- Radar
-
Radar ist die Abkürzung für Radio Detection and Ranging (frei übersetzt: „Funkortung und -abstandsmessung“), ursprünglich Radio Aircraft Detection and Ranging (frei übersetzt: „funkbasierte Flugzeugortung und -abstandsmessung“) und ist die Bezeichnung für verschiedene Erkennungs- und Ortungsverfahren und -geräte auf der Basis elektromagnetischer Wellen im Radiofrequenzbereich (Funkwellen). Der Begriff Radar hat in der Vergangenheit die ursprüngliche, deutsche Bezeichnung „Funkmeß“ ersetzt.
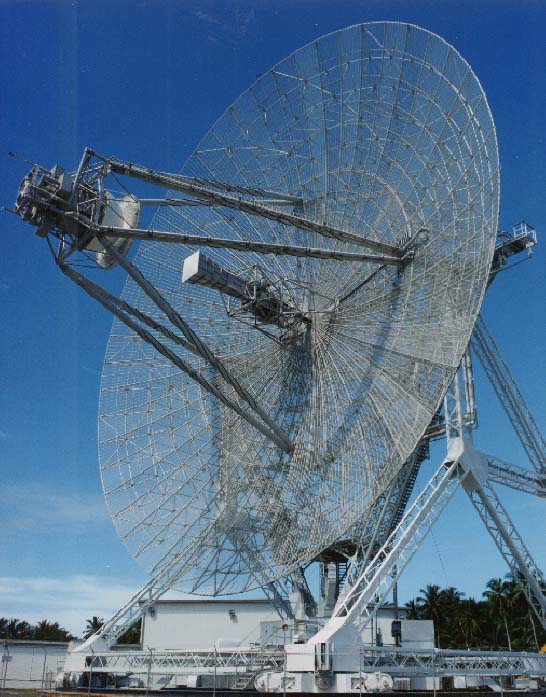
 Radarantenne
Radarantenne
Inhaltsverzeichnis
Allgemeines
 Radarmonitor in der Flugüberwachung
Radarmonitor in der FlugüberwachungEin Radargerät ist ein Gerät, das elektromagnetische Wellen gebündelt als sogenanntes Primärsignal aussendet, die von Objekten reflektierten „Echos“ als Sekundärsignal empfängt und nach verschiedenen Kriterien auswertet. So können Informationen über die Objekte gewonnen werden. Meist handelt es sich um eine Ortung (Bestimmung von Entfernung und Winkel). Es gibt je nach Einsatzzweck unterschiedliche Radarprinzipien wie das Wetterradar, das harmonische Radar und das Überhorizontradar.
Aus den empfangenen, vom Objekt reflektierten Wellen können u. a. folgende Informationen gewonnen werden:
- der Winkel bzw. die Richtung zum Objekt
- die Entfernung zum Objekt (aus der Zeitverschiebung zwischen Senden und Empfangen, siehe Lichtgeschwindigkeit)
- die Relativbewegung zwischen Sender und Objekt – sie kann durch den Doppler-Effekt aus der Verschiebung der Frequenz des reflektierten Signals berechnet werden
- das Aneinanderreihen einzelner Messungen liefert die Wegstrecke und die Absolutgeschwindigkeit des Objektes
- bei guter Auflösung des Radars können Konturen des Objektes erkannt werden (z. B. der Flugzeugtyp) oder sogar Bilder gewonnen werden (Erd- und Planetenerkundung).
Die aus dem Deutschen kommende ursprüngliche Bezeichnung Funkmeßtechnik (kurz Funkmeß) wurde nach dem Zweiten Weltkrieg in der Bundesrepublik Deutschland durch den Begriff Radar ersetzt. In der DDR wurde in der Fachsprache weiterhin von Funkmeßtechnik gesprochen.
Geschichte

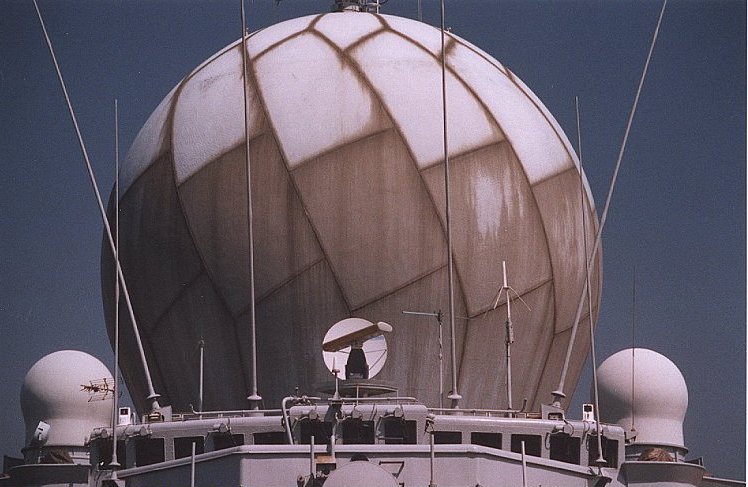
 Die Radarkuppel, die das Radar DRBI 23 schützt. (Juli 1998)
Die Radarkuppel, die das Radar DRBI 23 schützt. (Juli 1998)Heinrich Hertz stellte 1886 beim experimentellen Nachweis von elektromagnetischen Wellen fest, dass Radiowellen von metallischen Gegenständen reflektiert werden.
Elf Jahre später wiederholte der Inder Jagadish Chandra Bose die Hertzschen Versuche in Kalkutta, diesmal jedoch mit einer kürzeren Wellenlänge als Hertz. Auf der Basis dieser Versuche entwickelte Bose unter anderem den Wellenleiter – eine wichtige Komponente von Radargeräten.
Die ersten Versuche der Ortung mittels Radiowellen führte 1904 der deutsche Hochfrequenztechniker Christian Hülsmeyer durch. Beim Experimentieren stellte Hülsmeyer fest, dass von einem Sender ausgesandte und von Metallflächen zurückgeworfene elektrische Wellen zur Ermittlung entfernter metallischer Objekte verwendet werden können. Das von ihm entwickelte Telemobiloskop konnte die Laufzeit von Wellen, die von einem Schiff zurückgeworfen wurden, messen.
Das zugrundeliegende Verfahren wurde am 30. April 1904 zum Patent angemeldet.[1][2]
Der Titel der Patentschrift Nr. 165546 lautete:
„Verfahren, um entfernte metallische Gegenstände mittels elektrischer Wellen einem Beobachter zu melden.
Vorliegende Erfindung hat eine Vorrichtung zum Gegenstand, durch welche die Annäherung beziehungsweise Bewegung entfernter metallischer Gegenstände (Schiffe, Züge oder dergleichen) mittels elektrischer Wellen einem Beobachter durch hör- oder sichtbare Signale gemeldet wird […]“Wahrscheinlich unbeeinflusst von Hülsmeyers Patent wurden 1911 in den USA die Grundprinzipien des Radars vom Science-Fiction-Autor und Erfinder Hugo Gernsback in seinem Science-Fiction-Roman Ralph 124C 41+ skizziert. Gernsbacks Buch geht auf einen Fortsetzungsroman zurück, der in der Technikzeitschrift Modern Electrics zwischen April 1911 und März 1912 veröffentlicht wurde.
1916 wandte sich der Ingenieur und Buchautor Hans Dominik mit einem selbst entwickelten Prototypen an das Reichsmarineamt. Das Reichsmarineamt lehnte aber ab da ein Einsatz für den laufenden Ersten Weltkrieg nicht mehr in Frage kam.
