- Mars Science Laboratory
-
 Computergrafik von „Curiosity“ auf dem Mars
Computergrafik von „Curiosity“ auf dem Mars
 Das Mars Science Laboratory in seiner Gesamtheit
Das Mars Science Laboratory in seiner GesamtheitDas Mars Science Laboratory (kurz MSL) ist eine NASA-Mission zum Mars. Sie soll den Planeten dahingehend untersuchen, ob auf ihm Leben existieren kann oder früher konnte. Der Rover „Curiosity“ wird sich nach der Landung selbständig fortbewegen und wissenschaftliche Untersuchungen durchführen.
Die Technik wurde auf Basis der Erfahrungen mit den beiden Mars Exploration Rovern entwickelt und verfügt in allen Bereichen über deutlich mehr Leistung. Zusätzlich sind noch einige Innovationen eingeflossen, besonders im Bereich des Landesystems (sanftes, gezieltes Aufsetzen statt ungenauer Airbag-Crashlandung) und bei der Energieversorgung (stabile Radionuklidbatterie statt wetterabhängiger Solarzellen).
Der Start ist für den 25. November 2011 um 16:20:05 UTC vorgesehen. Die Sonde soll an Bord einer Atlas V(541) von der Cape Canaveral Air Force Station aus starten.
Technischer Überblick „Mars Science Laboratory“
Aufbau
Folgende Explosionszeichnung illustriert den Aufbau des Mars Science Laboratory und bietet einen kurzen Überblick über die Funktionen der einzelnen Komponenten.
Marschflug-
Modul
Dieses Modul steuert das Mars Science Laboratory während des Fluges von der Erde zum Mars. Außerdem enthält es Teile für die Kommunikation und für die Regelung der Temperatur. Vor dem Eintritt in die Marsatmosphäre wird das Modul von der Kapsel abgetrennt. Kapsel 
Die Kapsel enthält die Abstiegsstufe. Sie schützt diese und den Rover vor den Einflüssen des offenen Weltraums und den Belastungen während des Eintritts in die Marsatmosphäre. Am oberen Teil befindet sich ein Behälter für den Fallschirm, der den Abstieg der Kapsel verlangsamen soll. An der Fallschirmhalterung sind außerdem diverse Antennen zur Kommunikation angebracht. Abstiegsstufe 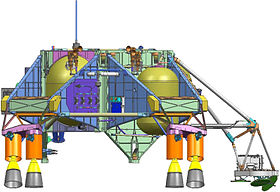
Nachdem Hitzeschild und Kapsel ihre Aufgabe erfüllt haben, werden diese abgetrennt und geben die Abstiegsstufe frei. Diese sorgt für das sanfte und präzise Aufsetzen des Rovers auf die Marsoberfläche, was durch den Einsatz eines Radars und individueller Steuertriebwerke erreicht wird. Zudem sind in der Stufe wichtige Komponenten für die Kommunikation während des Marschfluges enthalten.Rover „Curiosity“ 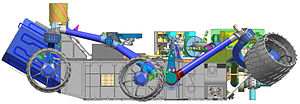
Der Rover mit dem Namen „Curiosity“ ist das Kernstück der Mission und trägt alle wissenschaftlichen Instrumente sowie wichtige Kommunikationssysteme. Während des Transports ist das Fahrwerk eingeklappt, um Platz zu sparen. Hitzeschild 
Der Hitzeschild schützt die anderen Komponenten vor den extrem hohen Temperaturen beim Eintritt in die Marsatmosphäre.
Gesamtsystem 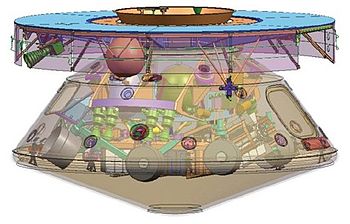
Zusammengesetzt ergibt sich die 3,4 Tonnen[1] schwere, flugbereite Konstruktion wie auf dem Bild gezeigt. Abstiegsstufe und Rover befinden sich innerhalb der Kapsel, auf der wiederum das Marschflug-Modul montiert ist. Kommunikationssystem
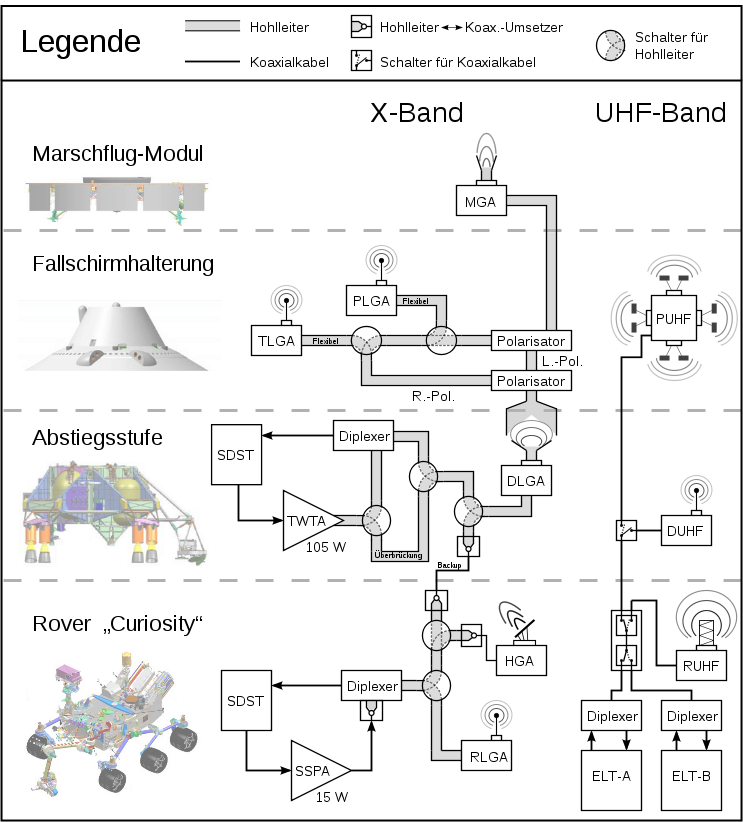
Die folgende Abbildung bietet einen Überblick über das Kommunikationssystem des Mars Science Laboratory. Die Grafik ist verweissensitiv, ein Klick auf das jeweilige Bauteil führt zum entsprechenden Abschnitt oder Artikel. Eine kurze Schnellinformation wird eingeblendet, wenn die Maus eine kurze Zeit über dem Objekt ruht.

Technik der Marschflug- und Landesysteme
Marschflug-Modul
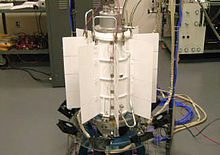
 Das Marschflug-Modul wird für einen Test vorbereitet. Man beachte die Attrappe der Kapsel unten sowie die Radiatorflächen an der Seite und die Solarzellen auf der Oberseite.
Das Marschflug-Modul wird für einen Test vorbereitet. Man beachte die Attrappe der Kapsel unten sowie die Radiatorflächen an der Seite und die Solarzellen auf der Oberseite.Das Mars Science Laboratory wird während der Wegstrecke von der Erde bis zum Mars von dem Marschflug-Modul gesteuert, das auf der Kapsel montiert ist. Die Struktur des Moduls ist generell ringförmig mit einem Durchmesser von vier Metern und weist inkl. Treibstoff eine Masse von 600 kg auf.[1] Sie besteht aus Aluminium und wird durch mehrere Verstrebungen stabilisiert. Auf der Oberfläche des Rings sind zwölf einzelne Solarzellen zur Energieversorgung angebracht, die am Ende der Mission (kurz vor dem Eintritt der Kapsel in die Marsatmosphäre) mit einer Effizienz von 28,5 % mindestens 1 kW elektrische Leistung produzieren sollen.[2] Um bei sehr energieintensiven Operationen genügend Leistung abrufen zu können, sind außerdem mehrere Lithium-Ionen-Akkumulatoren vorhanden.[3] Darüber hinaus ist das Modul auch mit den Batterien der Abstiegsstufe und dem Energieversorgungssystem von „Curiosity“ verbunden, so dass die Stromversorgung bei Problemen im Flug neu organisiert werden kann.[4]
Zur Ermittlung der Lage im Raum werden ein Sternsensor und einer von zwei Sonnensensoren eingesetzt.[5] Ersterer beobachtet mehrere dynamisch ausgewählte Leitsterne, der Sonnensensor benutzt ausschließlich die Sonne als Referenzpunkt. Das System ist redundant ausgelegt, um die Sicherheit der Mission zu erhöhen. Zur Durchführung von Bahnmanövern werden insgesamt acht Schubdüsen eingesetzt, die mit Hydrazin-Treibstoff betrieben werden.[3] Dieser befindet sich in zwei kugelförmigen Tanks aus Titan.
Da die Radionuklidbatterie von „Curiosity“ beständig große Mengen Wärme abgibt (Details siehe Energieversorgung), muss diese aus dem Inneren der Kapsel abgeführt werden, um eine Überhitzung zu vermeiden. Daher besitzt das Marschflug-Modul insgesamt zehn Radiatoren, welche die Wärme in den Weltraum abstrahlen.[3] Es handelt sich hierbei um einfache Metallflächen, die gut sichtbar an den Seiten des Moduls angebracht sind. Über eine komplexe Rohrleitung und eine Pumpe bilden sie einen Kühlmittelkreislauf mit der Radionuklidbatterie des Rovers.[3] Einige Komponenten (z. B. die Batterien und Akkumulatoren) werden auf diesem Wege auch gezielt beheizt, um sie vor Kälteschäden zu bewahren. Mehrere Temperatursensoren sorgen hierbei für die automatische Einstellung des Kühl- bzw. Heizsystems.[3]
Das Marschflug-Modul selbst enthält zwar keine eigenen Kommunikationssysteme, es besitzt allerdings die „Medium Gain Antenna“ (MGA), die an den Sende-Empfangskomplex der Abstiegsstufe über Schalter angeschlossen werden kann.[5] Über diese Hornantenne wird während des Marschfluges und der ersten Landephase ein Großteil der Kommunikation abgewickelt. Da die MGA eine mittelstark ausgeprägte Richtwirkung aufweist, muss sie zumindest grob auf die Erde ausgerichtet werden, um eine gute Verbindungsqualität zu erreichen.[5] Im Gegenzug bietet diese Eigenschaft eine höhere Datenrate bei gleicher Sendeleistung im Vergleich zu einfachen, rundstrahlenden Antennen wie z. B. der PLGA. Bei optimaler Ausrichtungen beträgt der Antennengewinn etwa 18 Dezibel, wobei entweder links- oder rechtsdrehend polarisierte Signale übertragen werden können.[5] Gesendet wird bei 8401 MHz mit einer Datenrate von bis zu 10 kBit/s, der Empfang findet mit etwa 1,1 kBit/s bei 7151 MHz statt.[5]
Kapsel
 Die Kapsel während des Baus, die runden Öffnungen werden später mit den Kontrollgewichten bestückt.
