- Northrop Grumman RQ-4
-
Northrop Grumman RQ-4 Global Hawk 
RQ-4A „Global Hawk“ im FlugTyp: Langstreckenaufklärungsdrohne Entwurfsland:  Vereinigte Staaten
Vereinigte StaatenHersteller: Northrop Grumman Corporation Erstflug: 28. Februar 1998 Indienststellung: 26. Juni 2006 Produktionszeit: Seit 2005 in Serienproduktion Stückzahl: 25 (Stand: Ende 2008) Northrop Grumman RQ-4 Global Hawk ist eine Drohne, die von Northrop Grumman's Ryan Aeronautical Center, San Diego, Kalifornien produziert wird. Als hochfliegender Langstreckenaufklärer ersetzt es derzeit die letzten Versionen des berühmten Spionageflugzeuges U-2. In Deutschland wird sie als Unbemanntes Luftfahrzeug (engl. UAS) klassifiziert und unter dem Namen Euro Hawk eingesetzt werden. Die NATO hat sich zur Gefechtsfeldaufklärung und -überwachung, hier Alliance Ground Surveillance (AGS) genannt, ebenfalls für dieses System entschieden.
Die RQ-4B ist das bisher größte in Serie gefertigte militärische unbemannte Flugzeug der Welt.
Inhaltsverzeichnis
Beschreibung
Die RQ-4 ist ein hochfliegendes (fast 20 km Höhe), ausdauerndes (bis zu 40 h) Aufklärungsflugzeug, das autonom (unbemannt) und satellitengestützt weltweit Missionen fliegen kann (UAV: Unmanned (Uninhabited) Aerial Vehicle/Unbemanntes Luftfahrzeug). Das Fluggerät ist jedoch nicht im klassischen Sinne durch einen Joystick ferngesteuert, sondern es fliegt, nach dem Muster der Flugführung in der modernen Verkehrsfliegerei, Start, Flugweg und Landung programmiert über Computer und damit automatisch ab. Der Pilot am Boden ist über Datenfunk, direkt und über Satellit, zu jeder Zeit mit den Systemen an Bord verbunden und kann wie ein Pilot an Bord Änderungen/Umsteuerungen vornehmen. Das Fluggerät nimmt am allgemeinen Luftverkehr teil (auch bei Start und Landung), hat die entsprechenden Systeme an Bord (Transponder, TCAS) und ist nach den Bauvorschriften für Verkehrsflugzeuge ausgelegt (Festigkeit, Flugsicherheit, Redundanzen, Ausfallsicherheit etc.). Der Pilot am Boden ist über ein Relais an Bord mit dem Flugfunk verbunden und kann z. B. jederzeit mit den Fluglotsen Kontakt aufnehmen oder von ihnen Anweisungen erhalten. Eine Videokamera am Bug liefert live eine Sicht auf den Flugweg („See and Avoid“) an den Piloten am Boden. Notverfahren und Ausweichlandungen sind in den Flugführungscomputern einprogrammiert und jederzeit manuell oder automatisch ausführbar. Zum Sicherheitskonzept gehört es, dass bei Verlust der Verbindung zum Piloten das Flugzeug seinen vorgesehenen Kurs weiterfliegt und auch die Landung durchführt. Bei Ausfällen am Flugführungssystem geht das Flugzeug in vordefinierte Warteschleifen und ggf. vorgesehene Absturzräume bis zum Erhalt neuer Flugführungsbefehle. Da die Flugführung vierfach redundant ausgelegt ist, ist die Wahrscheinlichkeit eines solchen Ausfalles sehr gering.
Die Piloten für Start und Landung sind in der Regel in einer Bodenstation am Start- und Landeplatz lokalisiert. Der Pilot während der Mission kann auch in (weltweit) dislozierten Bodenstationen sitzen.
Ausgestattet mit hochauflösenden CCD-Kameras für Tages- und Nachtsicht, die auch infrarotempfindlich sind, sowie mit allwettertauglichem Seitensichtradar, kann sie aus bis zu 20.000 Metern Flughöhe jedes Objekt erkennen. In Kombination mit ihrer langen Flugdauer kann sie innerhalb von 24 Stunden ein Gebiet von der Größe Griechenlands komplett aufklären. Northrop Grumman plant ab Mitte 2011 Tests für eine autonome Luftbetankung der RQ-4, wodurch sich die Einsatzmöglichkeiten noch verbessern würden.
Um jederzeit die aktuelle Position bestimmen zu können, ist der Global Hawk mit den üblichen Navigationssystemen und Differential-GPS ausgerüstet.