Die Suche nach neuen physikalischen Prinzipien zur Lösung des Problems der Erkennung und Standortbestimmung von Luft- und Seezielen führte Mitte der 1930er Jahre in mehreren Ländern nahezu gleichzeitig zur Entwicklung der Radartechnik.
Geschichte der Radarentwicklung in Deutschland
 Radargerät "Würzburg C" (1942)
Radargerät "Würzburg C" (1942)Der Durchbruch zur breiten Anwendung kam für die Radartechnik erst im Zweiten Weltkrieg. Dr. Rudolf Kühnhold, der wissenschaftliche Direktor der Nachrichten-Versuchsabteilung der Reichsmarine, trieb die Entwicklung entscheidend voran. 1934 wurden im Kieler Hafen die ersten Versuche mit einem von ihm entwickelten Apparat durchgeführt, der zur Tarnung DeTe-Gerät (Dezimeter-Telegraphie) genannt wurde. Bei seinen Versuchen konnte er nicht nur wie geplant Schiffe, sondern auch über den Hafen fliegende Flugzeuge orten.
Noch war die Entfernung, bis zu der das Radar arbeitete, für eine breite Nutzung ungeeignet, doch bereits im Oktober 1934 gelangen Entfernungsmessungen bis etwa 40 km. Einer der ersten Hersteller von Radargeräten war die Anfang 1934 gegründete GEMA (Gesellschaft für elektroakustische und mechanische Apparate mbH, Berlin). Hans Karl Freiherr von Willisen und Paul-Günther Erbslöh entwickelten und erprobten in Pelzerhaken die Systeme Freya, Mammut (PESA), Wassermann und Seetakt sowie Seeartgerät. Nach Kriegsende wurde die GEMA als Rüstungsbetrieb aufgelöst und die Standorte in den Ausweichquartieren Pelzerhaken und Lensahn demontiert.
Neben der GEMA hatte Telefunken mit dem bodengestützten Feuerleitradar Würzburg und Würzburg-Riese sowie dem ersten in Deutschland verfügbaren Bordradarsystem für Nachtjäger („Lichtenstein-Gerät") den größten Anteil an der deutschen Radartechnik. Von Siemens & Halske wurden die Jagdschloss- und Flensburg-Geräte entwickelt. Weitere auf dem Gebiet tätige Unternehmen waren die Blaupunkt GmbH (früher Ideal-Radio) und die C. Lorenz AG (beide in Berlin).
Die folgenden Systeme wurden entwickelt :
- aktive monostatische Radargeräte, die mit Sender und Empfänger an einem Standort arbeiten, genannt Funkmessgerät (FuMG);
- passiv defensive Radarwarnempfänger, die nur zur Warnung vor feindlichem aktiven Radar von Flugzeugen und Schiffen dienten, genannt Funkmessbeobachtungsgeräte (FuMB), wie zum Beispiel
- passiv offensive Radarempfänger zur Annäherung an feindliche Flugzeuge mit eigenem aktivem Radar, wie zum Beispiel
- parasitäre bistatische Radargeräte, die zur Zielbeleuchtung ein feindliches Radarsystem (Chain Home) missbrauchten, wie zum Beispiel
- Klein Heidelberg
Im Zweiten Weltkrieg erlangte die Radartechnik in der Seekriegs-, vor allem aber auch in der Luftkriegsführung große Bedeutung und wurde dort in Verbindung mit Flakstellungen und zur Führung von Jagdflugzeugen eingesetzt. Der erste erfolgreiche radargeleitete Abfangeinsatz der Geschichte war am 18. Dezember 1939, als 24 britische Bomber einen Angriff auf Wilhelmshaven flogen. Nach deren Ortung wurden durch Jäger zehn Bomber abgeschossen und drei schwer beschädigt.[3] Die über 1000 km lange Kammhuber-Linie von Dänemark bis Nordfrankreich war ein Abwehrsystem gegen nächtliche Bombergeschwader auf das Deutsche Reich. Es bestand unter anderem aus Radargeräten der Typen Würzburg Riese und Freya.
Noch bis in die 1950er Jahre wurde im deutschsprachigen Raum der Begriff „Funktastsinn“ für das Radarverfahren verwendet.
Geschichte der Radarentwicklung in England
Während sich die Radarentwicklung in Deutschland am Anfang mit dem Erkennen von Schiffszielen beschäftigte, war in England die Erkennung von Flugzeugen der Ausgangspunkt der Entwicklung.
Bereits in der Ionosphären-Forschung hatte man Funkimpulse verwendet und aus der Laufzeit bis zum Eintreffen des reflektierten Signals die Höhe der Ionosphäre bestimmt. Diese Methode wurde nun für die Funkortung weiterentwickelt. Der Leiter der Radioversuchsstation in Slough, Robert Watson-Watt, und sein Mitarbeiter, der Physiker Arnold Wilkins, legten am 12. Februar 1935 ihren Bericht zum Thema Erkennung und Ortung von Flugzeugen durch Funk vor, in dem sie bereits alle wesentlichen Grundzüge des Radars beschrieben.
Am 26. Februar 1935 wurde der erste Feldversuch durchgeführt. Der BBC-Sender in Daventry sendete ein Signal mit 49 m Wellenlänge. Dies war auf die Flügelspannweite üblicher Bomber-Flugzeuge abgestimmt, die bei ungefähr der Hälfte dieser Länge lagen und somit Halbwellendipole darstellten. Hiervon wurden gute Reflexionseigenschaften erwartet. Eine mobile Empfangsstation, ausgerüstet mit einem für damalige Zeit sehr modernen Kathodenstrahl-Oszilloskop, befand sich in ca. 10 km Entfernung. Das über diesem Gebiet fliegende Testflugzeug erzeugte tatsächlich durch die an seinem Rumpf reflektierten Funkwellen einen zusätzlichen Leuchtpunkt auf dem Schirm des Oszilloskops. Das Flugzeug konnte bereits bei diesem ersten Test bis zu einer Entfernung von 13 km verfolgt werden.
Nach diesen erfolgreichen Testergebnissen wurde die englische Radarentwicklung mit hohem Aufwand begonnen. Bereits im Januar 1936 waren für alle Aspekte der Radarortung (Entfernung, Höhenwinkel und Ortungsrichtung) Lösungen gefunden worden. Sogar das Prinzip eines Zielfolgeradars konnte am 20. Juni 1939 vor Winston Churchill praktisch demonstriert werden.
Im Jahre 1937 begann man, an der Ostküste der britischen Insel eine Kette von 20 Küsten-Radar-Stellungen, die sogenannte Chain Home, zu installieren. Sie arbeitete bei 10 bis 13,5 m Wellenlänge (22 bis 30 MHz), sendete 25 Pulse pro Sekunde mit 200 kW Leistung und hatte eine Reichweite von 200 km. Ab Karfreitag 1939 war diese Radarkette im 24-Stunden-Dauerbetrieb.
Die Deutschen entdeckten die hierzu installierten hohen Masten und unternahmen daher mit dem Luftschiff LZ 130 Graf Zeppelin II im Mai und August 1939 zwei Aufklärungsflüge entlang der britischen Ostküste bis zu den Shetland-Inseln, um den Stand der englischen Radartechnik zu erkunden. Sie fanden jedoch keine Radarsignale, da sie Signale im Bereich von 1,5 bis 0,5 m Wellenlänge erwarteten, die englischen Radarstationen jedoch den für die deutschen Ingenieure völlig abwegigen Bereich von 10 m Wellenlänge benutzten.
