenvektor der Fläche im Punkt (x,y,z) (vorausgesetzt, dass er dort nicht verschwindet).
Ist die Fläche als Graph einer differenzierbaren Funktion
 gegeben, so ist
gegeben, so istein nach oben weisender Normalenvektor im Punkt p = (x,y,f(x,y)). Dies erhält man, indem man verwendet, dass die Abbildung F(x,y) = (x,y,F(x,y)) eine Parametrisierung ist oder dass die Fläche durch die Gleichung
- g(x,y,z): = z − f(x,y) = 0
dargestellt wird.
Verallgemeinerungen
Der Begriff des Normalenvektors lässt sich verallgemeinern auf
- affine Unterräume (verallgemeinerte Ebenen) in euklidischen Räumen höherer Dimension (Mathematik) (insbesondere auf Hyperebenen),
- Flächen, Hyperflächen und Untermannigfaltigkeiten in euklidischen Räumen höherer Dimension,
- Flächen, Hyperflächen und Untermannigfaltigkeiten von Riemannschen Mannigfaltigkeiten,
- Nichtglatte Objekte, wie konvexe Körper und rektifizierbare Mengen.
Anwendungen
Im Bereich der Computergrafik werden Normalenvektoren unter Anderem genutzt, um festzustellen, ob eine Fläche dem Benutzer zugewandt ist oder nicht. Der Einsatz von Normalenvektoren erlaubt dadurch Back Face Culling. Des Weiteren werden sie zur Berechnung von Lichteinfall und Reflexionen benötigt.




Wikimedia Foundation.