Angetrieben wird das Flugzeug durch ein Turbofan-Triebwerk mit einer Ansaugöffnung oberhalb des Rumpfes, dem Rolls-Royce AE 3007H, wie es auch in den Passagierflugzeugen der Embraer-ERJ-145-Familie Verwendung findet.
Zum System gehören verschiedene Bodenstationen, das LRE (Launch and Recovery Element) und das MCE (Mission Control Element):
- Das LRE enthält die Systeme für Start und Landung, die Steuerung des Fluggerätes im Fluge und den Arbeitsplatz des Piloten, stellt also quasi das Cockpit dar. Es muss zwingend im Bereich des Start- und/ oder Landeplatzes sein, es hat nur auf ca. 250 km Reichweite mögliche Funk- und Richtfunkverbindung zum Fluggerät.
- Das MCE enthält die Systeme zur Steuerung des Missionssystems an Bord des Fluggerätes, zum Empfang und Auswertung der Daten an mehreren Arbeitsplätzen und Weiterleitung an den Nutzer. Zudem hat das MCE noch Platz und Ausrüstung für den Piloten, um das Fluggerät vom LRE nach der Startphase zu übernehmen und während des Fluges zu steuern bzw. nach Bedarf umzusteuern. Zur MCE gehört eine Parabolantenne von ca. 6 Meter Durchmesser für die satellitengestützte Kommunikation und Datenübertragung. Dadurch kann sich die MCE theoretisch und geschützt an jedem Punkt der Erde befinden. Beide Stationen sind einzeln in NATO Standard Containern mit eigener Stromversorgung und Klimatisierung untergebracht.
Varianten
RQ-4A
Die RQ-4A ist die Initialversion der Global Hawk, welche auch unter der Kennung „Block 10“ geführt werden. Der erste von sieben Prototypen absolvierte seinen Jungfernflug am 28. Februar 1998. Northrop Grumman entwickelte die Maschinen aufgrund des „Advanced Concept Technology Demonstration“-Programms (ACTD), das von der Defense Advanced Research Projects Agency (DARPA) initiiert wurde. Ziel des ACTD-Programms war es, für die veralteten U-2 Spionageflugzeuge einen Ersatz zu entwickeln, der über eine deutlich höhere Einsatzdauer verfügt. Des Weiteren sollte das neue Muster Echtzeit-Aufklärungskapazitäten zur Verfügung stellen. Im Auswahlverfahren des ACTD-Programms setzte sich die Global Hawk 1999 gegen das Konkurrenzmodell RQ-3 Dark Star von AAI Corporation durch. Der dritte Prototyp (Kennung: S/N 98-2003) stellte frühzeitig die hohe Einsatzdauer unter Beweis, als dieser am 21. März 2001 einen 30 Stunden und 24 Minuten andauernden Flug absolvierte und damit einen neuen Weltrekord für UAVs erreichte. Dabei wurde auch ein neuer Weltrekord für die größte Flughöhe für UAVs mit 19.928 m aufgestellt, der allerdings schon am 23. August des selben Jahres vom Helios-Solarflugzeug der NASA eingestellt worden ist.
Die US-Luftwaffe setzte die Global Hawk erstmals im Afghanistan-Krieg ein, obwohl sie zu diesem Zeitpunkt noch nicht offiziell in Dienst gestellt worden war. Dabei traten Probleme mit der Datenverbindung auf, welche die Einsatzfähigkeit minderten und immer wieder zu Beinaheabstürzen führte. Letztendlich ging am 30. Dezember 2001 eine Maschine über Afghanistan verloren, eine zweite stürzte am 10. Juli 2002 über Pakistan als Folge von Triebwerksproblemen ab.
Trotz der Verluste und technischen Schwierigkeiten stellte die RQ-4 die Vorteile der Echtzeitaufklärung unter Beweis. Da die deutlich kostengünstigere RQ-1 Predator ebenfalls Echtzeitaufklärung liefern konnte bzw. kann und dort weniger technische Probleme auftraten, stand zeitweise ein Abbruch des ACTD-Programms im Raum. Da die Global Hawk aber eine höhere Leistungsfähigkeit auswies, besonders in den Bereichen Einsatzdauer und Flugleistungen, wurden schließlich neun weitere Maschinen bestellt. Diese wurden allerdings in einer niedrigereren Produktionsgeschwindigkeit hergestellt, um technische Anpassungen zu vereinfachen und um Kosten zu sparen. Zwei der neuen Maschinen wurden der US-Marine übergeben, zwei weitere setzte die US-Luftwaffe im Irakkrieg ein. Dabei zeigte sich, dass die technischen Anpassungen die Zuverlässigkeit der Global Hawk verbessert haben. Allerdings wurde auch deutlich, dass das Potential des Muster mit der Block 10 Version nicht voll genutzt werden kann, da die Zuladung zu gering war. Um den Bedarf nach mehr und leistungsfähigeren Aufklärungssystemen zu decken, würde ein größeres Muster benötigt werden, was zur Entwicklung der RQ-4B Block 20 führte.