Chain Home hatte zwar eine hohe Reichweite, konnte aber keine Tiefflieger entdecken. Deshalb wurde zusätzlich Chain Home Low, eine Tiefflug-Radarkette mit 80 km Reichweite bei 1,5 m Wellenlänge (200 MHz), installiert.
Die Radarkette erwies sich als wichtiger Vorteil in der Luftschlacht um England, da die deutschen Angriffe rechtzeitig erkannt werden konnten.
Bald wurden auch Radargeräte für den Einsatz in Flugzeugen entwickelt. Erste Geräte waren aufgrund ihrer Wellenlänge von minimal 50 cm nur mäßig brauchbar. Zwei britischen Forschern gelang am 21. Februar 1940 der Aufbau des ersten Laborgerätes eines Magnetrons zur Erzeugung von 10-cm-Wellen. Hieraus wurde das H2S-Gerät entwickelt, ein Bordradar für Flugzeuge, mit dem die Konturen der Landschaft wie auf einer Karte dargestellt wurden. Der erstmalige Einsatz erfolgte am 30. und 31. Januar 1943 bei einem Bombenangriff auf Hamburg.
Gegen Radar wurden sogenannte Düppel entwickelt - ein einfaches Mittel, um Radar zu stören. Deutschland und England hatten dieses Mittel unabhängig voneinander entwickelt und es geheim gehalten, um nicht zu verraten, wie das eigene Radar gestört werden könnte. Düppel sind Metallfolienstreifen, die etwa auf die halbe Wellenlänge der verwendeten Radargeräte zugeschnitten und von Flugzeugen in großer Menge abgeworfen wurden. Die Engländer setzten diese Methode bei der Operation Gomorrha, dem Brandbombenangriff auf Hamburg am 24. Juli 1943, ein. Es wurden 92 Mio. Streifen, das entspricht 40 Tonnen, abgeworfen. Auf deutscher Seite dauerte die Entwicklung eines geeigneten Gegenmittels nicht lange: Das verbesserte Würzburg-Radargerät konnte bewegte Objekte wie Flugzeuge von den stillstehenden Metallstreifen trennen und die Geschwindigkeit des Ziels anhand des Doppler-Effektes bestimmen.
Geschichte der Radarentwicklung in der Sowjetunion
Die Tatsache einer eigenständigen Entwicklung in der Sowjetunion wird von westlichen Quellen kaum erwähnt, dabei zeichnet sich diese durch eine Reihe interessanter Lösungen aus. Die sowjetische Radarentwicklung erfolgte unter den Bedingungen der internationalen Isolierung der UdSSR und später der Auslagerung von Konstruktions- und Produktionskapazitäten nach Osten.
Popow hat 1895 in Sankt Petersburg die ersten Radiosignale übertragen und hat dabei auch die Eigenschaft der Reflektierung von Radiowellen an Gegenständen entdeckt. In den 1920er Jahren erbrachten russische und ukrainische Wissenschaftler theoretische Vorleistungen bezüglich der Anwendung der Rückstrahlortung mittels elektromagnetischer Wellen. Bontsch-Brujewitsch, Arenberg und Wwedenski untersuchten das Reflexionsverhalten elektromagnetischer Wellen. Durch Mandelstam und Papaleksi erfolgten phasometrische Entfernungsmessungen zur Bestimmung der Höhe der Ionosphäre mit elektromagnetischen Impulsen.
Die Idee der Anwendung von Funkwellen zur Entdeckung und Standortbestimmung von Flugkörpern entstand gleichzeitig in zwei Verwaltungen des Volkskommissariats für Verteidigung - in der Militärtechnischen Verwaltung 1930 im Plan für ein Aufklärungsmittel der Flakartillerie und in der Verwaltung Luftverteidigung 1932/33 zur Verbesserung der Luftraumaufklärung. Ende 1933 wurden auf Initiative des Militäringenieurs M.M. Lobanow im Zentralen Radiolaboratorium Untersuchungen zur Rückstrahlortung mit Dezimeterwellen begonnen. Unter Leitung von J.K. Korowin wurde erstmals ein Flugzeug mit einer Versuchsanordnung geortet, die aus einem 60-cm-Dauerstrichsender, einem Superregenerativempfänger und zwei Parabolantennen für Senden und Empfang bestand.
Im Januar 1934 fand unter Leitung des Akademiemitglieds A.F. Joffe eine Beratung namhafter Spezialisten statt, die die Ideen des Ingenieurs P.K. Ostschepkow für ein System der Luftraumaufklärung mittels elektromagnetischer Wellen unterstützte. In der “Zeitschrift der Luftverteidigung”, Heft 2/1934, veröffentlichte Ostschepkow seine Gedanken über ein Aufklärungssystem der Luftverteidigung, die Vorteile der Impulsmethode für die Ortung von Luftzielen und der Idee einer Rundblickstation, die gleichzeitig Entfernung und Seitenwinkel eines Flugkörpers bestimmt.
RUS-1
Noch 1934 begannen umfangreiche Arbeiten zur Realisierung der Funkortung unter Nutzung von Dauerstrichstrahlung. Im August 1934 wurde die Versuchsanordnung “Rapid” erprobt, die aus einem 200-W-Sender auf der Wellenlänge 4,7 m und zwei im Abstand von 50 bzw. 70 km aufgebauten Empfangsanlagen bestand. Der Durchflug eines Flugzeuges in 5200 m Höhe konnte anhand der Schwebungen, die durch Interferenz von direkter und reflektierter Welle gebildet wurden, zuverlässig registriert werden ("Radargeist"). Daraus entstand später das System „Rewen“, welches 1939 als RUS-1 (radioulowitel samoljotow) in die Ausrüstung der Roten Armee übernommen wurde. Zu Kriegsbeginn 1941 waren in der Luftverteidigung Moskaus und Leningrads 41 Gerätesätze RUS-1 eingesetzt.