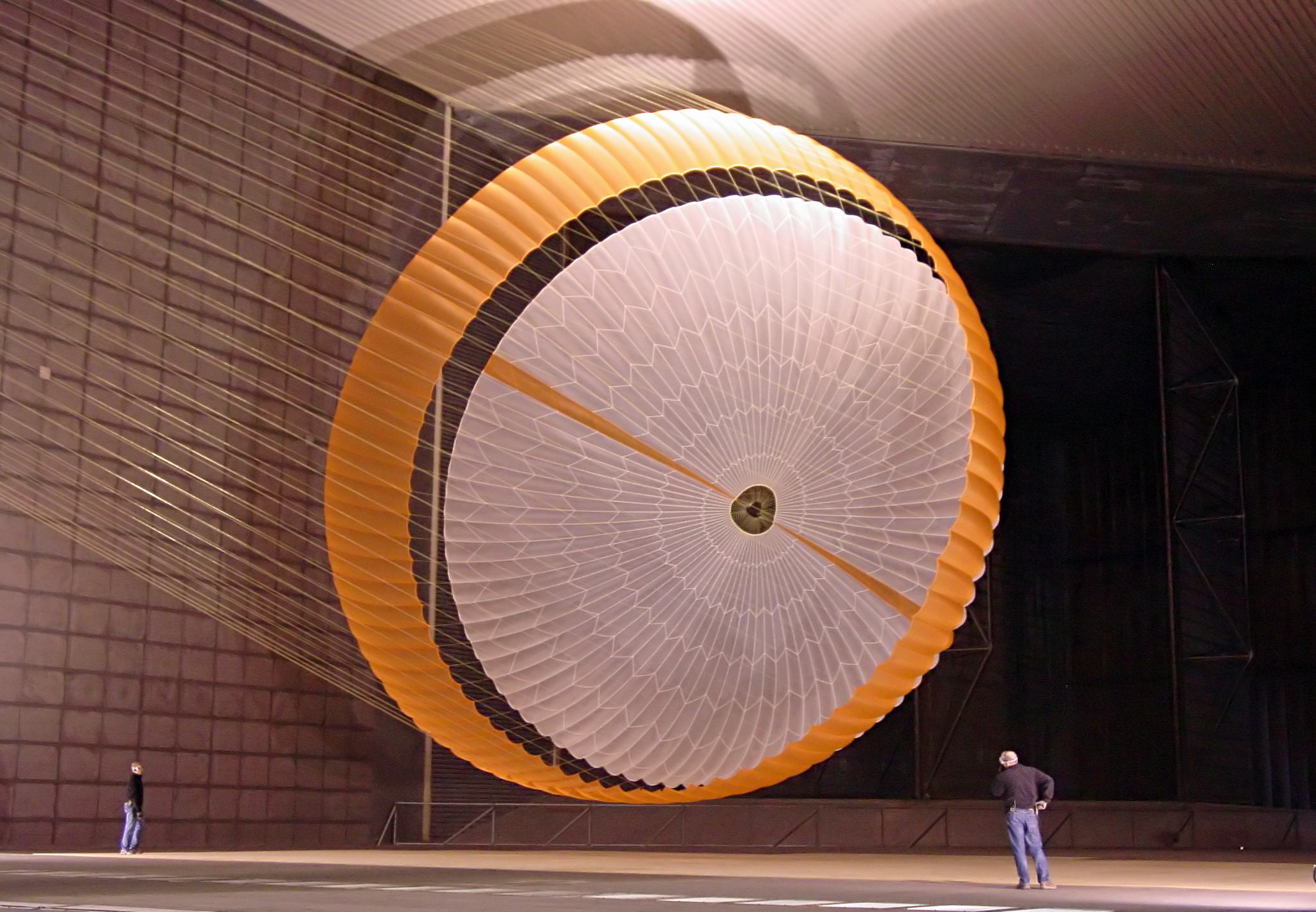
Die Kapsel während des Baus, die runden Öffnungen werden später mit den Kontrollgewichten bestückt. Der Fallschirm bei einem Windkanalversuch
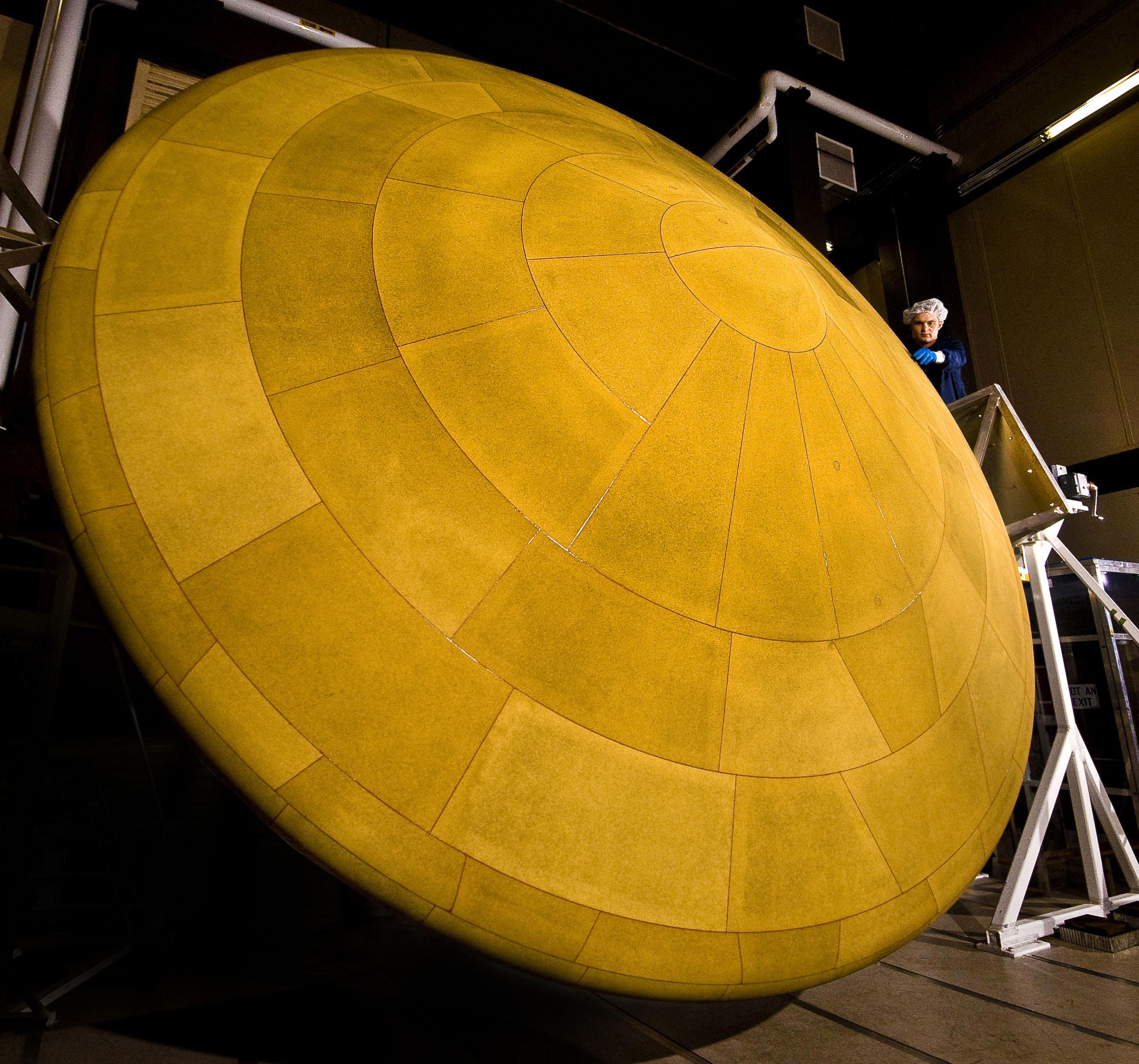
Der Fallschirm bei einem Windkanalversuch Der Hitzeschild; man beachte den Arbeiter hinten rechts.
Der Hitzeschild; man beachte den Arbeiter hinten rechts.Die 731 kg[1] schwere Kapsel, hergestellt von Lockheed Martin, schützt die Abstiegsstufe und „Curiosity“ vor den Einflüssen des offenen Weltraums und vor den harschen Bedingungen während des Eintritts in die Marsatmosphäre. Darüber hinaus enthält sie auch einen Fallschirm zur Abbremsung im unteren Teil der Atmosphäre, an deren Halterung auch mehrere Antennen zur Kommunikation angebracht sind. Die Struktur ist in Wabenkernbauweise ausgeführt, in der zwei CFK-Platten von einem Aluminium-Wabenkern gestützt werden.[6] Auf der Oberfläche befindet sich ein dünner ablativer Hitzeschild, der aus einer korkartigen, siliziumbasierten Verbindung besteht. Hierbei handelt es sich um die letzte Version einer Familie von Werkstoffen, deren Wurzeln bis auf die Viking-Sonden zurückgehen und zuletzt bei der Stardust- und Genesis-Mission verwendet wurden.[6]
Um im Weltraum und während des Eintritts in die Marsatmosphäre Steuermanöver durchzuführen, verfügt die Kapsel über acht kleine Triebwerke (jeweils paarweise angeordnet) und Kontrollgewichte.[7] Letztere sorgen während des Marschfluges dafür, dass die Kapsel exakt ausbalanciert ist. Während des Eintritts werden diese ausgestoßen, um den Schwerpunkt zu verändern, was wiederum Einfluss auf den Anstellwinkel hat.[7] Die Triebwerke, die einen Schub von etwa 267 Newton entwickeln, werden nur zur Kontrolle der Rotation und Ausrichtung genutzt, sie erzeugen keinerlei Bremswirkung.
Auf dem oberen Teil der Kapsel befindet sich der Behälter für den Fallschirm, der die Kapsel weiter abbremsen soll. Dieser misst ca. 16 m im Durchmesser und erreicht mit seinen 80 Befestigungsseilen eine Länge von über 50 m.[8] Die Fallschirmhalterung ist flexibel konstruiert und kann so die Bewegung und die Vibrationen des Schirms bis zu einem gewissen Teil ausgleichen. Planmäßig wird der Fallschirm beim Unterschreiten der Mach-2-Grenze eingesetzt und entwickelt eine Bremskraft von bis zu 289 kN.[8]
Der untere Teil der Kapsel bildet ein ablativer Hitzeschild, der alle anderen Komponenten vor den sehr hohen Temperaturen (bis zu 2000 °C[6]) beim Eintritt in die Marsatmosphäre schützen soll. Mit einem Durchmesser von 4,57 m ist es der größte Hitzeschild, der je für eine Forschungsmission gebaut wurde.[6] Die Kacheln des Schildes bestehen aus einem noch relativ neuen Material, das als „Phenolic Impregnated Carbon Ablator“ (PICA) bezeichnet wird und bis jetzt nur bei der Stardust-Mission verwendet wurde. Es basiert auf einer Kohlenstoff-Phenol-Verbindung, die ein besonders gutes Verhältnis von Schutzwirkung zu Gewicht aufweist. Der Schild widersteht einer thermischen Belastung von 216 W/cm2, einer Scherung von bis zu 540 Pa Scherung und einem Staudruck beim Flug durch die Atmosphäre von etwa 37 kPa.[9]
Der Hitzeschild enthält auch sieben Druck- und Temperaturmesser.[9] Diese sollen die Belastungen des Schildes während des Eintritts mit hoher Genauigkeit aufzeichnen. Die Daten sind für die Konstrukteure von großer Wichtigkeit, da man die Schilde aktuell nach den Ergebnissen von Simulationen konstruiert.[9] Diese sind allerdings auf Objekte in der Atmosphäre der Erde optimiert und nicht auf die des Mars, welche über hundertmal dünner ist und zu 95 % aus Kohlendioxid besteht. Daher wurden bisher große Sicherheitsaufschläge auf die Simulationsergebnisse addiert, um die Mission abzusichern, was allerdings erhebliche Mengen an Nutzlastmasse verbraucht.[9] Die neuen Daten aus dem MSL-Eintritt sollen diese Aufschläge eliminieren oder zumindest stark senken, um so die wissenschaftliche Nutzlast zukünftiger Marsmissionen steigern zu können.[9]
Die Kapsel enthält wie das Marschflugmodul kein eigenes Kommunikationssystem, besitzt allerdings drei Antennen im Bereich der Fallschirmhalterung. Im X-Band sind zwei baugleiche Modelle vorhanden, die „Parachute Low-Gain Antenna“ (PLGA) und die „Tilted Low Gain Antenna“ (PLGA), welche für einen Teil der Kommunikation während des Marschfluges zuständig sind.[5] Beide unterscheiden sich lediglich durch ihre Position an der Struktur, wobei sie so angeordnet sind, dass sie die toten Winkel der anderen Antenne füllen können. Die Richtwirkung der Konstruktion ist sehr gering, so dass keine genaue Ausrichtung nötig ist, was allerdings eine geringe Datenrate bedingt. Der Antennengewinn schwankt zwischen 1 und 5 Dezibel, da es durch die Fallschirmhalterung zu erheblichen Reflektionseffekten kommt.[5] Zu Beginn der Mission (nahe der Erde) können Daten noch mit 1,1 kBit/s empfangen und 11 kBit/s gesendet werden, mit zunehmender Entfernung sinkt die Datenrate jedoch kontinuierlich bis auf wenige Dutzend Bit/s ab.[5]
Während der ersten Landephase findet die UHF-Kommunikation über die „Parachute UHF Antenna“ (PUHF) statt. Hierbei handelt es sich um eine Anordnung von insgesamt acht kleinen Patchantennen, die rundherum an der äußeren Verkleidung der Fallschirmhalterung angebracht sind. Hierdurch ergibt sich ein im Vergleich zur PLGA und TLGA ein sehr stabiles, omnidirektionales Abstrahl- und Empfangsverhalten, so dass auch bei extremen Fluglagen Daten mit ausreichender Geschwindigkeit übertragen werden können.[5] Diese Konstruktion wurde bereits beim Mars-Lander Phoenix erfolgreich erprobt. Der Antennengewinn liegt zwischen -5 und +5 Dezibel, wobei eine Datenrate von mindestens 8 kBit/s erreicht wird.[5]
Abstiegsstufe
Die Abbremsung nach der Abtrennung des Fallschirms in ca. 1800 m über Grund[10] mit Hilfe der Abstiegsstufe erfolgt ausschließlich durch acht Triebwerke, die jeweils paarweise montiert sind.[11] Deren Design basiert auf den Bremstriebwerken der Viking-Lander, wobei die verwendeten Materialien und Steuersysteme dem aktuellen Stand der Technik angepasst wurden. Jedes Triebwerk kann 0,4 bis 3,1 kN Schub generieren und erzielt dabei einen spezifischen Impuls von etwa 2157 s.[11] Zudem ist auch ein Betrieb mit sehr geringer Leistung möglich (1 % des möglichen Treibstoffflusses), um die Triebwerke aufzuwärmen und deren Ansprechverhalten zu verbessern. Der Treibstoffverbrauch beträgt im Schnitt etwa 4 Kilogramm pro Sekunde,[11] bei einem Vorrat von 390 kg[1]. Zur Energieversorgung der Stufe werden zwei Li-FeS2 Thermalbatterien verwendet.