Insgesamt sind 16 Global Hawks der Block-10-Version für die US-Luftwaffe hergestellt worden, welche offiziell erst am 26. Juli 2006 in Dienst gestellt wurden. Gleichzeitig wurden damit auch ihre finalen Spezifikationen festgelegt. Ursprünglich war die Anschaffung von 59 Mustern der RQ-4A Variante geplant, allerdings wurde frühzeitig die Produktion auf die leistungsstärkere RQ-4B Variante umgestellt. In Dienst gestellt wurden lediglich sieben RQ-4A Maschinen.[1]
Im Dezember 2007 erhielt die NASA zwei RQ-4A Global Hawks zur Forschungszwecke von der US-Luftwaffe. Beide Muster, wobei es sich um die erste und sechste Maschine des ACTD-Programms handelte, sind auf dem Dryden Flight Research Center der Edwards Air Force Base stationiert. Später kam eine dritte Maschine dazu, die ebenfalls für wissenschaftliche Langzeit-Missionen in großen Höhen, wie der z.B. GloPac(Global Hawk Pacific) und WISPAR(Winter Storms and Pacific Atmospheric Rivers) von NASA und NOAA eingesetzt werden.[2][3][4] Die sieben USAF-Exemplare wurden lediglich bis Mai 2011 betrieben und nach 2.141 Missionen und knapp 36.000 Flugstunden aus dem Flugbetrieb genommen. Drei Maschinen erhielt (Stand September 2011) die US Navy zur Vorbereitung ihres Broad Area Maritime Surveillance Demonstration (BAMS-D) Programms (siehe MQ-4C), auch erste Museen sollen Block-10-Exemplare erhalten.
RQ-4B
Block 20
 RQ-4B Global Hawk der Block 20 Konfiguration im Flug
RQ-4B Global Hawk der Block 20 Konfiguration im Flug
Die RQ-4B ist eine vergrößerte Version der A-Variante. Die Spannweite wurde erhöht, um die Tragfähigkeit zu erhöhen und somit leistungsfähigere Aufklärungssysteme mitführen zu können. Deshalb ist auch die Rumpflänge erhöht worden, um mehr Platz für Sensoren und Avionik zu haben. Die größeren Abmessungen gehen teilweise zu Lasten der maximalen Flugreichweite. Die erste RQ-4B der Version Block 20 wurde am 25. August 2006 vorgestellt und hatte ihren Erstflug am 1. März 2007. Seit 2008 ist die Produktion der RQ-4 auf die Block 20 Variante umgestellt.
Bis Ende 2009 hatte die US-Airforce insgesamt drei RQ-4B Block 20 Maschinen offiziell in Dienst gestellt.[1]
Block 30
Die Block 30 Version verwendet die Flugzelle der Block 20 Variante, weshalb die Maschinen sich äußerlich nicht unterscheiden lassen. Northrop Grumman begann mit den Arbeiten an der Block 30 Version im Juni 2006, noch bevor der erste Block 20 Prototyp vorgestellt wurde. Primäre Neuerung gegenüber der Block 20 Version ist der Einbau der Upgrades „Enhanced Imagery Sensor Suite“ (EISS) und „Airborne Signals Intelligence Payload“ (ASIP), welches der Global Hawk ermöglicht, SIGINT-Aufgaben zu übernehmen, genau wie es beim Euro Hawk der Fall ist. Ursprünglich wurde die erste Maschine der Version Block 30 für 2010 erwartet, infolge technischer Probleme wurden bis zum Sommer 2011 nur vier Vorserienprototypen hergestellt. Im „Operational Test and Evaluation“-Report (OT&E) vom 27. Mai 2011 werden die Block 30 Prototypen als ineffizient bezeichnet, da sie bis dahin nur 27% ihres geplanten Aufgabenspektrums erfüllen konnten.[5] Deshalb wurde sogar kurzzeitig erwogen, auf die Block-30-Version komplett zu verzichten und stattdessen die Produktion direkt auf die Block-40-Variante umzustellen. Letztlich entschloss man sich im Juni 2011 anstatt vormals geplanten 44 nur noch 31 Exemplare zu beschaffen.