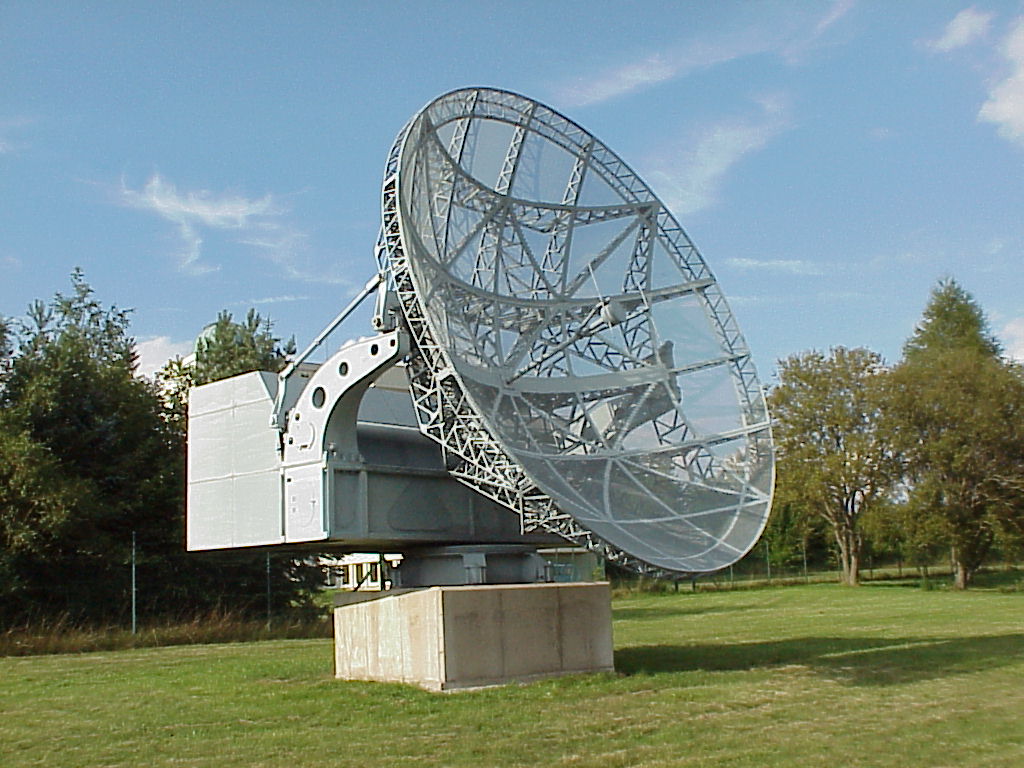
Impulsfunkmessstation RUS-2
Anfang 1935 begannen im Physikalisch-Technischen Institut der Akademie der Wissenschaften unter Leitung von J. B. Kobsarew Arbeiten, die zur Konstruktion der ersten sowjetischen Impulsfunkmessstation führten. Noch im selben Jahr wurde der Beweis erbracht, dass man mit einem Impulsradar auf der Wellenlänge von 4 m eine Ortungsentfernung von 100 km erreichen kann. Es folgten erfolgreiche Versuche mit Uda-Yagi-Antennen und die Entwicklung spezieller Impulssenderöhren (IG-7, IG-8). Bis 1939 entstand so die mobile Impulsfunkmessstation “Redoute”, die nach erfolgreicher Truppenerprobung im Juli 1940 als RUS-2 in die Ausrüstung übernommen wurde. In ihrer ursprünglichen Variante bestand die RUS-2 aus einer drehbaren Kabine mit dem 50-kW-Sender und der Sendeantenne auf einem Kraftfahrzeug ZIS-6, einer Kabine mit Empfangsantenne, Empfangsapparatur und einer Elektronenstrahlröhre als Sichtgerät auf einem Kraftfahrzeug GAZ-3A sowie einem Stromversorgungsgerät auf der Pritsche eines weiteren GAZ-3A. Die für Senden und Empfang gleichartigen Antennen, die synchron bewegt wurden, bestanden aus einem aktiven Strahler, einem Reflektor und fünf Direktoren für die Wellenlänge von 4 m. Mit der Realisierung des Sendens und Empfangens mit nur einer Antenne mittels eines Antennenumschalters konnte die gesamte Apparatur auf einem Fahrzeug untergebracht und die Drehung auf die Antenne beschränkt werden. Bis Kriegsbeginn 1941 wurden 15 Geräte der Einantennenvariante ausgeliefert.
Die RUS-2 ermöglichte die Entdeckung von Luftzielen in großer Entfernung und in allen damals geflogenen Höhen und die Bestimmung ihrer Entfernung und ihres Azimuts, der ungefähren Geschwindigkeit und des Bestandes von Flugzeuggruppen (auf der Grundlage der Interferenzen) sowie die Darstellung der Luftlage im Radius bis 100 km. Sie spielte eine große Rolle bei der Luftverteidigung Moskaus und Leningrads. Im Jahre 1943 erfolgte der Einbau eines Freund-Feind-Kennungsgerätes und eines Höhenmesszusatzes auf der Grundlage der Goniometermethode. 1940–1945 wurden 607 RUS-2 in verschiedenen Varianten ausgeliefert, darunter auch eine Einantennen-Variante in Transportkisten RUS-2s („Pegmatit“). Die Impulsfunkmessstation RUS-2 war Ausgangspunkt der Entwicklung mehrerer Generationen von mobilen und stationären Meterwellen-Funkmessgeräten in der Sowjetunion (P-3, P-10, P-12, P-18, P-14, Oborona-14, Njebo).
Dezimeterwellenradar für die Flak
Die erste sowjetische Dezimeterwellenanlage entstand ab 1935 unter Leitung von B.K. Schembel im Zentralen Radiolaboratorium. Zwei 2-m-Spiegel, je einer für das Senden und das Empfangen auf Wellenlängen von 21 bis 29 cm, waren nebeneinander auf einer Plattform angeordnet. Bei einer ausgestrahlten Leistung von 8 bis 15 W und einer Empfängerempfindlichkeit von 100 µV wurde ein Flugzeug in 8 km Entfernung entdeckt. Bei Erprobungen auf der Krim konnte die Reflexion von 100 km entfernten Bergen beobachtet und zur Entfernungsmessung erstmals die Frequenzmodulation angewendet werden.
Im Jahr 1937 führte man zur genaueren Bestimmung der Winkelkoordinaten das Verfahren der signalgleichen Zone mittels rotierendem Dipol ein (heute unter dem Begriff Minimumpeilung bekannt). In den folgenden Jahren wurde an der Schaffung eines Richtgeräts für die Flak in Leningrad und Charkow gearbeitet. Dabei entstand eine ganze Serie verschiedener Magnetrons für den Dezimeter- und Zentimeterwellenbereich. 1940 erfand Degtarjow das Reflexklystron, welches im Empfänger benötigt wurde.
Die Konstruktion eines Funkmesskomplexes für die Flak wurde praktisch 1940 abgeschlossen. Der Komplex bestand aus einem Dauerstrichgerät für die Bestimmung der Winkelkoordinaten auf der Wellenlänge 15 cm mit 20 W Leistung und einem Impulsgerät zur Entfernungsmessung auf der Wellenlänge 80 cm mit 15 kW Impulsleistung. Wegen der Evakuierung des Betriebes im Herbst 1941 kam es allerdings nicht zur Aufnahme der Serienproduktion; einige Versuchsgeräte setzte man in der Luftverteidigung Moskaus und Leningrads ein.
Flugzeugradar
Das Arbeiten zur Schaffung eines Radars für Jagdflugzeuge begann 1940. Im Versuchsgerät „Gneis-1“ wurde im Sender ein Klystron mit der Wellenlänge 15–16 cm verwendet, das aber infolge der Kriegseinwirkungen nicht mehr hergestellt werden konnte. Deshalb wurde unter Leitung von W.W. Tichomirow das Funkmessgerät „Gneis-2“ zum Einsatz in zweimotorigen Flugzeugen vom Typ Pe-2 mit einem Röhrensender der Wellenlänge 1,5 m und einer Auffassungsentfernung von 4 km entwickelt. Die ersten Versuchsmuster bestanden ihre Bewährungsprobe im Dezember 1942 bei Stalingrad. Die Aufnahme in die Bewaffnung erfolgte 1943.
Nach dem Krieg bedeutete die starke Ausweitung des zivilen Luftverkehrs auch eine zunehmende Bedeutung der Luftraumüberwachung und damit verbunden eine ständige Weiterentwicklung des Bordradars. Der militärische Bereich wiederum war von dem Wettrüsten der Supermächte USA und UdSSR gekennzeichnet; damit verbunden war eine ständige Leistungssteigerung bei Kampfflugzeugen. Höhere Geschwindigkeiten, seit den 1980er Jahren auch schnelle, tieffliegende Lenkwaffen sowie Marschflugkörper verlangten nach immer leistungsfähigeren, weitreichenden und genauen Bordradar-Systemen. Auch in den Flugkörpern wurde zur Zielansteuerung zunehmend Radar eingesetzt, so erstmals bei dem Boden-Luft-Lenkflugkörper Bomarc.