Um die Sinkgeschwindigkeit und Entfernung zum Boden korrekt zu berechnen, besitzt die Abstiegsstufe ein eigenes Radarsystem, das an einem separaten Ausleger montiert ist und den Namen „Terminal Descent Sensor“ (TDS) trägt. Es bestimmt diese Parameter ab einer Höhe von 4 km und einer Geschwindigkeit von unter 200 m/s.[11] Hierzu wird das im Ka-Band (36 GHz) gesendete 12 Watt starke Peilsignal über sechs kleine Antennen abgestrahlt, die einen Öffnungswinkel von je 3° besitzen.[11] Durch diese Anordnung kann das Navigationssystem die Bewegung in allen drei Achsen präzise errechnen, was für den Einsatz des SkyCranes unabdingbar ist. Das System wiegt 25 kg und benötigt während des aktiven Betriebs 120 Watt elektrische Leistung.[11]
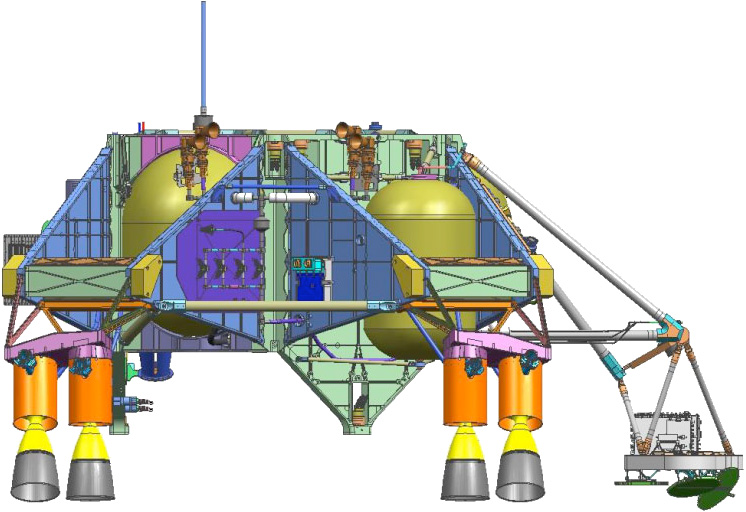
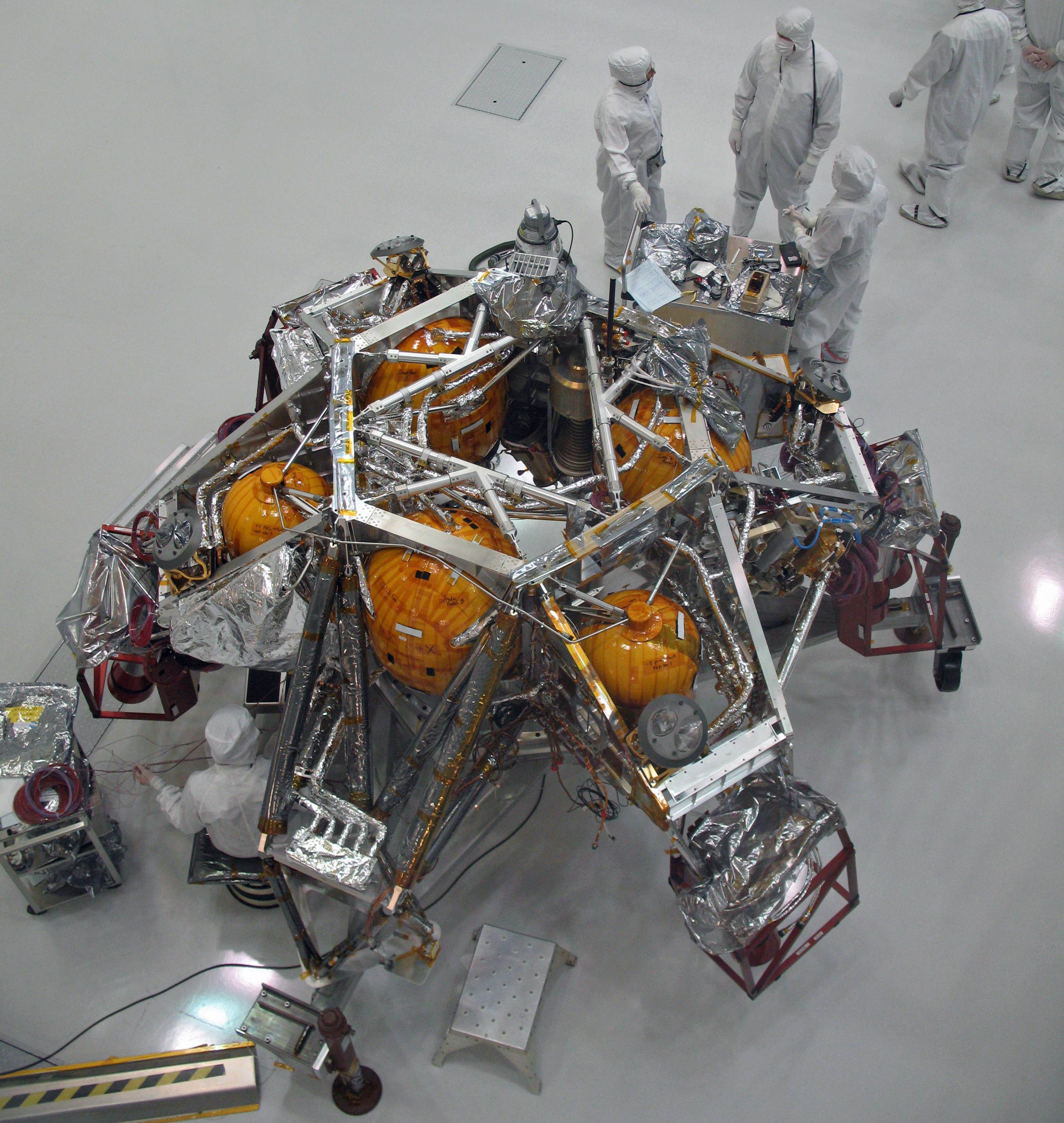
Video eines SkyCrane-Tests Die Abstiegstufe; gut zu erkennen sind die orangen Treibstofftanks
Die Abstiegstufe; gut zu erkennen sind die orangen TreibstofftanksDer bemerkenswerteste Teil der etwa 1,2 Tonnen[1] schweren Abstiegsstufe ist der sogenannte SkyCrane-Komplex. Dieser wird etwa 15 Meter über der Marsoberfläche aktiviert und lässt Curiosity an mehreren ca. acht Meter langen Seilen wie bei einem Baukran auf die Oberfläche hinab.[11] Dieses revolutionär neue Verfahren ermöglicht gegenüber der sonst üblichen Airbag-Methode das sichere Aufsetzen des schweren Rovers auch auf ungünstigem Terrain und verringert die Anforderungen an dessen Erschütterungsresistenz erheblich (Sinkgeschwindigkeit: 0,75 m/s statt ca. 12 m/s bei den MER-Rovern oder etwa 29 m/s bei Beagle 2).[11] Die Aufprallenergie ist so gering, dass das Fahrwerk diese komplett absorbieren kann, wodurch keine zusätzlichen Landevorrichtungen nötig sind, wie etwa spezielle stoßgedämpfte Beine, wie sie zum Beispiel bei den Viking-Landern eingesetzt wurden. Das Aufsetzen des Rovers wird über Kraftsensoren erfasst, da der Zug auf die Seile beim Aufsetzen auf den Boden deutlich nachlässt.[11] Durch diese Messungen wird auch festgestellt, ob Curiosity schräg oder gerade auf dem Untergrund aufsetzt. Nachdem der Rover sicher auf der Marsoberfläche steht, werden die Seile gekappt, und die Abstiegsstufe erhöht nochmals die Triebwerksleistung, um in etwas über hundert Metern Entfernung eine Bruchlandung auszuführen.[11]
Die Abstiegsstufe ist zusammen mit dem Rover selbst der einzige Teil, der über ein eigenes Kommunikationssystem verfügt. Konkret steht der Stufe im Bereich des X-Bands ein Transmitter, genannt „Small Deep Space Transponder“ (SDST), zur Verfügung. Hierbei handelt es sich um eine Weiterentwicklung der Version, die schon bei den Mars Exploration Rovern verwendet wurden.[5] Die beiden wesentlichen Verbesserungen sind eine verbesserte Signalstabilität bei Temperaturschwankungen und ein wesentlich geringerer Leck-Effekt.[5] Der SDST ist für die Kommunikation während des gesamten Marschfluges und der Landephase verantwortlich. Im Rover befindet sich ein baugleiches Modell, das allerdings erst nach der Landung aktiv wird. Signale können bis zu einer Schwelle von -70 dBm empfangen werden, die Bandbreite beträgt, je nach Signalstärke und Einstellung, 20 bis 120 Hertz.[5] Die Datenrate wird durch die Elektronik in Abhängigkeit von der Signalqualität automatisch zwischen 8 und 4000 Bit pro Sekunde eingestellt.[5] Das System wiegt 3 kg und benötigt bis zu 15 Watt Leistung.
Da die Signale des SDST für den Versand von Daten zu schwach sind, werden diese zuerst vom sogenannten „Traveling Wave Tube Amplifier“ (TWTA) verstärkt. Kernelement ist eine Wanderfeldröhre, wobei das Design eine Abwandlung des MRO-Verstärkers ist.[5] Der TWTA benötigt bis zu 175 Watt elektrische Leistung und hat eine Sendeleistung von bis zu 105 Watt. Das System ist gegen Unter- und Überspannungsschäden geschützt und wiegt 2,5 kg.[5]
In der Endphase der Landung, nach der Trennung von der Kapsel, sorgt die „Descent Low Gain Antenna“ (DLGA) für eine Verbindung mit der Bodenstation auf der Erde. Hierbei handelt es sich lediglich um einen offenen Hohlleiter als um eine spezielle Antenne.[5] Dies ist nötig, da es sich auch um das Signalverbindungsstück zwischen Abstiegsstufe und den Antennen der höheren Stufen handelt. Somit verhält sich die Antenne solange als normaler Hohlleiter, bis die Trennung von der Kapsel erfolgt und das Ende freiliegt[5]. Der Antennengewinn schwankt zwischen -5 und +8 Dezibel, da es je nach Fluglage zu vielfältigen Reflexionen und Interferenzen mit der umliegenden Struktur kommt. Das Gewicht der “Antenne” beträgt 0,45 kg.[5]
Nach Abtrennung der Kapsel geht für das UHF-Kommunikationssystem der Kontakt zur PUHF-Antenne verloren, so dass nun die „Descent UHF Antenna“ (DUHF) eingesetzt wird, um die Datenverbindung in diesem Frequenzband aufrechtzuerhalten.[5] Der Antennengewinn ist aufgrund von Reflexionen und Interferenzen der umliegenden Struktur extrem volatil, er schwankt zwischen −15 und +15 Dezibel.[5]
Technik des Rovers „Curiosity“
Vergleich zu früheren Mars-Rovern
 Die Modelle der drei Rover im Vergleich, von links nach rechts: MER, Sojourner, Curiosity
Die Modelle der drei Rover im Vergleich, von links nach rechts: MER, Sojourner, CuriosityCuriosity MER Sojourner Startjahr 2011 2003 1996 Masse (kg) 900 185 10,6 Abmessungen (Meter, L×B×H) 3,1 × 2,7 × 2,1 1,6 × 2,3 × 1,5 0,6 × 0,4 × 0,8 Energieerzeugung (kWh/Sol) 2,9 0,3–0,9[12] max. 0,1[13] Wissenschaftliche Instrumente 10 4 3 Max. Geschwindigkeit (m/Tag) 144 180 36 Daten (MB/Tag) 19 – 31 6 – 25[14] max. 3,5[15] Rechenleistung (MIPS) 400 35 0,1 Arbeitsspeicher (MB) 256 128 0,5 Quelle: Wikipedia, sofern nicht abweichend angegeben
Energieversorgung
Im Gegensatz zu früheren Rover-Missionen auf dem Mars wird Curiosity statt mit den üblichen Solarzellen mit einer Radionuklidbatterie betrieben, die als „Multi-Mission Radioisotope Thermoelectric Generator“ (MMRTG) bezeichnet wird. Diese Lösung ist unabhängig vom Wetter, bietet eine stabile thermische Umgebung für die Systeme im Rover und sorgt für höhere Mobilität.[16] Zudem ist die Konstruktion leichter als ein Solarpanel mit gleicher Leistung, so dass mehr Raum für wissenschaftliche Instrumente bleibt.[16] Die 43 kg schwere Batterie enthält 4,8 kg Plutoniumdioxid, das durch seinen radioaktiven α-Zerfall (Halbwertzeit: 87,7 Jahre) 4000 Watt Wärmeenergie freisetzt[17]. Diese Wärme wird mittels TeSbGeAg- und PbTe[4]-Thermoelementen in 120 Watt elektrische Energie umgewandelt[18], was einer Effizienz von 3 % entspricht. Die erzeugte Gleichspannung liegt bei 28 Volt, was auch der Spannung des Bordnetzes entspricht. Ein Teil der entstehenden Wärme wird auch verwendet, um das Innere des Rovers auf einer optimalen Betriebstemperatur zu halten.
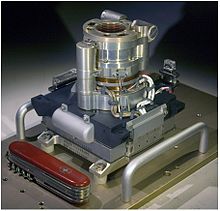
 Der Prototyp des MMRTG im Labor
Der Prototyp des MMRTG im LaborDie von Boeing[19] entworfene Konstruktion basiert äußerlich auf der SNAP-19-Batterie, die bereits bei Pioneer 10/11 und Viking 1/2 erfolgreich zum Einsatz kam.[18] Im Inneren werden jedoch acht „General Purpose Heat Source“-Kapseln verwendet, die das gesamte radioaktive Material enthalten und die benötigte Wärme liefern.[17] Diese gelten ebenfalls als erprobt, da sie schon bei den Sonden Cassini-Huygens, Galileo, Ulysses und New Horizons verwendet wurden.
