- Kontaktgeometrie
-
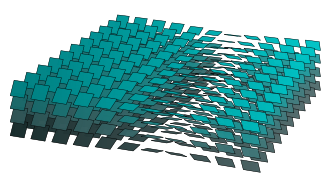
Das mathematische Gebiet der Kontaktgeometrie ist ein Teilgebiet der Differentialgeometrie, das sich mit bestimmten geometrischen Strukturen auf differenzierbaren Mannigfaltigkeiten befasst, nämlich mit vollständig nicht-integrierbaren Feldern von Hyperebenen im Tangentialbündel, sogenannten Kontaktstrukturen. Die derart beschriebene geometrische Idee ist recht einfach: Für jeden Punkt der Mannigfaltigkeit wird eine Ebene ausgewählt, wobei eine Zusatzbedingung den Spezialfall ausschließt, dass die Ebenen in Schichten liegen, wie sie im zweiten Bild dargestellt sind.
Ihren Ursprung hat die Kontaktgeometrie unter anderem in der geometrischen Optik und der Thermodynamik. Der norwegische Mathematiker Sophus Lie hat Ende des 19. Jahrhunderts ausführlich sogenannte Berührungstransformationen beschrieben[1], unter anderem, um Differentialgleichungen und Methoden wie die Legendre-Transformation und die kanonische Transformation der klassischen Mechanik zu studieren. Berührungstransformationen waren für das Gebiet namensgebend; in heutiger Sprache sind sie Abbildungen, welche Kontaktstrukturen erhalten, und heißen Kontaktomorphismen.
Heute werden Kontaktstrukturen wegen ihrer vielfältigen topologischen Eigenschaften und ihrer zahlreichen Verbindungen mit anderen Gebieten der Mathematik und Physik studiert, wie der symplektischen und der komplexen Geometrie, der Theorie der Blätterungen von Kodimension 1, dynamischen Systemen und der Knotentheorie. Besonders eng ist die Beziehung zur symplektischen Geometrie, denn in vielerlei Hinsicht sind Kontaktstrukturen, die in ungeraden Dimensionen existieren, Gegenstücke zu den symplektischen Strukturen in gerader Dimension.
 Ein Ebenenfeld auf
Ein Ebenenfeld auf , das eine Kontaktstruktur ist
, das eine Kontaktstruktur istInhaltsverzeichnis
Geometrische Idee
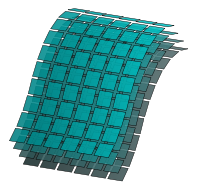 Ein Ebenenfeld auf, das von einer Blätterung stammt
Ein Ebenenfeld auf, das von einer Blätterung stammtDie nebenstehenden Bilder stellen Ausschnitte aus Ebenenverteilungen auf
dar, das heißt, dass pro Punkt im dreidimensionalen Raum eine Ebene ausgewählt ist, von der jeweils ein kleines Stück gezeichnet wurde. Im unteren Bild passen die ausgewählten Ebenen so zusammen, dass sie überall als Tangentialebenen an eine Blätterung interpretiert werden können; solche Verteilungen heißen integrierbar. Im oberen Bild hingegen ist dies nicht der Fall, und das sogar in keinem einzigen Punkt. Eine Ebenenverteilung mit dieser Eigenschaft heißt vollständig nicht-integrierbar oder maximal nicht-integrabel und definiert eine Kontaktstruktur.Tatsächlich sieht jede Kontaktstruktur im Kleinen ungefähr wie die im Bild dargestellte aus; dies ist die Aussage des weiter unten dargestellten Satzes von Darboux. Die Kontaktgeometrie stellt sich deshalb die Frage, wie Kontaktstrukturen auf verschiedenen Mannigfaltigkeiten im Großen aussehen können und welche Eigenschaften sie haben.
Definitionen
Eine Kontaktstruktur auf einer Mannigfaltigkeit M ist durch ein Feld ξ von Hyperebenen gegeben, also für jeden Punkt p von M die Angabe einer Hyperebene im Tangentialraum TpM, wobei dieses Feld vollständig nicht-integrierbar sein muss. Der Satz von Frobenius besagt, wann eine Ebenenverteilung wie ξ integrierbar ist, eine Kontaktstruktur ist also eine Ebenenverteilung, die in keinem Punkt die Bedingungen dieses Satzes erfüllt.
Oft ist es praktischer, nicht direkt mit Kontaktstrukturen sondern mit Kontaktformen zu arbeiten. Eine Kontaktform ist eine differenzierbare 1-Form α auf einer (2n+1)-dimensionalen Mannigfaltigkeit M, die in folgendem Sinne nirgendwo degeneriert ist:
 für alle
für alle 
wobei
das heißt, dass
 eine Volumenform ist.
eine Volumenform ist.Eine Kontaktform definiert eindeutig eine Kontaktstruktur. Der Kern ξ von α ist ein Hyperebenenfeld und die obige Bedingung bewirkt nach dem Satz von Frobenius, dass ξ eine Kontaktstruktur ist: Dieses Feld ist vollständig nicht-integrierbar.