Einsatzgebiete
 Rundsichtradar auf einem Schiff; Position: Elbe westlich von Hamburg
Rundsichtradar auf einem Schiff; Position: Elbe westlich von Hamburg Sea-Based X-Band Radar (SBX) (USA) das weltgrößte X-Band-Radar, hier während Modernisierungsarbeiten in Pearl Harbour im Januar 2006. Es dient ab 2007 dem US-Raketenabwehrsystem National Missile Defense und wird auf den Aleuten bei Alaska stationiert.
Sea-Based X-Band Radar (SBX) (USA) das weltgrößte X-Band-Radar, hier während Modernisierungsarbeiten in Pearl Harbour im Januar 2006. Es dient ab 2007 dem US-Raketenabwehrsystem National Missile Defense und wird auf den Aleuten bei Alaska stationiert.Radargeräte wurden für verschiedene Verwendungszwecke entwickelt:
- Rundsichtradar; Überwachung von Schiffs- und Flugverkehr (auch Frühwarnstationen, z.B. das Freya-Radar), entweder als feste Station wie beim Flugsicherungsradar oder bei der Schifffahrtsverkehrssicherung, oder mobil auf Fahr- und Flugzeugen (AWACS) sowie auf Schiffen (ARPA-Anlage).
- Radargeräte zur Zielverfolgung (Ground Control Intercept) als Radarstellung der Luftverteidigung, bodengebunden (z. B. Würzburg, Würzburg-Riese) oder an Bord von Fahr- und Flugzeugen, Schiffen und Raketen
- Bordradar auf Flugzeugen (Radarnase), um Wetterfronten zu entdecken (Wetterradar) oder andere Flugzeuge und Raketen zu entdecken (Antikollisionssysteme, Zielsuchradar)
- Bodenradar (Flugfeldüberwachungsradar) zur Überwachung der Positionen von Flug- und Fahrzeugen auf den Rollwegen eines Flughafens
- Radar zur Fernerkundung und militärischer Aufklärung, um am Boden bei schlechter Sicht Einzelheiten erkennen zu können
- Wetterradar, Erkennung und Ortung von Schlechtwetterfronten, Messung der Windgeschwindigkeit
- Artillerieradar, zur Feuerkorrektur der eigenen Artillerie und Raketen sowie der Ortung der feindlichen Artilleriestellungen
- Radar-Bewegungsmelder zur Überwachung von Gebäuden und Gelände, z. B. als Türöffner oder Lichtschalter
- Radargeräte zur Messung der Geschwindigkeit im Straßenverkehr.
- Kfz-Technik: radarbasierte Abstandshalter ACC (Adaptive Cruise Control) bzw. ADC, Kopplung mit Notbremsfunktion in PSS1 bis PSS3 (Predictive Safety System), Nahbereichsfunktionen wie Abstandswarner und automatisches Einparken (24 GHz, Kurzpuls im Bereich 350–400 Pikosekunden, sowie im 77–79-GHz-Band).
- Auch Züge messen Wegstrecke und Geschwindigkeit mit Doppler-Radargeräten (im ISM-Band um 24 GHz).
- Radarsensoren als Bewegungs- oder Füllstandsmelder
- Astronomie: Kartierung von Planeten (z. B. Venus, Mars), von der Erde aus oder von Bord einer Raumsonde, Vermessung der Bahnen von Planeten, Asteroiden und Raumsonden sowie von Weltraummüll
- Bioradar zur Detektion von lebenden Personen und deren Körperbewegung, wie beispielsweise bei Verschütteten in Lawinen, auf Distanzen von einigen Metern.
Nach dem Zweiten Weltkrieg kam auch die Lenkung radargesteuerter Waffen wie Flugabwehrraketen dazu. Außerdem wurde das Radar auch für die zivile Schiff- und Luftfahrt eingesetzt. Die heutige Passagierluftfahrt wäre ohne Luftraumüberwachung durch Radar nicht denkbar. Auch Satelliten und Weltraumschrott werden heute durch Radar überwacht.
Als die Radargeräte leistungsfähiger wurden, entdeckte auch die Wissenschaft diese Technik. Wetterradargeräte helfen in der Meteorologie oder an Bord von Flugzeugen bei der Wettervorhersage. Mittels großer Stationen können vom Boden aus Radarbilder vom Mond, der Sonne sowie einigen Planeten erzeugt werden. Umgekehrt kann auch die Erde vom Weltraum aus durch satellitengestützte Radargeräte vermessen und erforscht werden.
-

Deutsches Feuerleitradar Würzburg-Riese FuMG 65, etwa 1940–43
-

Doppler-Radarantenne für den Kfz-Einsatz
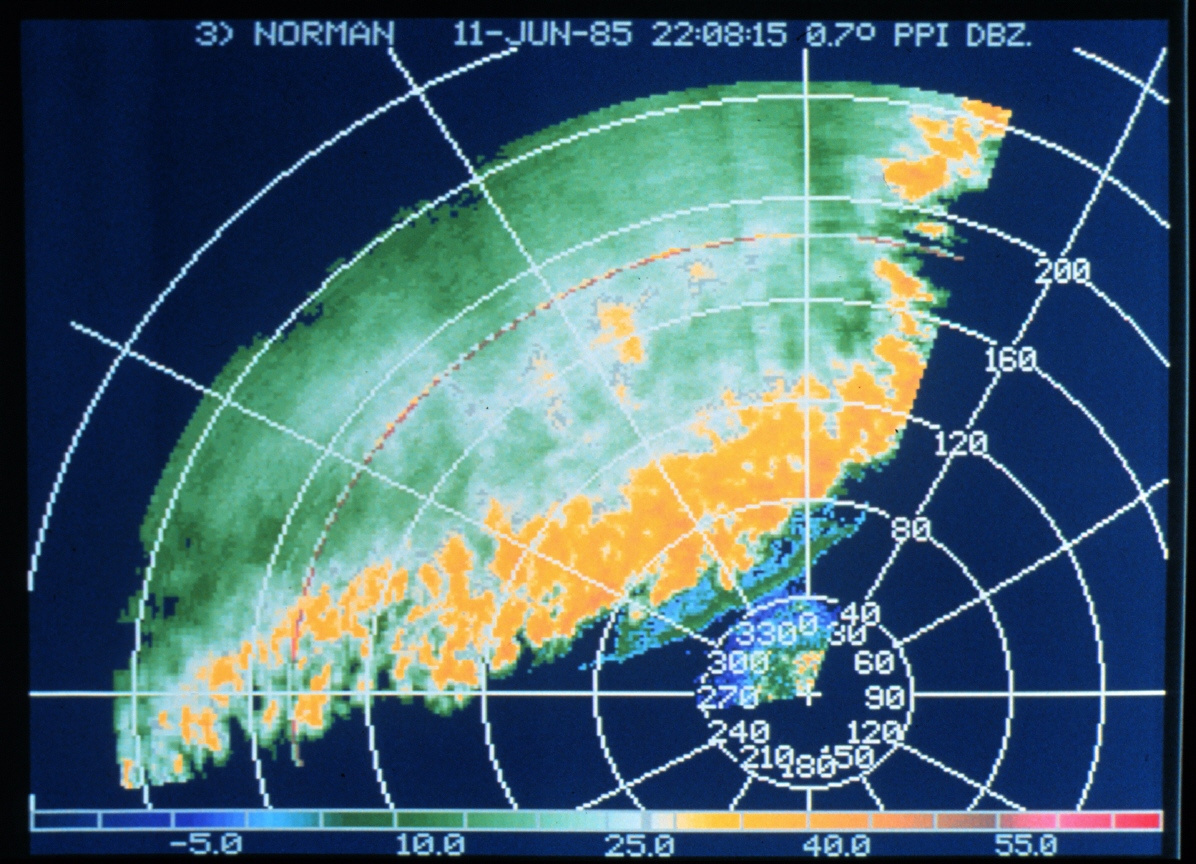
-
Sturmfront auf einem Doppler-Radar-Schirm
-

Radarturm Hooksielplate ausgerüstet mit Radar- und Peilanlage, ist Teil des Schifffahrtsverkehrssicherungs- systems Jade und Deutsche Bucht
Einteilung und Funktionsweise
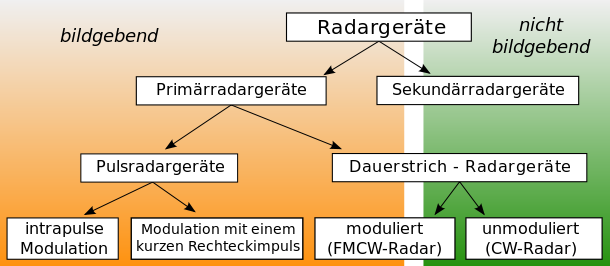

Aktive Radargeräte werden in bildgebend und nicht bildgebend eingeteilt. Ferner unterscheidet man zwischen Impuls- und CW-Radargeräten. Solche Geräte sind ihrerseits mittels Peilempfängern erkenn- und ortbar.