Da das enthaltene Plutonium (zum größten Teil Pu238) hochgradig radioaktiv und giftig ist, wurde ein mehrschichtiges Sicherheitskonzept implementiert, um dessen Freisetzung bei einem Fehlstart der Rakete zu verhindern. Es befindet sich in einer keramischen Plutoniumdioxid-Struktur[20][21], die bei mechanischer Belastung nicht zu feinem Staub, sondern in größere Bruchstücke zerfällt, die nicht in die Lunge gelangen können. Außerdem kann das Material der Hitze beim Wiedereintritt widerstehen, ohne zu verdampfen, und reagiert chemisch kaum mit anderen Stoffen wie Luft oder Wasser. Innerhalb der Batterie ist die Plutoniumkeramik in acht einzelnen Kapseln untergebracht, die alle über einen eigenen Hitzeschild und aufprallsicheres Gehäuse verfügen.[20] Innerhalb dieser Kapseln ist die Keramik von mehreren Lagen unterschiedlicher Materialien umgeben (darunter Iridium und Graphit), die durch ihren hohen Schmelzpunkt und ihre große Resistenz gegenüber Korrosion den Austritt radioaktiver Stoffe nach einem Aufschlag verhindern sollen.[20]
Die NASA gibt die Wahrscheinlichkeit eines Unfalls mit Freisetzung von Radioaktivität mit 0,4 % an.[22] In diesem Fall soll die individuelle Belastung mit Radioaktivität im Startgebiet jedoch nur bei 0,05–0,10 Millisievert liegen (entspricht etwa einer Röntgenuntersuchung des Kiefers).[22]
Um auch mehrere energieintensive Systeme, wie zum Beispiel das SAM-Instrument, für einen kurzen Zeitraum parallel betreiben zu können, verfügt Curiosity über zwei zusätzliche Lithium-Ionen-Akkumulatoren. Diese besitzen eine Kapazität von jeweils 20 Amperestunden und liefern eine Ausgangspannung von 28 Volt.[23]
Elektronik
Die Datenverarbeitung des Rovers findet im sogenannten „Rover Compute Element“ (RCE) statt, von dem auch eine baugleiche Reserve-Einheit vorhanden ist. Der zentrale Bestandteil eines RCE ist ein RAD750-Prozessor von BAE Systems, der eine Taktrate von 200 MHz aufweist und etwa 400 Millionen Instruktionen pro Sekunde verarbeiten kann.[24][25] Der Prozessor, der sich in einem CCGA-Gehäuse befindet, ist für eine Gesamtstrahlendosis von einem Mrad spezifiziert und kann innerhalb einer sehr großen Temperaturspanne (-55 °C bis 125 °C) arbeiten.[25] Darüber hinaus ist seine Struktur, die eine Breite von 150 nm aufweist, gegen den Latch-Up-Effekt immun.[25] Zur Speicherung von Daten steht ein Arbeitsspeicher mit einer Größe von 256 MiB, ein Flash-Speicher mit 2 GiB und ein EPROM mit 256 KiB zur Verfügung, wobei alle Teile fehler- und strahlungstolerant ausgelegt sind.[26] Als Betriebssystem kommt VxWorks zum Einsatz, das über 130 Threads verwaltet.[27] Insgesamt wurden 2,5 Millionen Zeilen C-Code für die Missionssoftware geschrieben.[27]
Kommunikation
Für einen illustrierten Überblick siehe auch den Abschnitt Überblick Kommunikationssystem
Zur Kommunikation mit der Bodenstation auf der Erde verfügt Curiosity über zwei Kommunikationskomplexe. Einer arbeitet im X-Band (7 – 8 GHz) und ist für den Empfang von Steuerkommandos und das Senden von Statusdaten zuständig, der andere Komplex arbeitet im UHF-Band (0,4 GHz) und sorgt für die Übertragung von wissenschaftlichen Daten mit hohem Datenvolumen (bis zu 250 Mbit pro Tag) während der Primärmission. In der Marschflugphase ergänzt es das X-Band-System in seiner Rolle. Dies ist auch der Fall, wenn keine direkte Sichtverbindung zur Erde besteht oder wenn sich der Rover aufgrund eines Systemfehlers im sicheren Modus befindet.
 Ein Electra Lite Transponder.
Ein Electra Lite Transponder.Das UHF-System verfügt über zwei redundante Transmitter, genannt „Electra Lite Transponder“ (ELT), welche alle Bauteile für die Verarbeitung und Erzeugung von Funksignalen enthalten (Verstärker, Oszillator, Transponder ect.).[5] Hierbei handelt es sich um eine leichtere und weniger leistungsfähige Variante des Systems, welches schon beim Mars Reconnaissance Orbiter zum Einsatz kam. Die Datenrate beim Senden, welche automatisch in Abhängigkeit der Signalqualität von der Elektronik gewählt wird, beträgt bis zu 2 MBit/s, beim Empfang bis zu 256 kBit/s.[5] Jeder Transmitter wiegt 3 kg und benötigt bis zu 96 Watt elektrische Leistung.
Die „Rover UHF Antenna“ (RUHF) ist die primäre Antenne von Curiosity, um wissenschaftliche Daten an die Bodenstation auf die Erde zu übertragen. Hierbei dient das UHF-Kommunikationssystem des Mars Reconnaissance Orbiters als Relaisstation.[5] Dieser empfängt die Signale von Curiosity, verarbeitet diese und überträgt sie dann über ein Hochleistungssendesystem im X-Band an die Antennen des Deep Space Network auf der Erde. Sollte der Mars Reconnaissance Orbiter beim Eintreffen des Rovers nicht mehr funktionsfähig seien, so kann auch Mars Odyssey als Relais verwendet werden, wobei die Datenrate etwas geringer ausfallen würde.[5] Darüber hinaus ist auch das UHF-System der ESA-Sonde Mars Express in der Lage, mit Curiosity zu kommunizieren, allerdings ist dies nur kurzzeitig während eventueller Notsituationen vorgesehen.[5] Die RUHF ist als Wendelantenne ausgeführt und erreicht aufgrund ihrer schwachen Richtwirkung in einem großen Winkelbereich einen Antennengewinn von etwa 3–6 dB. Daten werden bei 437 MHz empfangen, gesendet wird bei 401 MHz.[5]
 Der Small Deep Space Transponder
Der Small Deep Space TransponderIm Bereich des X-Bands steht Curiosity ein Transmitter, genannt „Small Deep Space Transponder“ (SDST), zur Verfügung, welcher baugleich zu dem in der Abstiegsstufe ist.[5] Der SDTS an Bord von Curiosity wird normalerweise nicht für die Kommunikation während des Marschfluges verwendet, da die Signale bedeutend schwächer sind als die der Abstiegsstufe. Sollte der SDST oder Verstärker dieser Stufe jedoch ausfallen, kann das Sende-Empfangs-System des Rovers auch per Schalter an die Antennen der anderen Stufen angeschlossen werden.[5] Allerdings wird das bereits um 85 % schwächere Signal durch diese Schaltung nochmals um 6 dB gedämpft, so dass die Datenrate um ein Vielfaches geringer ausfällt.[5]
Da die Signale des SDST für den Versand von Daten zu schwach sind, werden diese zuerst vom sogenannten „Solid State Power Amplifier“ (SSPA) verstärkt. Hierbei handelt es sich um einen Transistorverstärker (MESFET/HEMT-Kombination) dessen Design eine Weiterentwicklung der entsprechenden Systeme der Mars Exploration Rover ist.[5] Er kann das Signal auf bis zu 15 Watt verstärken, wobei hierfür bis zu 62 Watt elektrische Leistung benötigt wird. Der Verstärker wiegt 1,4 kg, ist für Strahlendosen von bis zu 100 krad spezifiziert und wird von General Dynamics hergestellt.[5]
Die HGA („High Gain Antenna“) sorgt für den Empfang von Kommandos und das Senden von Statusdaten im X-Band. Es handelt sich um eine Patchantenne mit sehr starker Richtwirkung, weswegen sie sehr präzise auf die Erde ausgerichtet werden muss.[5] Allerdings lassen sich so trotz geringer Verstärkerleistung relativ hohe Datenraten erzielen. Sie misst 28 cm im Durchmesser und wiegt insgesamt 8 kg. Der Antennengewinn beträgt bei optimaler Ausrichtung im Sendebetrieb 26 dB, beim Empfang 21 dB.[5] Bereits eine Fehlausrichtung von 8° führt zu einer Halbierung des Gewinns, bei mehr als 12° Abweichung ist keine Kommunikation mehr möglich. Die Datenrate beim Senden beträgt mindestens 160 Bit/s oder 800 Bit/s, je nach Größe der Empfangsantenne auf der Erde. Kommandos können typischerweise mit einer Rate von 190 Bit/s empfangen werden.[5] Gesendet wird bei einer Frequenz von 8395 Mhz, der Empfang findet bei 7183 MHz statt.
Sollte es ein Problem mit der HGA geben (z. B. durch einen Defekt der Ausrichtungsmechanik) steht die sogenannte „Rover Low Gain Antenna“ (RLGA) als Reserve zur Verfügung. Diese besitzt praktisch keine Richtwirkung, was die Kommunikation aus fast jeder Lage heraus ermöglicht.[5] Allerdings reduziert diese Eigenschaft die Datenrate sehr stark (bis auf wenige Bit pro Sekunde unter schlechten Bedingungen), so dass diese Antenne nur in Notfällen verwendet wird. Aufgrund des extrem schwachen Sendesignals können nur unter sehr guten Bedingungen überhaupt Daten an die Bodenstation gesendet werden (mit einigen Dutzend Bit pro Sekunde).[5] Die RLGA ist im Wesentlichen ein offener Hohlleiter mit einem speziellen Aufsatz, um ein breites Antennendiagramm zu erzeugen.
Antriebssystem
Kurze Dokumentation zu einem Fahrtest des Prototypen (englisch)Zur Fortbewegung auf der Marsoberfläche kommen insgesamt sechs Räder zum Einsatz, die symmetrisch an zwei Rohrgestellen ("Bogies") befestigt sind, welche wiederum durch eine einzelne Achse im Schwerpunkt des Rovers miteinander verbunden sind. Als Material kommt bei dem Gestell Titan zum Einsatz, während die Räder aus Aluminium bestehen, welches auf der Oberfläche so dünn ist, dass es sich in etwa wie konventionelle Autoreifen aus Gummi verhält.[28] Jedes Rad misst 51 cm im Durchmesser und weist eine Profiltiefe von etwa 1,3 cm auf.[29] Pro Rad ist ein dedizierter, bürstenloser Gleichstrommotor vorhanden, der für insgesamt 45 Mio. Umdrehungen während der gesamten Mission ausgelegt ist.[30] Gelenkt wird der Rover über die beiden Radpaare vorne und hinten, welche sich um 90° nach links oder rechts drehen können, wodurch sich Curiosity auch auf der Stelle um 360° drehen kann.[31] Das Antriebssystem ist in der Lage, den Rover mit bis zu vier Zentimeter pro Sekunde fortzubewegen, und ermöglicht diesem, Neigungen von bis zu 45° (in alle Richtungen) sowie bis zu 75 cm hohe Hindernisse zu bewältigen.[31][32] In der Praxis auf dem Mars werden diese Spezifikationen jedoch aus Sicherheitsgründen nicht voll ausgereizt, weswegen man von einer effektiven Geschwindigkeit von 0,15 bis 0,45 cm/s ausgeht, was einer Fahrstrecke von 100 bis 300 Metern pro Tag entspricht.[32] Auch ist die Steuerungssoftware so programmiert, dass sie Neigungen von über 30° vermeidet.[31] Um den Aufwand für das Bodenteam zu reduzieren, ist Curiosity mit einer Software ausgestattet, die autonom Hindernisse erkennen und umfahren kann. Hierdurch wird der Rover effektiv deutlich schneller, da nicht jeder Bewegungsbefehl von der Erde gesendet werden muss (Signallaufzeit: bis zu 40 Minuten). Zur Erfassung der benötigten Umgebungsdaten sind vier sogenannte „Hazard Avoidance Cameras“ (Hazcam) am unteren Teil des Rovers angebracht.[33] Es handelt sich jeweils um ein Paar aus zwei Schwarz-Weiß-Kameras, die zusammen ein Sichtfeld von 120° abdecken und 3D-Aufnahmen anfertigen können.[33] Somit kann die gesamte Umgebung bis in vier Meter Entfernung nach Hindernissen durchsucht werden.
Roboterarm und Probengewinnung
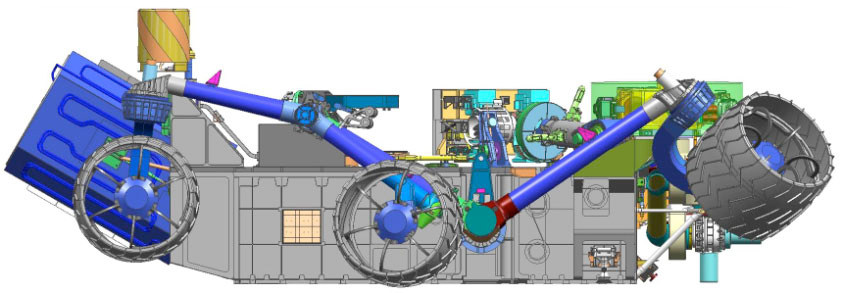
 Der Roboterarm mit der Bohr- und Instrumentenplattform an dessen Ende
Der Roboterarm mit der Bohr- und Instrumentenplattform an dessen EndeCuriosity besitzt einen etwa zwei Meter langen Roboterarm an seiner Frontseite, der die Bezeichnung „Sample Acquisition, Processing, and Handling“ (kurz „SA/SPaH“) trägt. Durch seine drei Gelenke ähnelt dessen Auslegung dem menschlichen System aus Schulter-, Ellbogen- und Handgelenk, wodurch er sehr beweglich ist (fünf Freiheitsgrade). Diese Eigenschaft wird benötigt, um einige Instrumente nahe an die zu untersuchenden Objekte heranzubringen. Außerdem verfügt der Arm an seinem Ende noch über einen ein Bohrsystem, eine Baggerschaufel, eine Bürste und ein Sieb mit verschiedenen Auffangbehältern. Durch diese Ausrüstung können auch tiefere Boden- und Gesteinsschichten für Analysen zugänglich gemacht werden. Die beiden wissenschaftlichen Instrumente, APXS und MAHLI, sind vom Gehäuse entkoppelt, um Probleme durch die Vibrationen während des Bohrens zu vermeiden. Alle Vorrichtungen sind an einem drehbaren Kopfelement am Ende des Arms angebracht. Der wichtigste Teil des Arms ist der Bohrer an der Spitze. Dieser kann bis zu 5 cm tiefe Löcher in Felsen bohren, wobei das Material des Bohrkerns pulverisiert und dann zum CHIMRA Filtersystem gefördert wird.[34] Neben der drehenden Bewegung wird der Bohrkopf auch bis zu 30-mal pro Sekunde gegen das Zielgestein gehämmert, damit dieses besser durchdrungen und zerkleinert werden kann. Hierbei kann die Einschlagsenergie zwischen 0,05 und 0,8 Joule liegen.[34] Sollte sich ein Bit festfahren und nicht wieder herausgezogen werden können, so kann dieses abgetrennt und durch ein neues Bit ersetzt werden.[34] Hierfür befinden sich zwei Reserve-Bits in entsprechenden Halterungen an der Vorderseite des Rovers. Das gesamte Bohrsystem ist für 81 Bohrvorgänge spezifiziert und kann in einem Temperaturbereich von +70 °C bis -70 °C arbeiten.[34]
Für die erste Aufbereitung der Bohrproben ist das „Collection and Handling for Interior Martian Rock Analysis“-System (CHIMRA) zuständig, welches sich am vorderen Ende des Arms befindet. Es kann mit Hilfe mehrerer Siebe Partikel größer als 150 µm oder 1000 µm (je nach Einstellung) aus der Probe entfernen und das übrig gebliebene Material in mehrere kleine Auffangbehälter leiten.[35] Darüber hinaus ist eine Schaufel vorhanden, mit der loser Marsboden auch direkt ohne Bohrvorgang aufgenommen werden kann.[35] Alle Fördervorgänge werden durch Drehen und Kippen des Arms ausgelöst, an einigen Stellen sind auch vibrierende Elemente untergebracht, um das Anhaften von Material im Inneren von CHIMRA zu vermeiden, da dieses nachfolgende Proben verunreinigen könnte.[35]
Da Curiositys Instrumente hochempfindlich bei der Detektion von organischen Substanzen sind, muss sichergestellt werden, dass die Messergebnisse nicht durch terristische Verunreinigungen oder Beschädigungen verzerrt werden.[36] Daher befinden sich an der Vorderseite des Rovers fünf etwa faustgroße Behälter, die mit einer amorphen Siliciumdioxid-Keramik und einer kleinen Menge zweier Fluorphenole gefüllt sind.[36] Letztere können von den Instrumenten zwar wahrgenommen werden, kommen aber in der Natur gewöhnlicherweise nicht vor. Wenn der Keramikblock also angebohrt wird, können anhand von Differenzen zwischen erwarteten und tatsächlichen Messergebnissen Kontaminationen und Verluste innerhalb des Förder- und Analysesystems erfasst werden.[36] Somit können auch ungewöhnliche Messergebnisse sicher als Fehler oder als Tatsache identifiziert werden.