Block 40
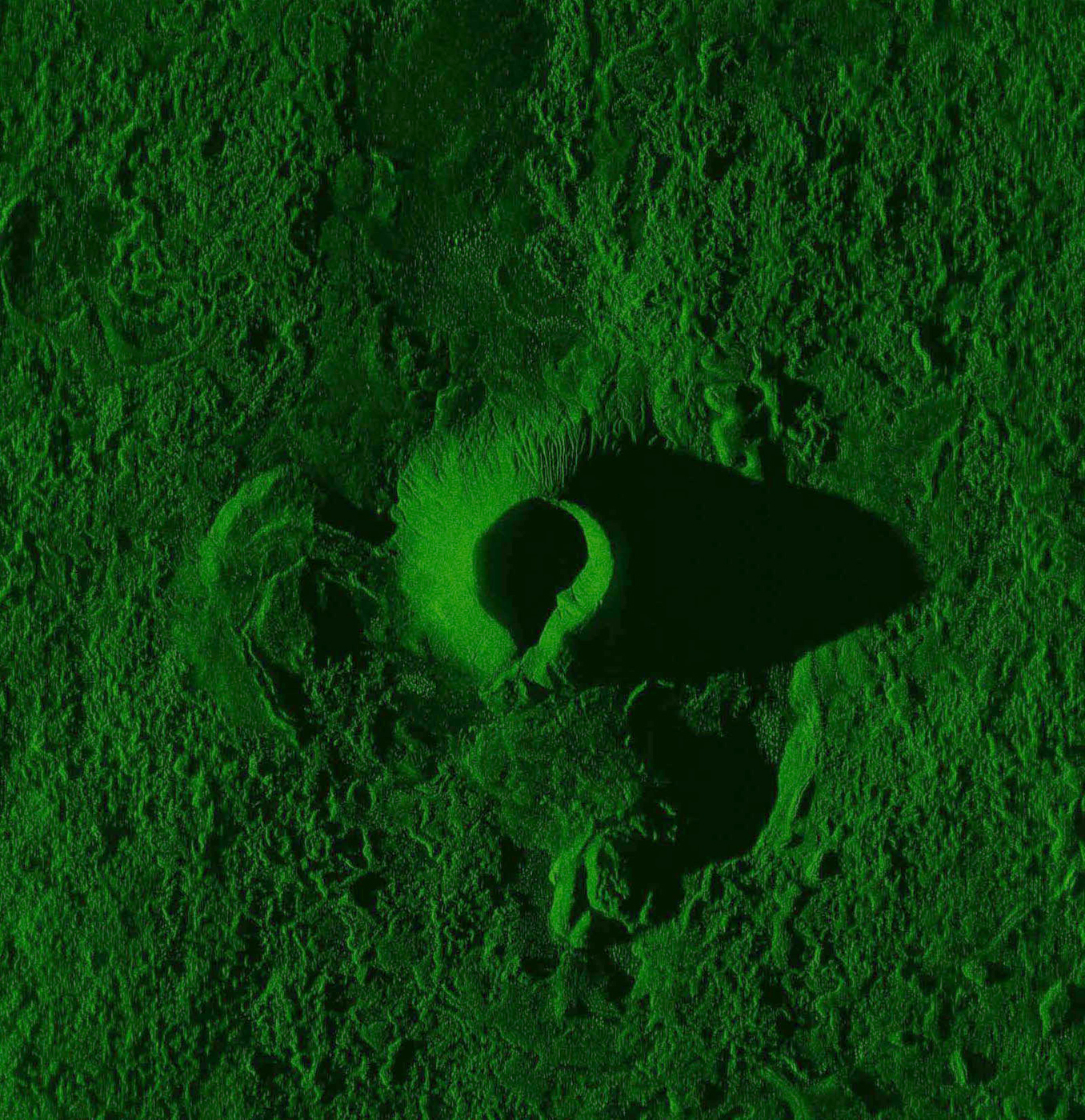
 Radarbild eines Vulkankraters aufgenommen von einer Global Hawk in der Block 40 Version
Radarbild eines Vulkankraters aufgenommen von einer Global Hawk in der Block 40 VersionDie erste offizielle Vorstellung der Block 40 Variante erfolgte am 25. Juni 2009 bei Northrop Grumman. Sie verfügt über das neue AESA-Seitensichtradar MP-RTIP (Multi-Platform Radar Technology Insertion Program), mit dem auch hochauflösende Radarkarten erstellt werden können.[6] Sie ist an der langen Verkleidung unter dem Rumpf für die 1,20 × 0,45 m große Antenne zu erkennen.