Als Primärradar werden Pulsradar-Geräte bezeichnet, die ausschließlich das passiv reflektierte Echo des Zieles auswerten. Es lassen sich neben der Entfernung auch die radiale Geschwindigkeit der Objekte und deren ungefähre Größe ermitteln. Auswertung reflektierter Oberwellen erlaubt Rückschlüsse auf den Flugzeugtyp.
Ein Sekundärradar umfasst ebenfalls ein Impulsradargerät, jedoch befinden sich an den Zielobjekten Transponder, die auf die Pulse reagieren und ihrerseits ein Signal zurücksenden. Hierdurch erhöht sich die Reichweite, die Objekte sind identifizierbar und können ggf. ihre Kennung und weitere Daten zurücksenden.
Peilempfänger, die die Quelle von Funkwellen (von Radar- und anderen Geräten und deren Störabstrahlung) zu militärischen Zwecken orten können, nennt man auch passives Radar. Ein passives Radar ist daher nicht anhand seiner Funkwellenaussendung zu entdecken.
Eine weitere Art von Radargeräten die nur schwer zu entdecken sind, ist das Rauschradar welches lange Pulse aussendet welche wie zufällige Störstrahlung aussehen.
Impulsradar
Entfernungsbestimmung mit dem Impulsverfahren
 Entfernungsbestimmung mit dem Impulsverfahren. Das Pulsradargerät sendet einen Impuls und misst die Zeit bis zum Empfang des Echos.
Entfernungsbestimmung mit dem Impulsverfahren. Das Pulsradargerät sendet einen Impuls und misst die Zeit bis zum Empfang des Echos.Ein Pulsradargerät sendet Impulse mit einer typischen Dauer im unteren Mikrosekundenbereich und wartet dann auf Echos. Die Laufzeit Δt des Impulses ist die Zeit zwischen dem Senden und dem Empfang des Echos. Sie wird zur Entfernungsbestimmung genutzt. Für die Entfernung r gilt der Zusammenhang:
Die Gruppengeschwindigkeit c ist näherungsweise gleich der Lichtgeschwindigkeit im Vakuum, da der Brechungsindex von Luft für Radiowellen sehr nahe an 1 ist. Je nach Reichweite des Radargerätes wird nach einem gesendeten Impuls einige Mikro- bis Millisekunden lang empfangen, bevor der nächste Impuls ausgesendet wird.
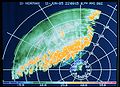
Auf dem klassischen Radarschirm beginnt die Auslenkung mit dem Sendeimpuls. Die Ausbreitungsgeschwindigkeit der elektromagnetischen Wellen im Raum ist maßstabsgerecht mit der Anzeige. Wird ein Echo empfangen, dann ist der Abstand des Echoimpulses auf dem Sichtgerät ein Maß für die Entfernung des reflektierenden Objektes (hier: des Flugzeugs) zum Radargerät.
Pulserzeugung
Um in Pulsradar-Geräten die hohen Sendeleistungen im Megawattbereich zu erzeugen, welche zur Ortung z. B. über einige 100 km nötig sind, werden auch heute Magnetrons verwendet. Dazu wird ein Magnetron z. B. mittels Trigatron, einer Hochspannungs-Schaltröhre, Thyratrons oder neuerdings auch Halbleiterschaltern gepulst betrieben.
Da sich die Sendefrequenz eines Magnetrons in Abhängigkeit von Temperatur und Betriebszustand ändern kann, wird bei Messungen der relativen Radialgeschwindigkeit die Frequenzreferenz beim Empfang aus der Sendefrequenz abgeleitet (siehe pseudokohärentes Radar).
Stationäre Pulsradargeräte erreichten Leistungen bis zu 100 MW als Spitzenimpulsleistung. Moderne Radargeräte benötigen für Reichweiten von mehreren 100 km sehr viel weniger Energie und senden teilweise Pulse mit einer Pulsleistung unter einem Megawatt. Bei der Verwendung vieler kleiner Sender kann auf strahlende Schaltröhren ganz verzichtet werden. Diese Sender erzeugen den Puls dann im Verbund. Geräte mit aktiven Phased-Array-Antennen verwenden diese Technik.
Richtungsbestimmung
Dreht man die Antenne eines Pulsradars, erhält man ein Rundsichtradar. Die scharfe Richtcharakteristik der Antenne wirkt sowohl beim Senden als auch beim Empfang. Aus der Abhängigkeit der Stärke des Echos von der Orientierung der Antenne kann sehr genau die Richtung bestimmt werden. Bekannteste Anwendungsgebiete eines solchen Rundsichtradars sind Luftraumüberwachung und Wetterradar.
Ein Flughafen-Rundsicht-Radar (ASR, Airport Surveillance Radar) kombiniert meist ein Primärradar mit einem Sekundärradar. Neben der allgemeinen Luftraumüberwachung hat es vor allem die Aufgabe dem Anfluglotsen ein genaues Bild der Luftlage rund um den Flughafen zu liefern. Die Reichweite eines ASR beträgt üblicherweise 60 sm.
Ein Anflugradar besteht aus jeweils einer waagerecht und einer senkrecht bewegten Antenne und ermöglicht, Anflugwinkel, Anflugrichtung und Anflughöhe landender Flugzeuge zu bestimmen. Der Pilot erhält die Korrekturhinweise über Funk vom Bodenpersonal oder er hat ein Anzeigeinstrument an Bord, welches Abweichungen passiv anhand der empfangenen Radarimpulse angibt. Solche Instrumentenlandungen oder Blindlandungen sind besonders bei schlechter Sicht oder bei aus militärischen Gründen unbefeuerter oder getarnter Landebahn von Bedeutung. Kurz vor dem Aufsetzen ist jedoch Bodensicht erforderlich.
Das bodengestützte STCA-System (Short Term Conflict Alert) zur Kollisionsvermeidung verwendet das Luftraumüberwachungsradar. Es berechnet aus der Flugspur (Track) von Luftfahrzeugen die Wahrscheinlichkeit eines nahen Vorbeifluges (near miss) oder gar Zusammenstoßes und warnt optisch und akustisch den Fluglotsen.
Das Schwenken des Abtaststrahles eines Impulsradars kann statt durch die Ausrichtung der Antenne auch elektronisch durch phasengesteuerte Antennenarrays bewirkt werden. Damit können in schnellem Wechsel mehrere Objekte angepeilt und quasi simultan verfolgt werden.