Mast
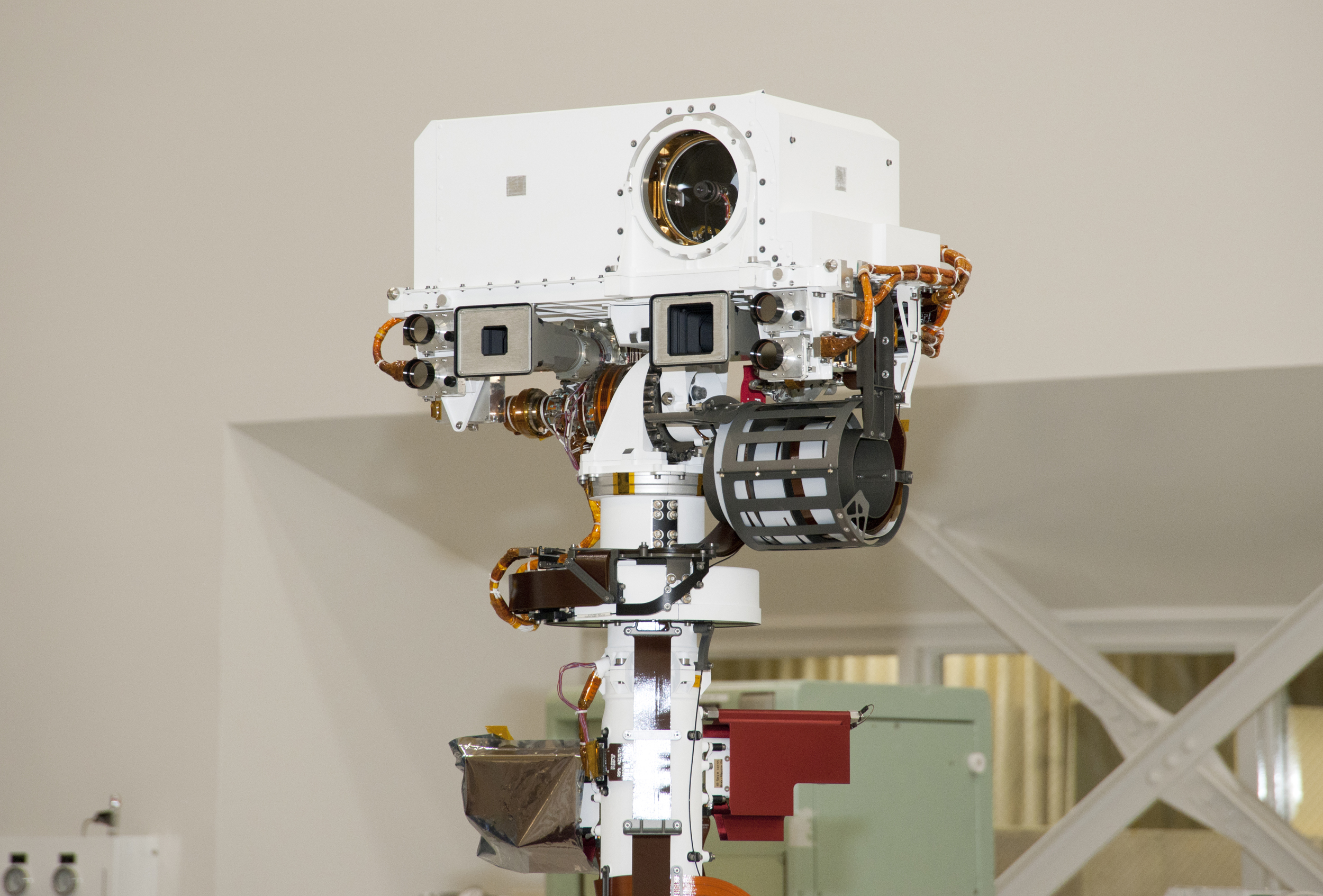
 Der “Kopf” des Mastes (ohne REMS)
Der “Kopf” des Mastes (ohne REMS)Ein auffälliges Merkmal von Curiosity ist der 1,1 Meter[33] hohe Mast (auch als „Remote Sensing"-Mast bezeichnet) an der vorderen linken Ecke des Chassis. Um Platz zu sparen, ist er während des Marschfluges nach hinten geklappt und wird erst nach der Landung in eine aufrechte Position gebracht. Der obere Teil, der fast alle Instrumente enthält, ähnelt in seiner Bewegungsfreiheit dem menschlichen Kopf, wobei er sich allerdings um 360° drehen kann. Folgende wissenschaftliche Instrumente sind am Mast angebracht:
- Mast Camera (MastCam)
- Chemistry & Camera (ChemCam)
- Rover Environmental Monitoring Station (REMS), zwei Sonden am “Hals”.
Für die Navigation und Orientierung kommen zu diesen Instrumenten noch zwei „Navigation Cameras“ (Navcams) hinzu. Hierbei handelt es sich um eine Anordnung von insgesamt vier identischen Schwarz-Weiß-Kameras mit einer Auflösung von effektiv je 1024 × 1024 Pixeln.[33] Diese sind je paarweise rechts und links neben der MastCam angebracht und ermöglichen so die Anfertigung von 3D-Bildern.[33] Es sind stets nur je eine Kamera rechts und links aktiv, die anderen beiden sind mit dem Reservecomputer verbunden und daher als Backup gedacht. Die Optik weist eine Brennweite von 15 mm, eine Blendenzahl von f/12 und eine Nahgrenze von 0,5 m auf.[33] Zusammen mit dem CCD-Bildsensor erreicht die Konstruktion eine Auflösung von 0,82 mrad pro Pixel und ein Sichtfeld von 45°. Jede Kamera wiegt 220 Gramm und benötigt im Betrieb etwa 2,2 Watt el. Leistung, wobei alle 5,4 Sekunden ein Aufnahme mit einer Belichtungszeit von bis zu 335 Sekunden gemacht werden kann.[33]
Wissenschaftliche Instrumente
Mast Camera (MastCam)
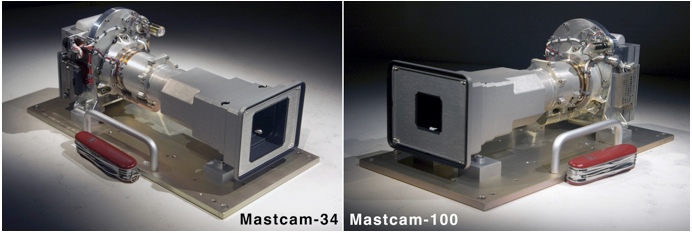
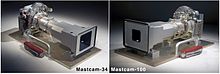 Die beiden Kameras im Vergleich zu einem Schweizer Taschenmesser
Die beiden Kameras im Vergleich zu einem Schweizer TaschenmesserBei der „Mast Camera“ (kurz „MastCam“) handelt es sich um einen Komplex aus zwei hochauflösenden Kameras, die am großen Mast von Curiosity befestigt sind. Mit ihnen sollen die Topologie, feine Oberflächenstrukturen und die Atmosphäre optisch im sichtbaren und nahem infraroten Spektrum untersucht werden.[37] Zeitweise war die Verwendung von Zoomobjektiven im Gespräch, diese konnten aber nicht rechtzeitig einsatzreif gemacht werden, so dass die Brennweite fest eingestellt ist. Beide Kameras verwenden denselben Bayer-Sensor, der eine Auflösung von 1200 × 1200 Pixel (1,44 Megapixel) erreicht und in der Lage ist, 720p-Videos mit etwa 10 Bildern pro Sekunde aufzunehmen.[37]
Auch die Elektronik für die Verarbeitung und Zwischenspeicherung der Bilddaten ist identisch. Sie beinhaltet je Kamera 8 GB Flash-Speicher, welcher Platz für ca. 5500 unbearbeitete Bilder bietet.[37] Diese können anschließend in Echtzeit entweder verlustfrei oder verlustbehaftet mit dem JPEG-Verfahren komprimiert werden. Die beiden Kameras unterscheiden sich nur hinsichtlich der verfügbaren Filter, dem Gesichtsfeld und der Brennweite.[37] Letztere liegt bei der Mastcam-34 bei 34 Millimetern, bei der Mastcam-100 sind es 100 mm. Der Sichtbereich ist bei der Mastcam-34 mit 15° deutlich größer als bei der Mastcam-100, welche nur 5,1° erreicht.[37] Beide Kameras können über einen Bereich von 2,1 m bis ins unendliche fokussieren, womit die Mastcam-100 auf 2 m Distanz Strukturen mit einer Genauigkeit von bis zu 0,15 mm auflösen kann.[37] Darüber hinaus ist ein Filtersystem vorhanden, um gezielte wissenschaftliche Analysen zu ermöglichen. Die einzelnen Filter sind auf einem Rad vor dem Bildsensor montiert und werden diesem je nach Bedarf durch Drehung vorgeschaltet. Jede Kamera verfügt über acht Filter, wobei die Mastcam-34 eher auf den sichtbaren, die Mastcam-100 eher auf den infraroten Bereich fokussiert ist.[37] Der gesamte MastCam-Komplex wurde von Malin Space Science Systems entwickelt und gebaut.
Chemistry & Camera (ChemCam)
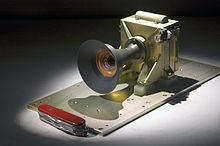
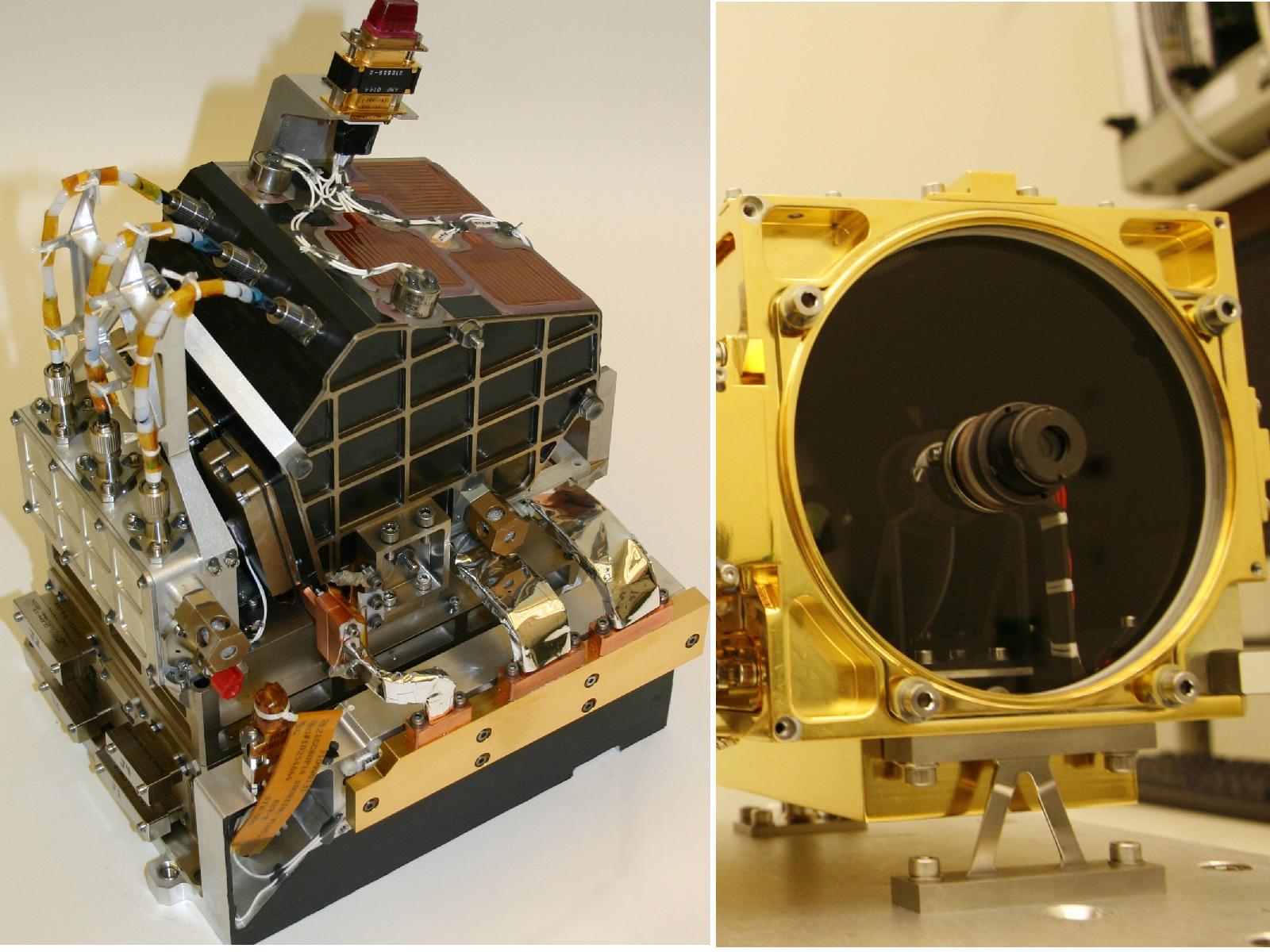
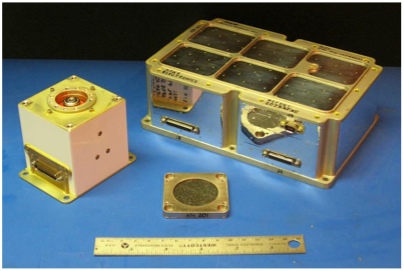
 Das interne Spektrometer (links) und das Laser-Teleskop (rechts) für den Mast
Das interne Spektrometer (links) und das Laser-Teleskop (rechts) für den MastDer „Chemistry & Camera“-Komplex (kurz „ChemCam“) besteht aus einem leistungsstarken Laser, einem Spektrometer und einer speziellen Kamera. Diese Gerätekombination ist in der Lage, den Marsboden sowie Felsen und Geröll auf eine Entfernung von bis zu 7 Metern mit hoher Genauigkeit zu analysieren.[38] Hierzu wird der Laser auf einen kleinen Punkt fokussiert, um die dortige Materie stark zu erhitzen. So können zum einen die obersten Schichten des Objektes entfernt werden, zum anderen werden die entstehenden Gase und Plasmen durch das optische Spektrometer auf ihre Zusammensetzung hin untersucht.[38] Ein Teil des Komplexes ist am Mast befestigt, so dass eine Vielzahl von Zielen in kurzer Zeit durch dessen gute Beweglichkeit analysiert werden können. Die schnelle Identifizierung von Gesteinssorten ist somit auch die Primäraufgabe der ChemCam, um so interessante Ziele für genauere Untersuchungen mit anderen Instrumenten zu finden. Weitere Aufgaben sind die Analyse von Erosions- und Wettereffekten, die Erfassung von Eis und Frost sowie die schnelle Erkennung von Hydrogencarbonaten.[38] Bei dem System handelt es sich um eine kooperative Entwicklung unter der Führung des Los Alamos National Laboratory und des Centre d'Etude Spatiale des Rayonnements, einer französischen Weltraumforschungseinrichtung nahe Toulouse.