Umgekehrt, ebenfalls nach dem Satz von Frobenius, lässt sich ein integrierbares Ebenenfeld lokal als Kern einer geschlossenen (eine Differentialform α heißt geschlossen, wenn dα = 0) 1-Form beschreiben, hingegen ist eine Kontaktstruktur ein Ebenenfeld, das sich lokal als der Kern einer Kontaktform beschreiben lässt.
Äquivalent zur Bedingung von oben kann man die Nicht-Degeneriertheit von α dadurch fordern, dass dα eine symplektische Form auf dem Hyperebenenfeld sein soll.
Namenskonventionen
Eine Mannigfaltigkeit M mit Kontaktstruktur ξ heißt Kontaktmannigfaltigkeit (M,ξ). Ein Diffeomorphismus zwischen Kontaktmannigfaltigkeiten, der verträglich mit den jeweiligen Strukturen ist, nennt man einen Kontaktomorphismus, ursprünglich bei Lie Berührungstransformation. Die beiden Kontaktmannigfaltigkeiten heißen dann kontaktomorph.
Beispiele
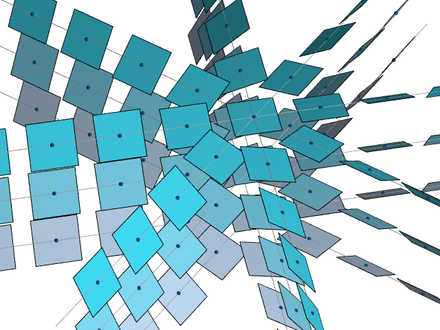 Eine Kontaktstruktur auf
Eine Kontaktstruktur auf : das Ebenenfeld
: das EbenenfeldDimension 1
In Dimension 1 stimmen die Kontaktformen genau mit den Volumenformen überein, die Kontaktstrukturen sind dementsprechend trivial.
Dimension 3
Als Grundbeispiel einer Kontaktstruktur gilt
, ausgestattet mit den Koordinaten (x,y,z) und der 1-Form- dz − ydx.
Die Kontaktebene ξ in einem Punkt (x,y,z) wird durch die Vektoren
und
aufgespannt. Diese Kontaktstruktur ist ganz oben im Artikel abgebildet.
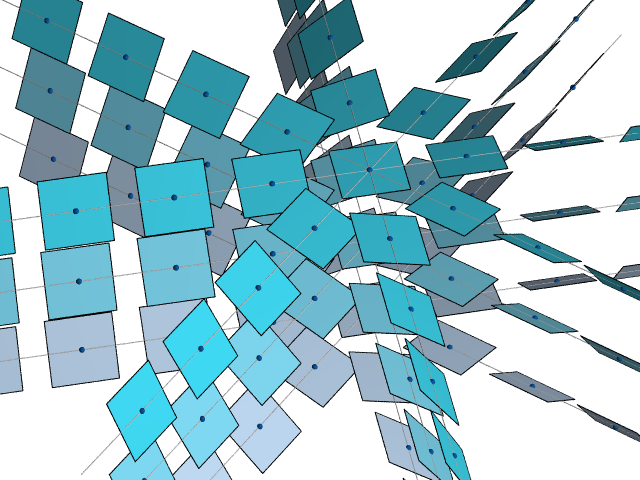
Im Bild rechts ist die Kontaktstruktur
- dz − r2dθ
dargestellt, wobei (r,θ,z) zylindrische Koordinaten für
sind.Dimension 2n+1
Das Grundbeispiel auf
lässt sich zur Standardkontaktform auf  verallgemeinern: Auf , ausgestattet mit den Koordinaten
verallgemeinern: Auf , ausgestattet mit den Koordinaten  , definieren die beiden 1-Formen
, definieren die beiden 1-Formenund
zwei zueinander kontaktomorphe Kontaktstrukturen.