Das Synthetic Aperture Radar erreicht eine hohe, entfernungsunabhängige Auflösung in Azimuth. Die erforderliche Aperturgröße wird rechnerisch aus der realen Apertur einer kleinen, bewegten Antenne zusammengesetzt. Dazu muss die Bewegung der Antenne relativ zu dem beobachteten (starren) Objekt genau bekannt und die Phase der ausgesendeten Impulse kohärent zueinander sein. Erdsatelliten und Raumsonden verwenden solche Systeme zur Vermessung von Geländeprofilen.
Radarbaugruppen im Impulsradar
Radarantennen
 Älteres Impulsmagnetron eines Radarsenders (ca. 9 GHz, 7 kW, Impulsdauer 0,1 bis 1 µs), links unten isolierter Heiz- und Kathodenanschluss, rechts oben Hohlleiterflansch
Älteres Impulsmagnetron eines Radarsenders (ca. 9 GHz, 7 kW, Impulsdauer 0,1 bis 1 µs), links unten isolierter Heiz- und Kathodenanschluss, rechts oben Hohlleiterflansch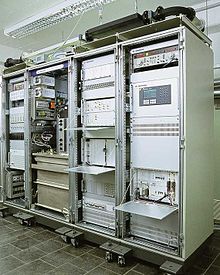 der Sender (PAT-Konzept), die Empfänger und Signalprozessor des polarimetrischen Wetterradars „Meteor 1500 S“
der Sender (PAT-Konzept), die Empfänger und Signalprozessor des polarimetrischen Wetterradars „Meteor 1500 S“Die Antenne ist eines der auffälligsten Teile der Radaranlage. Die Antenne sichert durch das Antennendiagramm und ggf. eine Drehbewegung die erforderliche Verteilung der Sendeleistung im Raum. Die Antenne wird meist im Zeitmultiplexbetrieb verwendet. Während der Empfangszeit empfängt sie dann die reflektierte Energie.
Das Antennendiagramm muss sehr stark bündeln, damit ein gutes laterales und vertikales Auflösungsvermögen erreicht wird. Das Entfernungs-Auflösungsvermögen wird dagegen durch die Impulsdauer bestimmt. Im Falle einer mechanischen Raumabtastung wird die Antenne gedreht oder hin- und hergeschwenkt. Diese Bewegung kann ein erhebliches mechanisches Problem bereiten, weil die Antennenreflektoren bei großen Wellenlängen bzw. hoher Bündelung sehr große Dimensionen erreichen. Bei Radargeräten sind folgende Antennenbauformen üblich:
- Phased-Array-Antennen (siehe auch Gruppenantenne, Panelantenne)
- Active Electronically Scanned Array, wie vor, jedoch mit elektronischer Ansteuerung der Einzelelemente, elektronische Strahlschwenkung, Zielverfolgung
- Parabolantennen
Modernere Radargeräte mit Multifunktionseigenschaften verwenden immer eine Phased-Array-Antenne, ältere Gerätesysteme meist die Parabolantenne, die zur Erzeugung eines Cosecans²-Diagramms von der idealen Parabolform abweicht.
Radarsender
Eine in älteren Radargeräten, jedoch auch heute verwendete[4] Senderbauart sind selbstschwingende Impuls-Oszillatoren, die aus einem Magnetron bestehen. Das Magnetron wird durch einen Hochspannungsimpuls gespeist und erzeugt einen Hochfrequenz-Impuls hoher Leistung (0,1…10 µs, Leistung einige kW bis einige MW). Der Hochspannungsimpuls für das Magnetron wird durch einen Modulator (Schaltröhre oder heute auch Halbleiterschalter mit MOSFET) bereitgestellt. Dieses Sendesystem wird auch POT (Power-Oszillator-Transmitter) genannt. Radargeräte mit einem POT sind entweder nicht kohärent oder pseudokohärent.
Ein in moderneren Radargeräten verwendetes Konzept ist der PAT (Power-Amplifier-Transmitter). Bei diesem Sendersystem wird in einem Generator der fertige Sendeimpuls mit kleiner Leistung erzeugt und dann mit einem Hochleistungsverstärker (Amplitron, Klystron, Wanderfeldröhre oder Halbleiter-Sendermodulen) auf die nötige Leistung gebracht. Radargeräte mit einem PAT sind in den meisten Fällen vollkohärent und können deshalb besonders gut zur Erkennung von bewegten Objekten durch Ausnutzung der Doppler-Frequenz eingesetzt werden.
Empfänger
Der Empfänger nutzt meist die Sendeantenne und muss daher vor dem Sendeimpuls geschützt werden, Das geschieht mit Zirkulatoren, Richtkopplern und Nulloden. Der Empfang erfolgt mit dem Überlagerungsprinzip, früher wurde als Oszillator ein Reflexklystron verwendet, zur Mischung und Demodulation dienten koaxial aufgebaute, in Hohlleiter eingeschraubte Spitzendioden. Heutige Empfänger arbeiten vollständig mit Halbleitern und sind in Streifenleitertechnik aufgebaut.
Dauerstrichradar (CW-Radar)
Ein CW-Radar (CW für engl. continuous wave - Dauersender) konstanter Frequenz kann keine Entfernungen messen, aber den Azimut zu einem Ziel. Es wird zur Geschwindigkeitsmessung genutzt. Dabei wird die über eine Antenne abgestrahlte Frequenz vom Ziel (beispielsweise einem Auto) reflektiert und mit einer gewissen Doppler-Verschiebung, also geringfügig geändert, wieder empfangen. Da nur bewegte Objekte erkannt werden, fehlen störende Einflusse von Festzielen. Durch einen Vergleich der gesendeten mit der empfangenen Frequenz (Homodyne Detektion) kann die radiale Geschwindigkeitskomponente bestimmt werden, die um einen Kosinusfaktor kleiner ist als der Betrag des Geschwindigkeitsvektors.
- Geschwindigkeitssensoren nach diesem Prinzip werden an Schienenfahrzeugen eingesetzt und strahlen schräg ins Gleisbett. Die erforderlichen Sendeleistungen sind sehr gering und werden oft mit Gunn-Dioden erzeugt.
- Erste Radargeräte der Verkehrspolizei waren ebenfalls CW-Radargeräte. Da sie keine Entfernung messen konnten, arbeiteten sie noch nicht automatisch.
- Flugabwehr Radargeräte, wie das AN/MPQ-55 (CWAR), Doppler-Erfassungsradar erkennen ihr Ziel auch bei starker Düppel-Störungen.
- Radar-Bewegungsmelder arbeiten ebenfalls nach diesem Prinzip, sie müssen jedoch hierzu auch langsame Änderungen der Empfangsfeldstärke aufgrund sich ändernder Interferenzverhältnisse registrieren können.
Moduliertes Dauerstrichradar (FMCW-Radar)
Eine weiterentwickelte Art sind die FMCW (frequency modulated continuous wave) Radargeräte, auch "Modulated CW-Radar" oder FM-Radar. Sie senden mit einer sich ständig ändernden Frequenz. Die Frequenz steigt entweder linear an, um bei einer bestimmten Frequenz abrupt auf den Anfangswert wieder abzufallen (Sägezahnmuster), oder sie steigt und fällt abwechselnd mit konstanter Änderungsgeschwindigkeit. Durch die lineare Änderung der Frequenz und durch das stetige Senden ist es möglich, neben der Differenzgeschwindigkeit zwischen Sender und Objekt auch gleichzeitig deren absolute Entfernung voneinander zu ermitteln. „Radar-Fallen“ der Verkehrspolizei arbeiten auf diese Weise und lösen bei Geschwindigkeitsüberschreitung bei einer bestimmten Entfernung zum Ziel den Fotoblitz aus. Radar-Höhenmesser von Flugzeugen und Abstandswarngeräte in Autos arbeiten nach diesem Prinzip. Neuerdings wird diese Technologie auch erstmalig im Sportbootbereich eingesetzt. Die Firma Navico vertreibt diese Geräte unter der Bezeichnung „Broadband Radar“.[5]. Eine zweckentfremdete Nutzung dieses „Broadband Radar“ auf Flugplätzen ist nicht möglich, da die Dopplerfrequenz von Flugzeugen zu groß ist und dadurch wesentliche Messfehler von bis zu mehreren Kilometern entstehen.