Der Komplex aus Laser und Spektrometer trägt die Bezeichnung „Laser-Induced Breakdown Spectrometer“ (LIBS) und ist für den wesentlichen Teil der Analyse zuständig. Bei dem Laser handelt es sich um eine wesentliche Innovation innerhalb der Raumfahrt, da solche Geräte zuvor entweder nur eine extrem geringe Reichweite aufwiesen oder nur zur Distanzmessung eingesetzt wurden. Er generiert extrem kurze und schwache Laserimpulse mit einer Länge von fünf Nanosekunden und einer Energie von jeweils 14 Millijoule.[38] Durch das sehr häufige Abstrahlen und starke Fokussieren dieser Impulse wird allerdings eine Wärmeleistung von über 10 Megawatt pro Quadratmillimeter erreicht.[38] Diese Energie wirkt hierbei auf einen Punkt mit einem Durchmesser von 0,3 bis 0,6 mm, was für wissenschaftliche Analysen ausreichend groß ist. Durch diese großen Energiemengen wird auf der Zieloberfläche Plasma erzeugt, dessen abgestrahlte Emissionen von einem kleinen Teleskop (Durchmesser: 11 cm) aufgefangen und in einen Lichtwellenleiter geleitet werden.[38] Dieser endet im optischen Spektrometer, welches ein Spektrum von 240 bis 850 nm abdeckt (fernes UV- bis nahes Infrarot-Licht) und 6144 Spektralkanäle mit einer Auflösung von 0,09 bis 0,30 nm unterscheiden kann.[38] Das verwendete Spektrometer ist besonders empfindlich bei der Identifizierung von seltenen Elementen wie Barium oder Strontium sowie bei der Erfassung von Wasserstoff und ist im zentralen Chassis des Rovers untergebracht.
Zur besseren Erfassung des Kontextes in dem LIBS arbeitet ist der „Remote Micro-Imager“ (RMI) vorhanden, der sehr genau erfassen kann, wo genau der Laserstrahl auftrifft.[38] Hierbei handelt es sich um einen CCD-Bildsensor mit 1024 × 1024 Pixeln und einem Sichtfeld von 1,1°. Als Optik wird das Teleskop des LIBS mitverwendet.[38]
Rover Environmental Monitoring Station (REMS)
 Die beiden Ausleger des REMS werden am Mast montiert
Die beiden Ausleger des REMS werden am Mast montiertFür allgemeine meteorologische Messungen ist die „Rover Environmental Monitoring Station“ zuständig. Sie misst Windgeschwindigkeit und -richtung, UV-Strahlung, Bodentemperatur sowie den Druck, die Temperatur und die relative Feuchtigkeit der Atmosphäre.[39] Alle Sensoren, mit Ausnahme des UV-Messgerätes und des Drucksensors, befinden sich am Mast des Rovers, die Elektronik ist im zentralen Chassis untergebracht. Der gesamte Komplex wiegt 1,3 kg und wurde von Spanien in das Projekt eingebracht.[39]
Auffälligster Teil des Systems sind die zwei stabförmigen Ausleger am Mast. Jeder besitzt einen Hitzedraht-Windmesser und ein Thermosäulen-Thermometer.[39] Letztere besitzen einen Messbereich von −120 bis +30 °C bei einer Genauigkeit von 5 °C und einer Auflösung von 0,1 °C. Die Windmesser können horizontale Winde im Bereich von 0 bis 70 m/s mit einer Genauigkeit von 1 m/s und einer Auflösung von 0,5 m/s messen.[39] Vertikale Winde können hingegen nur bis 20 m/s erfasst werden. Das Messgerät für die relative Luftfeuchtigkeit ist am zweiten Ausleger montiert und bietet eine Auflösung von 0,1 %, wobei der Messbereich von 0 bis 100 % reicht.[39] Am ersten Ausleger ist wiederum der Sensor für die Bodentemperatur angebracht. Dieser kann Temperaturen von −120 bis +30 °C mit einer Genauigkeit von 10 °C und einer Auflösung von 2 °C messen. Das UV-Messgerät befindet sich nicht am Mast, sondern auf der Oberseite des zentralen Chassis. Zur Messung besitzt er insgesamt sechs Photodioden, welche das Spektrum von UV-A bis UV-E abdecken.[39] Die Genauigkeit liegt bei 5 %, und es wird eine Auflösung von 0,5 % erreicht. Da sich ablagernder Staub die Messung verfälschen würde befinden sich in der Nähe der Dioden einige Magneten, um den magnetisierten Teil des Staubs abzulenken.[39] Mit der Mastkamera werden aber periodisch Bilder der Dioden gemacht, um die Staubbedeckung zu ermitteln und die Messergebnisse entsprechend zu korrigieren. Auch der Drucksensor befindet sich am Chassis bei der Elektronik des REMS-Komplexes. Der Messbereich liegt zwischen 1 und 1150 Pa bei einer Genauigkeit von 10 Pa und einer Auflösung von 0,5 Pa.[39]
Chemistry & Mineralogy (CheMin)
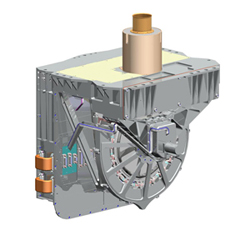
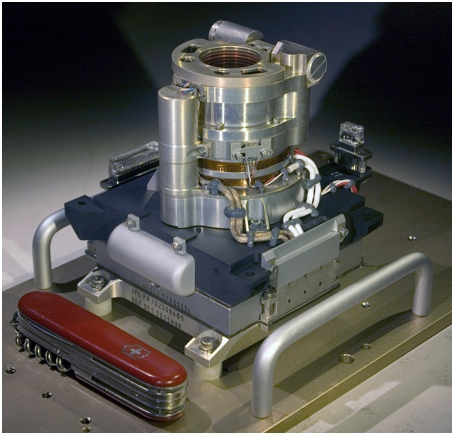
 CAD-Grafik des CheMin, gut zu erkennen ist das Drehrad unten.
CAD-Grafik des CheMin, gut zu erkennen ist das Drehrad unten.Bei dem CheMin-Instrument handelt es sich um ein weiteres Spektrometer, das gesammelte Bodenproben analysieren soll. Dies geschieht mit Hilfe einer Röntgenquelle, welche die Probe bestrahlt, und einem CCD-Sensor, der über das Phänomen der Röntgenbeugung und Röntgenfluoreszenz deren Zusammensetzung ermittelt.[40] Diese kann dann Aufschluss über wasserbezogene Einflüsse und eventuelle biologische Signaturen geben. Entwickelt und gebaut wurde das Instrument vom Ames Research Center.
Die angelieferte Bodenprobe wird zuerst durch das CHIMRA Filtersystem geleitet, um zu große oder zu feine Bestandteile, die nicht für die Messung geeignet sind, auszusortieren. Partikel mit einer Größe von bis zu 150 µm werden anschließend gleichmäßig in eine Zelle mit einem Durchmesser von 8 mm geleitet.[40] Jede Zelle ist eine 175 µm dick, wobei die Probe zwischen zwei 6 µm dicke Mylar-Folien oder Kapton-Kunststoff gefüllt wird.[40] Insgesamt sind 27 wiederbefüllbare Zellen auf einem Drehrad angeordnet, so dass das Instrument zwischen mehreren Proben einfach hin- und herschalten kann. Zusätzlich sind noch fünf Zellen mit Referenzmaterial zur Kalibrierung des Instruments vorhanden.[40] Zur Analyse einer Probe wird deren Zelle vor der Röntgenquelle positioniert. Diese erzeugt die Strahlung durch den Effekt der Bremsstrahlung, die entsteht, wenn Elektronen, die aus einer kleinen Menge radioaktiver Cobalt-Isotope stammen, auf Silizium treffen. Die entstanden Röntgenphotonen werden dann in einen Strahl mit einem Durchmesser von etwa 50 µm konzentriert und auf die Probe gelenkt.[40]
Nachdem die Strahlung die Probe durchdrungen hat, wird diese durch einen UV-sensiblen CCD-Sensor mit 600 × 600 Pixeln gemessen.[40] Dieser analysiert Stärke und Brechung der Photonen, um so Spektren anzufertigen, die Aufschluss über die Zusammensetzung der Probe bieten. Der 40 × 40 µm große Sensor fertigt 224 Messungen pro Sekunde an und wird auf -60 °C heruntergekühlt, um eine möglichst hohe Empfindlichkeit zu erreichen.[40] Eine komplette Messung benötigt meist mehrere Stunden, um gute Ergebnisse zu produzieren.[40]
Sample Analysis at Mars (SAM)
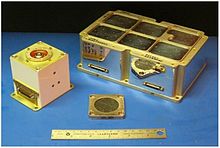
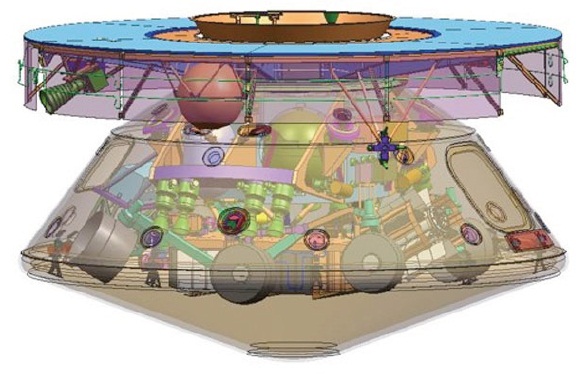
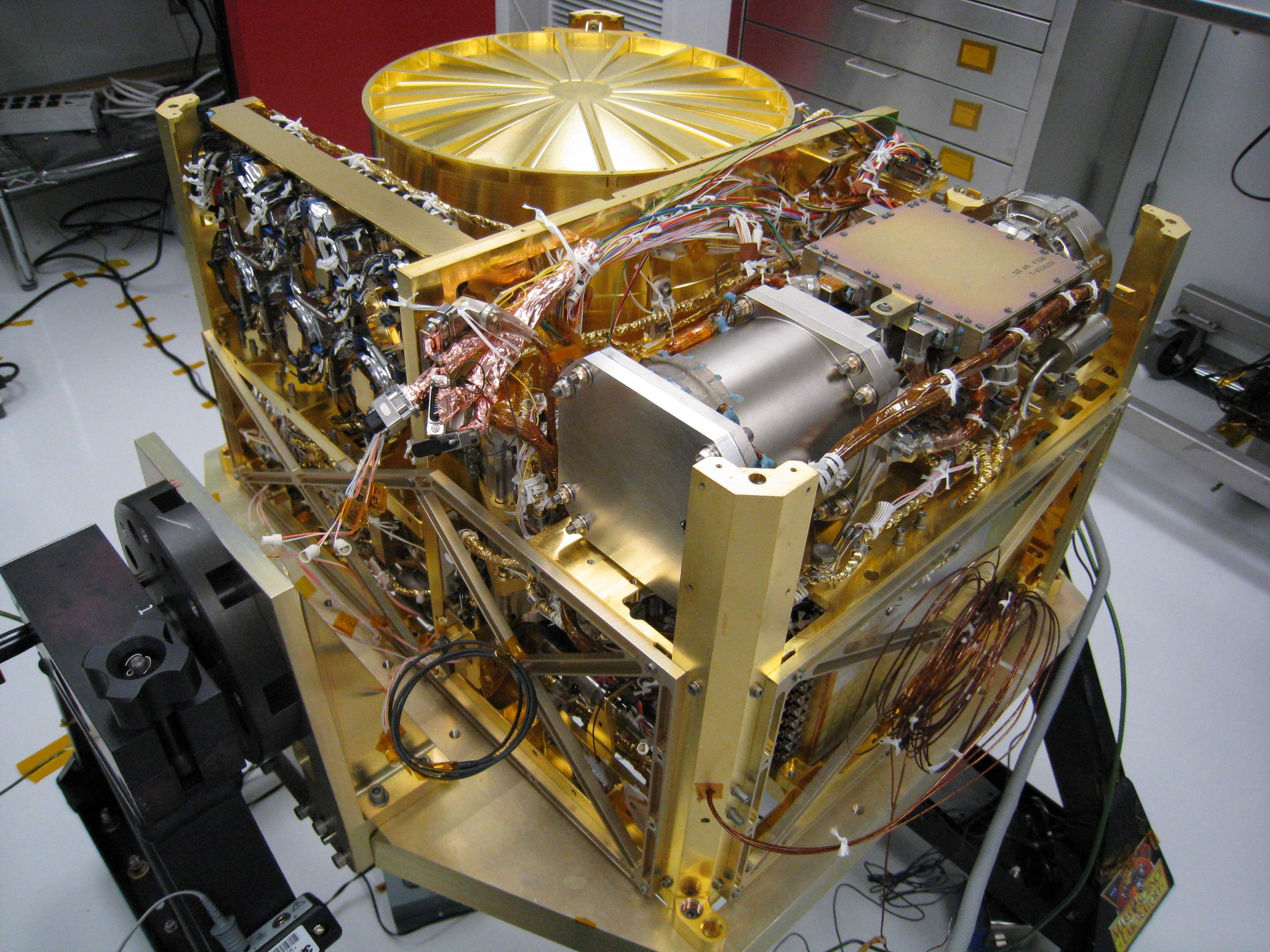
 Der SAM-Komplex (auf dem Kopf stehend). Hinten ist die Trommel des SMS zu sehen, links davon befinden sich die Kammern des Gaschromatographen. Unter diesen Teilen befindet sich der Einlass für Bodenproben, das CSPL und das QMS. Im Vordergrund befindet sich auf der oberen Ebene das TLS, auf der unteren die zentrale Elektronik.