Der erste Prototyp der RQ-4B Block 40 Version absolvierte seinen Jungfernflug am 16. November 2009.[7] Ursprünglich bestellte die U.S. Air Force 22 Block-40-Maschinen, allerdings wurde die Zahl im Februar 2011 vorläufig auf 11 reduziert, um mit den freiwerdenen Finanzmitteln die Probleme bei der Block-30-Version beheben zu können.[5]
MQ-4C
Die MQ-4C ist eine in der Entwicklung befindliche Version der RQ-4B zur Seeüberwachung für die US-Marine im Rahmen des „Maritime Surveillance“-Programms. Diese Variante wurde ursprünglich als RQ-4N bezeichnet und im September 2010 in MQ-4C umbenannt.[8]
Die Ursprünge der MQ-4C gehen auf Testflüge zurück, welche die US-Marine mit zwei Block 10 Global Hawks der US-Luftwaffe durchgeführt hat. Die Maschinen trugen während der Testflüge die Kennung N-1. Nachdem die grundsätzliche Eignung der RQ-4 für die Seeraumüberwachung bewiesen werden konnte, begann Northrop Grumman mit dem „Global Hawk Maritime Demonstration“-Programm (GHMD). Dieses diente zur Anpassung der Global Hawk ans „Maritime Surveillance“-Programm, wobei es sich um eine Neustrukturierung der Seeaufklärung der USA handelt, und wurde ab dem 28. März 2006 auf der Naval Air Station Patuxent River durchgeführt.
Am 28. April 2008 erhielt Northrop Grumman den Zuschlag im „Maritime Surveillance“-Programm und wurde mit der Lieferung von 68 Maschinen für die US-Marine beauftragt. Der Vertrag zur MQ-4C, welcher erst im August 2008 geschlossen worden ist, umfasst ein Gesamtvolumen von 1,16 Mrd. US-$. Die RQ-4N hatte sich in dem dreijährigen Auswahlverfahren gegen die Konkurrenzmuster MQ-1C Sky Warrior und MQ-9N Mariner durchgesetzt und stellt zusammen mit der P-8 Poseidon das Grundelement des „Maritime Surveillance“-Programms dar. Ausschlag gebend für die MQ-4C war ihre deutlich höhere Einsatzdauer gegenüber den Konkurrenzmodellen.
RQ-4E Euro Hawk
 Die erste Eurohawk Drohne für die Bundeswehr im Hangar von EADS/Cassidian (Oktober 2011)
Die erste Eurohawk Drohne für die Bundeswehr im Hangar von EADS/Cassidian (Oktober 2011) Euro-Hawk-Attrappe auf der ILA 2006
Euro-Hawk-Attrappe auf der ILA 2006Bei der RQ-4E Euro Hawk handelt es sich um eine Variante der RQ-4B (Block 20) für die Bundeswehr, dessen Sensorik von EADS stammt. Dabei wird die RQ-4E komplette SIGINT-Aufgaben übernehmen. Die Drohne wird mit ihren Aufklärungs- und Überwachungsfähigkeiten das Flugzeugmuster Breguet Atlantic BR-1150M in Deutschland ersetzen. Die Planungsarbeiten hierzu wurden im Januar 2000 bei der Friedrichshafener Dornier GmbH begonnen, damals noch selbständig innerhalb der EADS, als sich Projekte mit bemannten Aufklärungsflugzeugen als zu teuer und auch bereits als technisch überholt erwiesen hatten.
Zum Jahresende 2002 fanden auf dem amerikanischen Edwards-Luftwaffenstützpunkt (in Kalifornien) erste Flugversuche statt, bei dem ELINT-Aufklärungssensoren der EADS aus Ulm an Bord einer RQ-4A Global Hawk mitgeführt und bereits funktional getestet wurden. Dabei wurde auch der Datenversand von der Drohne zu einer Bodenstation über Direktverbindung getestet. Dieser Test gilt als Erstflug im Euro-Hawk-Programm.
Ab dem 21. Oktober 2003 führten die US-Luftwaffe, die Bundeswehr und die Herstellerfirmen Northrop Grumman und Dornier/EADS innerhalb zwei Wochen sechs Testflüge mit dem Prototyp 01 der RQ-4A und dem EADS-Sensor unter operationellen Bedingungen durch. Die Drohne war zuvor in einem 20stündigen Flug nonstop von der Edwards Air Force Base in Kalifornien nach Nordholz geflogen und gelandet. Dort beim Marinefliegergeschwader 3 war die komplette Infrastruktur von Bodenstationen, LRE, MCE und eine Auswertestation von EADS aufgebaut, um über der Nordsee in knapp 19.000 m Höhe verschiedene Sensortests mit zeitgleicher Übertragung und Auswertung der gesammelten Daten an die Bodenstationen zu absolvieren. Die Datenübertragung erfolgte dabei noch über eine Direktverbindung; das Fluggerät war für die Steuersignale über das Satellitensystem Inmarsat mit der Bodenstation verbunden.