Gesundheitsschäden durch Radar
Die in den Schaltröhren militärischer Radaranlagen entstehende Röntgenstrahlung war bis mindestens in die 1980er Jahre häufig unzureichend abgeschirmt. Darüber hinaus mussten Wartungs- und Justierarbeiten oft am geöffneten Gerät durchgeführt werden. Dies führte zu Strahlenschäden bei vielen Bedienungs- und Wartungssoldaten bei der NVA und der Bundeswehr. Eine große Zahl von Soldaten, vor allem ehemalige Radartechniker, erkrankte dadurch später an Krebs, viele sind bereits in relativ jungem Alter verstorben. Die Zahl der Geschädigten (Radaropfer) beträgt mehrere Tausend. Grundsätzlich wurde der Zusammenhang von der Bundeswehr anerkannt und in vielen Fällen eine Zusatzrente gezahlt.
Die deutschen HPIR High Power Illuminating Radar des Waffensystem MIM-23 Hawk wurden deshalb mit einer zusätzlichen, gelben Rundumkennleuchte versehen, die bei aktivem Sender leuchtete.
Siehe auch
 Portal:Radartechnik – Übersicht zu Wikipedia-Inhalten zum Thema Radartechnik
Portal:Radartechnik – Übersicht zu Wikipedia-Inhalten zum Thema Radartechnik
Literatur / Referenzen
- David K. Barton (Hrsg.): Radar evaluation handbook. Artech House, Boston MA u. a. 1991, ISBN 0-89006-488-1, (Artech House radar library).
- Cajus Bekker: Augen durch Nacht und Nebel. Die Radarstory. 2. verbesserte Auflage. Stalling Verlag, Oldenburg u. a. 1964.
- Robert Buderi: The Invention that Changed the World. How a Small Group of Radar Pioneers Won the Second World War and Launched a Technological Revolution. Simon & Schuster Ltd., New York NY 1996, ISBN 0-684-81021-2, (Sloan technology series).
- Brian Johnson: Streng geheim. Wissenschaft und Technik im Zweiten Weltkrieg. Geheime Archive erstmals ausgewertet. Sonderausgabe. Weltbild, Augsburg 1994, ISBN 3-89350-818-x.
- Ulrich Kern: Die Entstehung des Radarverfahrens. Zur Geschichte der Radartechnik bis 1945. Dissertation, Stuttgart 1984.
- Guy Kouemou (Hrsg.): Radar Technology. InTech, 2010, ISBN 978-953-307-029-2, ([2]).
- Harry von Kroge: GEMA-Berlin. Geburtsstätte der deutschen aktiven Wasserschall- und Funkortungstechnik. Eigenverlag, Hamburg 1998, ISBN 3-00-002865-X.
- M. M. Lobanow: Die Anfänge der sowjetischen Funkmesstechnik. Verlag Sowjetskoje Radio, Moskau 1975, (ru).
- Albrecht Ludloff: Praxiswissen Radar und Radarsignalverarbeitung. 3. überarbeitete und erweiterte Auflage. Vieweg Verlag, Braunschweig u. a. 2002, ISBN 3-528-26568-X, (Viewegs Fachbücher der Technik).
- Albrecht Ludloff: Praxiswissen Radar und Radarsignalverarbeitung. 4. überarbeitete und erweiterte Auflage. Vieweg Verlag, Braunschweig u. a. 2008, ISBN 978-3-8348-0597-3, (Praxis : Informations- und Kommunikationstechnik).
- David Pritchard: Durch Raum und Zeit. Radarentwicklung und -einsatz 1904–1945. Stuttgart 1992.
- Frank Reuter: Funkmeß. Die Entwicklung und der Einsatz des RADAR-Verfahrens in Deutschland bis zum Ende des Zweiten Weltkriegs. Westdeutscher Verlag, Opladen 1971, (Wissenschaftliche Abhandlungen der Arbeitsgemeinschaft für Forschung des Landes Nordrhein-Westfalen 42, ISSN 0570-5665).
- Harald Rockstuhl: Sowjetische Radarstation bei Eigenrieden im Hainich in Thüringen 1983–1995. Rockstuhl, Bad Langensalza 2006, ISBN 3-937135-79-0.
- Albert Sammt: Mein Leben für den Zeppelin. 2. Auflage. Mit einem Beitrag von Ernst Breuning. Bearbeitet und ergänzt von Wolfgang von Zeppelin und Peter Kleinhans. Pestalozzi Kinderdorf, Wahlwies 1989, ISBN 3-921583-02-0.
- J. D. Schirman u. a.: Theoretische Grundlagen der Funkortung. Militärverlag der DDR, Berlin 1977.
- Merill I. Skolnik (Hrsg.): Radar Handbook. 3. Auflage. Mcgraw-Hill Professional, New York NY u. a. 2008, ISBN 978-0-0714-8547-0.
- Fritz Trenkle: Die deutschen Funkmessverfahren bis 1945. Hüthig, Heidelberg 1987, ISBN 3-7785-1400-8.
Weblinks
 Wiktionary: Radar – Bedeutungserklärungen, Wortherkunft, Synonyme, Übersetzungen
Wiktionary: Radar – Bedeutungserklärungen, Wortherkunft, Synonyme, Übersetzungen Commons: Radar – Album mit Bildern und/oder Videos und Audiodateien
Commons: Radar – Album mit Bildern und/oder Videos und Audiodateien- Sehr gute Radargrundlagen.
- Forschungsinstitut für Hochfrequenzphysik und Radartechnik (FGAN-FHR).
- Großradaranlage TIRA (Tracking and Imaging Radar) des FGAN-FHR .
- Christian Hülsmeyer and about the early days of radar inventions (englisch, PDF; 1,64 MB).
- Zur 100-jährigen Geschichte des Radars.
- ZDF-Dokumentation über den Wettlauf der Radarentwicklung auf deutscher und englischer Seite.
- Website über die Chain Home (englisch).
- Radargeschichte als Präsentation auf math.la.asu.edu (englisch, PDF; 4,53 MB).
Einzelnachweise
- ↑ Patent DE165546: Verfahren, um metallische Gegenstände mittels elektrischer Wellen einem Beobachter zu melden. Angemeldet am 30. April 1904, veröffentlicht am 21. November 1905.
- ↑ Patent DE169154: Verfahren zur Bestimmung der Entfernung von metallischen Gegenständen (Schiffen o. dgl.), deren Gegenwart durch das Verfahren nach Patent 165546 festgestellt wird. Angemeldet am 11. November 1904, veröffentlicht am 2. April 1906.
- ↑ http://www.uboat.net/allies/aircraft/wellington.htm
- ↑ Funknavigation - Radar gestern und heute
- ↑ [1]
Kategorien:- Radar
- Dimensionale Messtechnik











Wikimedia Foundation.