Der SAM-Komplex (auf dem Kopf stehend). Hinten ist die Trommel des SMS zu sehen, links davon befinden sich die Kammern des Gaschromatographen. Unter diesen Teilen befindet sich der Einlass für Bodenproben, das CSPL und das QMS. Im Vordergrund befindet sich auf der oberen Ebene das TLS, auf der unteren die zentrale Elektronik.Beim SAM-Komplex handelt es sich um das schwerste und leistungsfähigste Instrument von Curiosity. Mit einem Gewicht von 38 kg beansprucht es etwa die Hälfte des gesamten Massenanteils für wissenschaftliche Nutzlast.[41] Mittels drei kombinierten Sensorsystemen soll es feststellen, inwieweit der Mars als Lebensraum geeignet war und heute ist.[42] Hierzu liegt der Fokus auf der Identifizierung und Analyse von organischen Verbindungen und leichten Elementen sowie der Bestimmung von Isotopenverhältnissen in der Atmposphäre.[42] Entwickelt und gebaut wurde es vom Goddard Space Flight Center, die Spitzenleistung kann bis zu 240 Watt betragen.[41]
Das SAM kann sowohl Bodenproben als auch Gas aus der Atmosphäre analysieren, wobei das Material zuvor erst aufbereitet werden muss.[43] Für Bodenproben ist dies das „Sample Manipulation System“ (SMS), dass über mehrere Siebe verfügt und das gefilterte Material anschließend in einen von 74 Auffangbehältern leitet.[43] Wenn flüchtige Stoffe aus der Probe entfernt werden sollen, kann diese anschließend in einem von insgesamt zwei Öfen erhitzt werden, wo dann eine Ausgasung stattfindet. Da in den Öfen, welche jeweils bis zu 40 Watt Strom verbrauchen, Temperaturen von bis zu 1100 °C erreicht werden, ist auch eine Pyrolyse von organischen Verbindungen möglich.[43] Das Gas aus diesem Prozess, oder auch eine Probe aus der Atmosphäre, wird anschließend in das „Chemical Separation and Processing Laboratory“ (CSPL) geleitet. Hierbei handelt es sich um ein sehr umfangreiches System zur weiteren Vorbereitung der Messung. Es besteht aus knapp 50 Ventilen, 16 Manifolds und mehreren Gas-Absorbern sowie vielfältige Misch- und Trennsystemen.[43]
Nach der Aufbereitungsphase kann das Gas in eines der drei Messinstrumente eingeleitet werden. Für die Untersuchung organischer Verbindungen eignet sich besonders der Gaschromatograph (GC).[43] Er besitzt sechs unterschiedliche Kammern, die jeweils auf eine bestimmte Untergruppe von organischen Verbindungen spezialisiert sind. Somit kann das Instrument deren Verteilung in der Probe genau bestimmen. Zur weiteren Analyse kann das Gas dann an das „Tunable Laser Spectrometer“ (TLS), vor allem aber an das „Quadrupole Mass Spectrometer“ (QMS) weitergeleitet werden. Bei letzterem handelt es sich um ein Quadrupol-Massenspektrometer, das die Komponenten des Gases anhand ihrer Masse nochmals trennt, um die Messung weiterzuverbessern.[43] Der Messbereich erstreckt sich hierbei auf Elemente und Moleküle mit einer Atommasse von 2 bis 535 u.[43] Für Messungen der Verbindungen Wasser, Methan und Kohlenstoffdioxid kommt alternativ das Tunable Laser Spectrometer zum Einsatz. Es zeichnet sich durch eine sehr hohe Empfindlichkeit für diese Stoffe aus und kann darüber hinaus auch deren interne Isotopenverteilung bestimmen.[43]
Radiation Assessment Detector (RAD)
 Das RAD-Instrument (Öffnung versiegelt)
Das RAD-Instrument (Öffnung versiegelt)Das „Radiation Assessment Detector“-Instrument ist für die Messung von kosmischer Strahlung auf der Marsoberfläche entwickelt worden. Der Messbereich ist sehr breitgefächert, so dass erstmals die gesamte Strahlendosis für einen Menschen auf dem Mars ermittelt werden kann, was für spätere bemannte Marsmissionen von großer Bedeutung ist.[22] Auch für Hypothesen zu Leben auf dem Mars sind die Daten zur Strahlungsdosis ein wichtiger Parameter. Darüber hinaus können auch Teilchenschauer genau vermessen werden, wodurch sich aktuelle Modelle zum Aufbau der Marsatmosphäre besser überprüfen lassen.[22] Das Instrument ist im zentralen Chassis untergebracht, wiegt 1,56 kg[44] und benötigt 4,2 Watt el. Leistung.[45] Entwickelt wurde es in einem Gemeinschaftsprojekt des Southwest Research Institute, der Christian-Albrechts-Universität zu Kiel und dem Deutschen Zentrum für Luft- und Raumfahrt.
Die Öffnung des Instruments zeigt exakt nach oben und besitzt ein Gesichtsfeld von 65° zum Einfangen von Teilchen. Gemessen wird mittels drei siliziumbasierter Sensoren mit PIN-Dioden, einem Caesiumiodid-Szintillator und einem plastikbasierten Szintillator speziell für Neutronen. Diese Komponenten befinden sich im Zylinderteil des Instruments, die Elektronik zur Signalverarbeitung befindet sich im unteren Teil des Instruments (im Bild rechts goldfarben). Der Messbereich des RAD-Instruments für leichte Ionen (Z > 9) und Protonen erstreckt sich von 5 bis etwa 1300 MeV pro Nukleon, schwerere Ionen (bis Z = 26) können erst ab 10 MeV detektiert werden. Neutronen sind im Bereich von 5 bis 100 MeV messbar, Gammastrahlung zwischen 0,7 und 5 MeV. Elektronen und Positronen sind ab 0,2 MeV detektierbar, die Obergrenze liegt für Elektronen bei 100, für Positronen bereits bei einem MeV. Meist können die Teilchen direkt gemessen werden, bei Ionen, Protonen und Elektronen kann die Messung ab einer Energie von etwa 120 MeV jedoch auch indirekt über den Compton-Effekt erfolgen. Aufgrund der begrenzten Energiereserven des Rovers soll das RAD pro Stunde nur 15 Minuten betrieben werden.
Mars Descent Imager (MARDI)
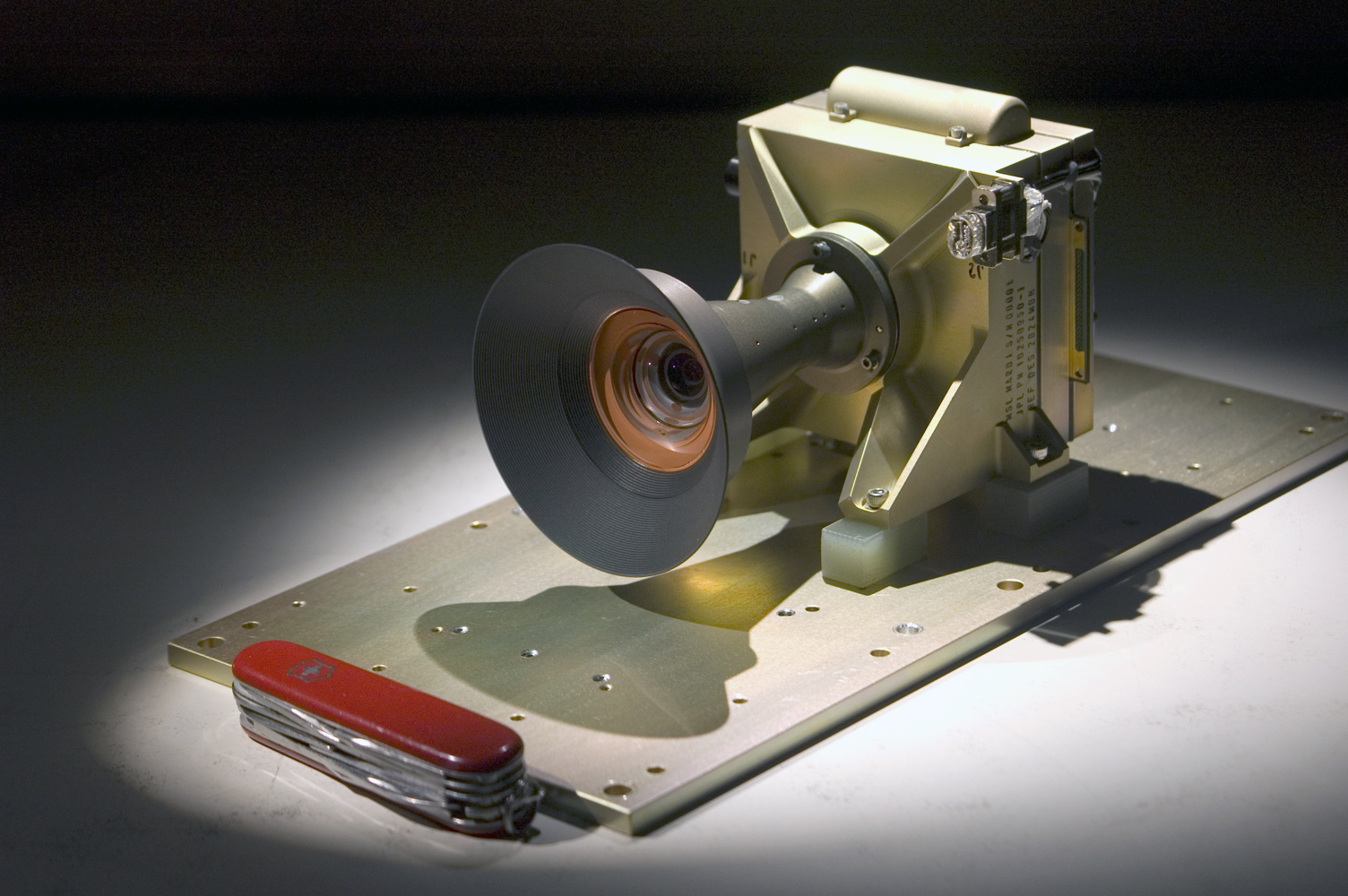
 Die MARDI-Kamera im Vergleich zu einem Taschenmesser
Die MARDI-Kamera im Vergleich zu einem TaschenmesserBei dem „Mars Descent Imager“ handelt es sich um eine hochauflösende Kamera, die während er letzten Abstiegsphase (unter 4 km Höhe) Bilder der Landezone anfertigt. Hierdurch soll der genaue Landeort bestimmt und die unmittelbare Umgebung mit hoher Genauigkeit vermessen werden.[46] Das Instrument ist vorne links am zentralen Rover-Chassis angebracht und blickt exakt nach unten. Der Bayer-Bildsensor besitzt 1600 × 1200 Pixel und erreicht, je nach Höhe, eine Auflösung von 2500 bis 0,33 Zentimeter pro Pixel, wobei etwa fünf Bilder pro Sekunde gemacht werden können.[46] MARDI wurde von Malin Space Science Systems gebaut, wiegt 0,66 kg und benötigt bis zu 10 Watt el. Leistung.