Oktober/ November 2004 wurden dann die für COMINT vorgesehenen Ausrüstungskomponenten in einer Transall C-160 der WTD 61 in Manching erprobt.
Am 31. Januar 2007 haben das Bundesamt für Wehrtechnik und Beschaffung (BWB) und die in Friedrichshafen ansässige EuroHawk GmbH als auftragnehmende Agentur der Firmen EADS und Northrop Grumman einen Vertrag zur Lieferung eines Prototyps im Jahr 2010 und die Option für vier weitere Systeme in der Zeit von 2011 bis 2014 mit der EADS SIGINT-Ausrüstung geschlossen. Der Auftrag hat ein Volumen von 430 Mio Euro, andere Quellen sprechen von 1,3 Mrd. Euro [9]. Der Flugbetrieb soll durch das Aufklärungsgeschwader 51 "Immelmann" vom Fliegerhorst Jagel durchgeführt werden.
Die RQ-4E wird in Palmdale/Lancaster in Kalifornien in den Skunk Works gebaut und zur Ausrüstung ohne das SIGINT-System nach Deutschland geflogen. Die Endausrüstung, Erprobung und Übergabe an die Bundeswehr erfolgt dann am EADS-Standort Manching.
Die Strukturmontage des ersten Exemplares wurde im Juli 2009 durch Northrop Grumman abgeschlossen, woraufhin der Rollout am 8. Oktober 2009 stattfand.[10][11] Nachdem die Überführung des Flugzeuges nach Manching zur Einrüstung der Sensoren ursprünglich für Anfang 2010 vorgesehen war, erfolgte der Erstflug am 29. Juni 2010 von Palmdale zur Edwards Air Force Base.[12]Am 21. Juli 2011 traf die erste Maschine zur Einrüstung der Aufklärungselektronik in Manching ein[13][14], am 12. Oktober 2011 wurde die Aufklärungsdrohne dort der deutschen Öffentlichkeit vorgestellt. [15]
KQ-4
Bei der KQ-4 handelt es sich um eine Tankerdrohne. Für das einzige Testmuster wurde eine RQ-4A umgebaut, mit derer im Rahmen des KQ-X Programms autonome Luftbetankungen erprobt werden.[16]
Sonstiges
Zu Beginn der Nuklearkatastrophe von Fukushima im März 2011 schickten die USA eine Global Hawk-Drohne nach Japan, die Fotos und Wärmebilder von den explodierten Reaktorgebäuden 1 - 4 bzw. von deren nun sichtbarem Inneren machte und Radioaktivätsmessungen vornahm. Die US Air Force teilte mit, die Drohne sei bereits nach dem Erdbeben in Haiti 2010 eingesetzt worden und auf dem US-Luftwaffenstützpunkt Guam im Pazifik stationiert.[17]
Export
 Australien
Australien- Australien plante die Anschaffung von mindestens sechs MQ-4C, wobei diese zunächst geleast werden sollten. Die Drohnen waren als Ergänzung für die P-8A Poseidon gedacht. Nach Kostensteigerungen hat das australische Parlament die Beschaffung vorläufig gestoppt.[18]
 Deutschland
Deutschland- Die Bundeswehr schafft fünf RQ-4E Euro Hawk SIGINT-Maschinen an (siehe RQ-4E Euro Hawk).
 Indien
Indien- Die indische Marine hat Interesse an der MQ-4C geäußert, um, ähnlich wie ursprünglich Australien, diese als Ergänzung für die P-8I Poseidon zu nutzen.
 Japan
Japan- Japan möchte drei RQ-4B Maschinen kaufen, wobei die Finanzierung bisher völlig offen ist.
 Kanada
Kanada- Kanada prüft die Anschaffung der MQ-4C als Ersatz für die CP-140 Aurora.
 Spanien
Spanien- Spanien prüft ebenfalls die Anschaffung der MQ-4C zur Seeraumüberwachung. Allerdings ist es bisher zu keinem Vertragsabschluss gekommen.
 Südkorea
Südkorea- Südkorea hat die Beschaffung einiger Global Hawks in den USA angefragt und rechnet im Juni 2011 mit einem positiven Bescheid aus Washington.
Nutzer
Die folgenden Informationen entsprechen dem Planungsstand Sommer 2010 für die zukünftigen Stationierungsplätze.
Die US-amerikanischen Maschinen von US Air Force und US Navy werden, um Kosten zu senken, gemeinsam gewartet, stationiert und eingesetzt.