Reeb-Vektorfelder
Eine Kontaktform enthält mehr Informationen als eine Kontaktstruktur, unter anderem definiert sie zusätzlich ein Reeb-Vektorfeld. Dieses Vektorfeld ist pro Punkt durch den eindeutigen Vektor R definiert, so dass
 und α(R) = 1.
und α(R) = 1.Legendre-Untermannigfaltigkeiten
Die interessantesten Untermannigfaltigkeiten einer Kontaktmannigfaltigkeit (M,ξ) sind ihre Legendre-Untermannigfaltigkeiten. Die Nicht-Integrabilität des Kontakt-Hyperebenenfeldes auf einer (2n+1)-dimensionalen Mannigfaltigkeit bedeutet, dass keine 2n-dimensionale Untermannigfaltigkeit dieses Feld als Tangentialbündel besitzt, nicht einmal lokal. Allerdings lassen sich n-dimensionale (eingebettete oder immersierte) Untermannigfaltigkeiten L finden, deren Tangentialräume im Kontaktfeld liegen, d.h.
 für alle
für alle 
Man kann zeigen, dass solche, sogenannt isotrope, Untermannigfaltigkeiten höchstens Dimension n erreichen. Eine Untermannigfaltigkeit dieser maximalen Dimension wird Legendre-Untermannigfaltigkeit genannt. Zwei solcher Untermannigfaltigkeiten heißen äquivalent, wenn sie sich durch eine Familie von Kontaktomorphismen der umgebenden Mannigfaltigkeit verbinden lassen, ausgehend von der Identität.
Betrachtet man Kontaktmannigfaltigkeiten der Dimension drei, dann bilden die zusammenhängenden kompakten Legendre-Mannigfaltigkeiten Knoten, die man Legendre-Knoten nennt. Jeder Knoten in
mit seiner Standard-Kontaktstruktur (siehe das Beispiel unten) lässt sich als Legendre-Knoten realisieren. Manchmal kann dies auf verschiedene Arten geschehen: Inäquivalente Legendre-Knoten können als gewöhnliche Knoten äquivalent sein.Aus der symplektischen Feldtheorie lassen sich Invarianten von Legendre-Untermannigfaltigkeiten gewinnen, relative Kontakthomologie genannt, die manchmal verschiedene Legendre-Untermannigfaltigkeiten unterscheiden können, welche topologisch identisch sind.
Der Satz von Darboux
Der Satz von Darboux ist ein grundlegendes Resultat der Kontaktgeometrie wie auch der noch bekannteren symplektischen Geometrie. Er ist nach Jean Gaston Darboux benannt, der damit das Pfaffsche Problem (nach Johann Friedrich Pfaff) löste. Eine der Konsequenzen des Satzes ist, dass zwei beliebige Kontaktmannigfaltigkeiten derselben Dimension immer lokal kontaktomorph sind. Es gibt also für jeden Punkt p aus M eine Umgebung U, die p enthält, und lokale Koordinaten auf U, in denen die Kontaktstruktur die oben angegebene Standardform hat.
Im Vergleich zur Riemannschen Geometrie ist dies ein starker Kontrast: Riemannsche Mannigfaltigkeiten haben interessante lokale Eigenschaften wie etwa die Krümmung. Im Gegensatz dazu gibt es im Kleinen nur ein einziges Modell von Kontaktmannigfaltigkeiten. Zum Beispiel sind die beiden beschriebenen und abgebildeten Kontaktstrukturen auf
lokal kontaktomorph und können deshalb (cum grano salis) beide Standardkontaktstruktur auf genannt werden.Literatur
- Einführende Texte zur Kontaktgeometrie
- Emmanuel Giroux: Topologie de contact en dimension 3. In: Séminaire Bourbaki. Nr. 760 (1992/93), S. 7–33 (Online).
- John Etnyre: Introductory lectures on contact geometry. In: Proc. Sympos. Pure Math.. Nr. 71, 2003, S. 81–107, arXiv:math.SG/0111118.
- Hansjörg Geiges: Contact geometry. In: Franki Dillen and Leopold Verstraelen (Hrsg.): Handbook of Differential Geometry. 2, North-Holland, Amsterdam 2006, S. 315–382, arXiv:math.SG/0307242.
- Geiges Christiaan Huygens and Contact Geometry, Nieuw Archief voor Wiskunde, Juni 2005, pdf Datei
- Geschichte
- Sophus Lie, Georg Scheffers: Geometrie der Berührungstransformationen. AMS Bookstore, 1977, ISBN 9780828402910 (Erstausgabe 1896, Eingeschränkte Vorschau in der Google Buchsuche).
- Robert Lutz: Quelques remarques historiques et prospectives sur la géométrie de contact. In: Rend. Fac. Sci. Univ. Cagliari. Conf. on Diff.Geom. and Top. (Sardinia, 1988), Nr. 58, 1988, S. 361–393.
- Hansjörg Geiges: A brief history of contact geometry and topology. In: Expo. Math.. Nr. 19, 2001, S. 25–53.
Einzelnachweise
- ↑ Sophus Lie, Georg Scheffers: Geometrie der Berührungstransformationen. B. J. Teubner, 1896 (Eingeschränkte Vorschau in der Google Buchsuche).







Wikimedia Foundation.