- Andersen Air Force Base, Guam, ab September 2010 (für den Bereich United States Pacific Command)
- Beale Air Force Base, Kalifornien, ab Ende der 1990er Jahre (9. Reconnaissance Wing mit der 12. Reconnaissance Squadron, der Wartungsstaffel und dem Trainingszentrums, für die Bereiche United States Northern Command und United States Southern Command, hinzu kommt eine Reserveeinheit, die 13. Reconnaissance Squadron des 940. Wing)
- Edwards Air Force Base, Kalifornien, ab den 1990er Jahren (53. Wing mit der 31. Test and Evaluation Squadron)
- Grand Forks Air Force Base, North Dakota, ab Juni 2011 (gleiche Kommandobereiche wie Beale, Detachment 1 des 9. Reconnaissance Wing)
- Naval Air Station Jacksonville, Florida (inklusive einer Einsatzzentrale der Navy, gleiche Kommandobereiche wie Beale)
- Naval Air Station Sigonnella, Sizilien (für die Bereiche United States European Command und United States Africa Command)
- Naval Air Station Whidbey Island, Washington (zweite Einsatzzentrale der Navy, kein Stützpunkt von Fluggeräten)
Die NASA betreibt zwei Exemplare durch das Dryden Flight Research Center, welches sich ebenfalls auf dem Gelände der Edwards AFB befindet.
Technische Daten
 RQ-4A Prototyp beim Erstflug am 28. Februar 1998
RQ-4A Prototyp beim Erstflug am 28. Februar 1998 RQ-4A beim Start von der Beale AFB
RQ-4A beim Start von der Beale AFB Global Hawk während der Wartung
Global Hawk während der WartungKenngröße Daten der RQ-4A[1][19] Daten der RQ-4B[1][19] Typ: Unbemannter hochfliegender Langstreckenaufklärer Unbemannter hochfliegender Langstreckenaufklärer Länge: 13,53 m 14,50 m Flügelspannweite: 35,42 m 39,89 m Flügelfläche: 50,10 m² k. A. Flügelstreckung: 25,04 k. A. Tragflächenbelastung: - Minimal (Leergewicht): 83 kg/m²
- Maximal (maximales Startgewicht): 232 kg/m²
k. A.
Höhe: 4,63 m 4,63 m Leergewicht: 5.148 kg 6.781 kg Maximales Startgewicht: 12.133 kg 14.628 kg Treibstoffkapazität: 6.985 l 7.847 l Höchstgeschwindigkeit: 644 km/h (auf optimaler Höhe) 637 km/h (auf optimaler Höhe) Dienstgipfelhöhe: 19.811 m 19.811 m Einsatzradius: ca. 5.500 km bei 24 stündigem Aufenthalt im Zielgebiet k. A. Maximale Flugdauer: 36 Stunden k. A. Überführungsreichweite: 25.015 km 22.780 km Besatzung: keine an Bord, ein Pilot in Bodenstation keine an Bord, ein Pilot in Bodenstation Zuladung: Aufklärungssysteme im Gesamtgewicht von 907 kg Aufklärungssysteme im Gesamtgewicht von 1.360 kg Triebwerk: ein Rolls-Royce Allison AE3007H-Mantelstromtriebwerk ein Rolls-Royce Allison AE3007H-Mantelstromtriebwerk Schubleistung: 36,8 kN 36,8 kN Literatur
- J. Chris Naftel: NASA Global Hawk: Project Overview and Future Plans. 34th International Symposium on Remote Sensing of Environment, Sydney 2011, pdf online@NTRS, abgerufen am 15. August 2011
Weblinks
 Commons: RQ-4 Global Hawk – Album mit Bildern und/oder Videos und Audiodateien
Commons: RQ-4 Global Hawk – Album mit Bildern und/oder Videos und Audiodateien- Seite des Herstellers
- Seite der EuroHawk GmbH
- Concept of Operations/ Einsatzbeschreibung
- Gesamtsystem mit Darstellung LRE und MCE
- Weitere Informationen auf der Homepage der deutschen Luftwaffe
- NASA Global Hawk 360
- Drohnen für die Klimaforschung
Einzelnachweise
- ↑ a b c d Factsheets: RQ-4 Global Hawk. U.S. Air Force, November 2009, abgerufen am 21. März 2011 (englisch).
- ↑ Global Hawk: High-altitude, long-endurance science aircraft nasa.gov, abgerufen am 14. August 2011
- ↑ GloPac - Science Overview espo.nasa.gov
- ↑ NOAA Studies Atmospheric ‘Rivers’ Using Unmanned Aircraft noaa.gov, abgerufen am 15. August 2011
- ↑ a b Pentagon: Block 30 Global Hawks not effective. International, 10. Juni 2011, abgerufen am 11. Juni 2011 (englisch).
- ↑ FliegerRevue August 2009, S.8, Neuer Global Hawk vorgestellt
- ↑ Global Hawk Block 40 im Flugtest. FlugRevue, 9. Dezember 2010, abgerufen am 21. März 2011.
- ↑ BAMS given MQ-4C designation. NAVAIR, 13. September 2010, abgerufen am 21. März 2011 (englisch).
- ↑ http://www.20min.ch/wissen/news/story/Das-neueste-Spielzeug-der-Generaele-28384011
- ↑ Erster Euro Hawk in Palmdale vorgestellt. FlugRevue, 9. Oktober 2009, abgerufen am 21. März 2011.
- ↑ Euro Hawk unveiled in USA. Global, 9. Oktober 2009, abgerufen am 21. März 2011 (englisch).
- ↑ Erfolgreicher Erstflug des Euro Hawk symbolisiert Zukunft der Luftwaffe. Luftwaffe.de, 6. Juli 2010, abgerufen am 21. März 2011.
- ↑ Augsburger Allgemeine: Euro Hawk kommt nach Manching. Abgerufen am 21. Juli 2011.
- ↑ EURO HAWK. Abgerufen am 19. Oktober 2011.
- ↑ Deutschlandfunk, Forschung Aktuell, 13. Oktober 2011, Maximilian Schönherr: Abhören von weit oben. Abgerufen am 19. Oktober 2011.
- ↑ https://www.facebook.com/video/video.php?v=207116569298500&oid=90319605974&comments
- ↑ sueddeutsche.de 17. März 2011
- ↑ Govt scraps plan for military drones. ABC News, 3. März 2009, abgerufen am 21. März 2011 (englisch).
- ↑ a b Claudio Müller: Flugzeuge der Welt 2008. Motorbuch Verlag, Stuttgart 2008, ISBN 978-3-613-02847-0.

Zivile Flugzeuge: Alpha • Beta • Gamma • Delta • G-21 • G-44 • G-63 • G-72 • G-73 • G-81 • G-164 • Gulfstream I • Gulfstream II
Jagdflugzeug: FF • XFT • F2F • F2T • F3F • F4F • XF5F • F6F • F7F • F8F • F9F • XF10F • F11F • XF12F • XP-56 • P-61 • XP-79 • F-89 • F-5 • F-9 • F-11 • F-14 • YF-17 • F-20 • YF-23
Jagd- und Torpedobomber: AF • TBF/TBM • XTB2F • YA-13 • XA-16 • A-17 • A-6 • YA-9
Bomber: YB-35 • YB-49 • B-62 • BT • B2T • B-2
Transportflugzeuge: HU-16 • YC-19 • C-100 • UC-103 • YC-125 • JF • J2F • J3F • J4F • JRF • XJR2F • RT • C-1 • C-2 • KC-45
Trainer: T-38
Seepatrouillen- und elektronische Kampfflugzeuge: SF • XSBF • E-1 • E-2 • EA-6 • EF-111 • S-2
Aufklärungsflugzeuge: F-15 • RF-61 • RF-5 • RQ-4 • RQ-5 • RQ-8/MQ-8 • OV-1
Versuchsflugzeuge und abgebrochene Projekte: All-Wing • HL-10 • N-1M • N-3PB • N-9M • Firebird • Tacit Blue • MX-324 • X-4 • X-21 • X-29 • X-47 • Nutcracker
Wikimedia Foundation.
Schlagen Sie auch in anderen Wörterbüchern nach:
Northrop Grumman — Corporation Type Public Traded as NYSE: NOC … Wikipedia
Northrop Grumman Q-5 — Northrop Grumman RQ 5 Hunter … Deutsch Wikipedia
Northrop Grumman RQ-8 — Northrop Grumman MQ 8 Fire Scout … Deutsch Wikipedia
Northrop Grumman — Corporation Tipo Pública Fundación 1927 (en 1994, la compañía adoptó su nombre actual) Sede Los Angeles, California … Wikipedia Español
Northrop Grumman — Rechtsform Corporation ISIN US6668071029 Gründung … Deutsch Wikipedia
Northrop Grumman MQ-8 — Fire Scout … Deutsch Wikipedia
Northrop Grumman X-47 — Pegasus … Deutsch Wikipedia
Northrop Grumman X-29 — Grumman X 29 Grumman X 29 в полёте Тип … Википедия
Northrop Grumman X-47 — Pegasus X 47 Pegasus … Wikipédia en Français
Northrop Grumman RQ-5 — Hunter … Deutsch Wikipedia
- Kontaktieren Sie uns: Unterstützung, Werbung
Northrop Grumman RQ-4







18+
© Academic, 2000-2026
Wörterbücher Export, schritte mit PHP, Joomla, Drupal, WordPress, MODx.