Der Sichtbereich der Optik beträgt 90°; allerdings wird nur ein Feld von 70° × 50° abgebildet, wobei die längere Seite parallel zur Flugrichtung verläuft.[46] Da die Daten aufgrund der geringen Kommunikationsbandbreite nicht sofort übertragen werden können, ist ein 8 GB großer Zwischenspeicher vorhanden, der bis zu 4000 Rohbilder speichern kann.[46] Mit Hilfe der hochauflösenden Bilder des MARDI-Instrumentes soll auch der Inertialsensor des Rovers auf seine Genauigkeit hin geprüft werden. Dies geschieht durch den Vergleich der Bewegungsmessung des Sensors mit der Bildverschiebung zwischen zwei Aufnahmen der Kamera.[46]
Alpha Particle X-ray Spectrometer (APXS)
 Der Sensorkopf (links) und die Elektronik (rechts) des APXS
Der Sensorkopf (links) und die Elektronik (rechts) des APXSDas „Alpha Particle X-ray Spectrometer“ (kurz APXS) ist ein Alphapartikel-Röntgenspektrometer, das nach dem Prinzip der Röntgenfluoreszenzanalyse und Partikel-induzierte Röntgenemission arbeitet. Der Sensor ist am Arm der Curiosity befestigt und benötigt einen sehr nahen Kontakt zum Boden. Dessen Elemente werden mittels der abgestrahlten Radioaktivität einer kleinen Menge Curium-244, das sich am "Kopf" des Instruments befindet, in einen angeregten Zustand gebracht.[47] Diese senden dann Röntgenstrahlung aus, die von einem Detektor aufgefangen werden. Auf diese Weise kann eine Vielzahl von Elementen identifiziert werden und deren Anteil in der Probe erfasst werden. Das APXS soll so die geologische Umgebung des Rovers erkunden und die Prozesse erforschen, die den Boden und das Felsgestein geformt haben. Das Spektrometer ist hierbei besonders im Bereich von salzformenden Elementen wie Calcium oder Brom hochempfindlich.[47] Das APXS wurde von der Canadian Space Agency finanziert und von MDA Space Missions gebaut.
Das Spektrometer des Instruments kann im Röntgenspektrum von 1 bis 25 keV Messungen vornehmen, wobei eine Auflösung von bis zu 150 eV erreicht wird.[47] Diese Auflösung wird aber nur bei einer Detektortemperatur von unter -45 °C erreicht, weshalb ein Peltier-Element zur Kühlung vorhanden ist.[47] Die Analysezeit reicht von 10 Minuten bis 3 Stunden, je nach gewünschter Empfindlichkeit (der Masseanteil von bestimmten Elementen kann mit einer Genauigkeit von bis zu 10 ppm bestimmt werden).[47] Während der Messung wird eine Kreisfläche mit einem Durchmesser von 1,7 cm bestrahlt, wobei das Instrument leichte Elemente bis in Tiefen von 5 Mikrometer, schwere Elemente bis 50 Mikrometer registrieren kann.[47] Unabhängig von der Dauer der Messung liefert das Instrument am Ende der Analyse 32 kB Daten.
Mars Hand Lens Imager (MAHLI)
 Der MAHLI-Kamerakopf im Vergleich zu einem 9 cm langen Taschenmesser.
Der MAHLI-Kamerakopf im Vergleich zu einem 9 cm langen Taschenmesser.Bei dem „Mars Hand Lens Imager“ (MAHLI) handelt es sich um eine hochauflösende Kamera am vorderen Ende des Arms von Curiosity. Er dient als eine Art Mikroskop und ist zur optischen Untersuchung von sehr kleinen Strukturen gedacht. Der 1600 × 1200 Pixel leistende CCD-Sensor, der von Kodak stammt, kann bei maximaler Annäherung (25 mm Abstand zur Probe) Strukturen mit einer Genauigkeit von bis zu 15 Mikrometer pro Pixel auflösen.[48] An dem Kameragehäuse sind auch mehrere LEDs vorhanden, so dass auch in der Nacht Aufnahmen gemacht werden können. Wie bei der MastCam können auch 720p-Videos mit etwa sieben Bildern pro Sekunde aufgenommen werden.[48] MAHLI wurde von Malin Space Science Systems entwickelt und gebaut.
Der CCD-Chip ist als Bayer-Sensor ausgeführt und erreicht eine Quantenausbeute von 30 bis 40 Prozent, je nach Wellenlänge.[48] Die aktive Fläche beläuft sich auf 105 mm², inklusive Sockel misst die komplette Fotoelektronik 20 mm in der Breite und 33 mm in der Länge.[48] Die Belichtungszeit kann zwischen 0,005 bis 2 Sekunden gewählt werden. Neben den zwei Paaren von LEDs, die im Bereich des sichtbaren Lichtes arbeiten, sind auch zwei Exemplare für UV-Licht (365 nm) vorhanden, um im Ultraviolettspektrum fluoreszenzierende Stoffe zu erkennen.[48]
Dynamic Albedo of Neutrons (DAN)
Mit Hilfe des „Dynamic Albedo of Neutrons“-Instruments soll die Verteilung von wasserstoffhaltigen Verbindungen im Marsboden in einer Tiefe von bis zu einem Meter ermittelt werden.[49] Hierzu wird der Boden zuerst mit Neutronen beschossen, um dann das energetische Profil der zurückgestreuten Teilchen zu messen. Dieses Verfahren zum Auffinden von Wasserstoff wird bereits auf der Erde vielfach angewandt, an Bord von Curiosity wird es aber erstmals auf einem anderen Himmelskörper eingesetzt.[49] Das Instrument befindet sich am Heck des Rovers, wiegt knapp 5 kg und wird von Russland bereitgestellt.
Für die Messungen sind zwei getrennte Module verantwortlich: Das DAN-DE enthält die Steuerelektronik und die Sensoren, während das DAN-PNG auf Kommando freie Neutronen mittels der Reaktion 3H + 2H → 4He + n abstrahlt.[49] Bei jedem 1 µs-Puls werden etwa 10 Millionen Neutronen mit einer Energie von 14 MeV pro Teilchen in den Boden abgestrahlt. Die zurückgestreuten Neutronen werden anschließend von zwei He3-basierten Sensoren vermessen. Beide Modelle sind identisch aufgebaut, einer besitzt lediglich eine zusätzliche Cadmium-Abschirmung, um Neutronen mit einer Energie von weniger als 0,2 eV zu blockieren.[49] Beide Sensoren weisen dieselbe Messobergrenze von 1 eV auf. Das DAN-Instrument kann während der Fahrt als auch bei Stillstand Messungen vornehmen, wobei deren Dauer in letzterem Fall je nach gewünschter Genauigkeit zwischen 2 und 30 Minuten liegt.[49] Die vertikale Wasserstoffverteilung kann mit einer Auflösung von bis zu 10 cm bestimmt werden, in der horizontalen Ebene sind je nach Bewegungsprofil des Rovers Auflösungen von 50 bis 100 m die Regel.[49]
Verweise
Weblinks
 Commons: Mars Science Laboratory – Sammlung von Bildern, Videos und Audiodateien
Commons: Mars Science Laboratory – Sammlung von Bildern, Videos und AudiodateienEinzelnachweise
- ↑ a b c d e Spacecraft Summary. JPL, abgerufen am 10. April 2011.
- ↑ EMCORE PhotoVoltaics Awarded Mars Cruise Stage Solar Panel Manufacturing Contract from NASA's Jet Propulsion Laboratory (JPL). EMCORE Corporation, 28. April 2007, abgerufen am 10. April 2011.
- ↑ a b c d e Mars Science Laboratory: Cruise Configuration. JPL, abgerufen am 10. April 2011.
- ↑ a b 2011 Thermoelectrics Applications Workshop. JPL, abgerufen am 10. April 2011.
- ↑ a b c d e f g h i j k l m n o p q r s t u v w x y z aa ab ac ad ae af ag ah ai aj ak Andre Makovsky, Peter Ilott, Jim Taylor: Mars Science Laboratory Telecommunications System Design. In: Deep Space Communications and Navigation Systems. JPL, November 2009, abgerufen am 9. April 2011 (PDF, englisch).
- ↑ a b c d Mars Science Laboratory Aeroshell (MSL). Lockheed Martin, abgerufen am 10. April 2011.
- ↑ a b Paul B. Brugarolas, A. Miguel San Martin, Edward C. Wong: The RCS attitude controller for the exo-atmospheric and guided entry phases of the Mars Science Laboratory. California Institute of Technology, 2010, abgerufen am 4. Juni 2011.
- ↑ a b Mars Science Laboratory Parachute Qualification Testing. JPL, abgerufen am 7. Mai 2011.
- ↑ a b c d e MSL Science Corner: MSL EDL Instrument (MEDLI) Suite. JPL, abgerufen am 11. Juni 2011.
- ↑ NASA: Final Minutes of Curiosity's Arrival at Mars. Abgerufen am 18. Oktober 2011.
- ↑ a b c d e f g h i j Miguel San Marti: The MSL SkyCrane Landing Architecture - A GN&C Perspective. JPL, Juni 2010, abgerufen am 7. Mai 2011 (PDF, englisch).
- ↑ [http://marsoweb.nas.nasa.gov/landingsites/msl/memoranda/MSL_overview_LS.pdf NASA’s 2009 Mars Science Laboratory.] JPL, abgerufen am 5. Juni 2011.
- ↑ Pathfinder Mars Mission – Sojourner mini-rover. _, abgerufen am 5. Juni 2011.
- ↑ Mars Exploration Rover Telecommunications. JPL, abgerufen am 5. Juni 2011.
- ↑ The Robot Hall of Fame: Mars Pathfinder Sojourner Rover. robothalloffame.org, abgerufen am 5. Juni 2011.
- ↑ a b Mission - Power. NASA/JPL, abgerufen am 15. März 2011.
- ↑ a b Space Radioisotope Power Systems - Multi-Mission Radioisotope Thermoelectric Generator. U.S. Department of Energy, abgerufen am 15. März 2011.
- ↑ a b Fred Ritz, Craig E.: Multi-Mission Radioisotope Thermoelectric Generator (MMRTG) Program Overview. Boeing, JPL, S. 2-3, abgerufen am 15. März 2011.
- ↑ Boeing To Build Space-borne Power Generator. spacedaily.com, abgerufen am 15. März 2011.
- ↑ a b c NASA – Advanced Radioisotope Power Conversion Technology Research and Development, Seite 6, Dezember 2004. Zugriff am 29. August 2009
- ↑ Bernd Leitenberger: Die Radioisotopenelemente an Bord von Raumsonden, abgerufen: 8. April 2011
- ↑ a b c d Mars Science Laboratory - Launch Nuclear Safety. NASA, abgerufen am 7. Mai 2011.
- ↑ William J. Yalen: Advanced Lithium-Ion Battery Applications & Materials Considerations. Yardney Technical Products, Inc., 19. Juni 2009, S. 33, abgerufen am 8. Mai 2011.
- ↑ Max Bajracharya, Mark W. Maimone, Daniel Helmick: Autonomy for Mars Rovers: Past, Present, and Future. Computer, S. 2 (45), abgerufen am 18. April 2011.
- ↑ a b c RAD750 radiation-hardened PowerPC microprocessor. BAE Systems, abgerufen am 18. April 2011.
- ↑ Mars Science Laboratory: Brains. JPL, abgerufen am 18. April 2011.
- ↑ a b Klaus Havelund, Alex Groce, Margaret Smith, Howard Barringer: Monitoring the Execution of Space Craft Flight Software. JPL, 2009, S. 6, abgerufen am 18. April 2011.
- ↑ Building Curiosity: Rover Rocks Rocker-Bogie. JPL, abgerufen am 19. April 2011.
- ↑ Frequently Asked Questions. JPL, abgerufen am 20. April 2011.
- ↑ Fuk Li: Status of Mars Science Laboratory. JPL, September 2009, abgerufen am 22. April 2011.
- ↑ a b c Mars Science Laboratory: Wheels and Legs. JPL, abgerufen am 20. April 2011.
- ↑ a b NASA’s 2009 Mars Science Laboratory. JPL, S. 5, abgerufen am 20. April 2011.
- ↑ a b c d Avi B. Okon: Mars Science Laboratory Drill. In: Proceedings of the 40th Aerospace Mechanisms Symposium, NASA Kennedy Space Center, May 12-14, 2010. Mai 2010, abgerufen am 11. August 2011 (pdf, englisch).
- ↑ a b c MSL Science Corner: Sampling System. JPL, abgerufen am 14. August 2011.
- ↑ a b c P. G. Conrad, J. E. Eigenbrode, C. T. Mogensen , M. O. Von der Heydt, D. P. Glavin, P. M. Mahaffy and J. A. Johnson: The Mars Science Laboratory Organic Check Material. In: 42nd Lunar and Planetary Science Conference (2011). 2011, abgerufen am 14. August 2011 (pdf, englisch).
- ↑ a b c d e f g MSL Science Corner: Mast Camera (MastCam). JPL, abgerufen am 22. April 2011.
- ↑ a b c d e f g h i MSL Science Corner: Chemistry & Camera (ChemCam). JPL, abgerufen am 22. April 2011.
- ↑ a b c d e f g h Rover Environmental Monitoring Station for MSL mission. In: 4th International workshop on the Mars Atmosphere: modelling and observations. Universität Pierre und Marie Curie, Februar 2011, abgerufen am 11. Juni 2011.
- ↑ a b c d e f g h Chemistry & Mineralogy (CheMin). JPL, abgerufen am 13. Mai 2011.
- ↑ a b SPRL's current projects - Sample Analysis at Mars. SPRL, abgerufen am 4. Juni 2011.
- ↑ a b MSL Science Corner: Sample Analysis at Mars (SAM). JPL, abgerufen am 4. Juni 2011.
- ↑ a b c d e f g h Paul Mahaffy: The Sample Analysis at Mars Suite and it's Methane Relevant Investigations. NASA Goddard Space Flight Center, November 2009, abgerufen am 4. Juni 2011 (PDF, englisch).
- ↑ The Radiation Assessment Detector (RAD) on the Mars Science Laboratory (MSL). In: 40th Lunar and Planetary Science Conference (2009). Lunar and Planetary Insitute, abgerufen am 5. Juni 2011.
- ↑ Calibration of the Radiation Assessment Detector (RAD) for MSL. Southwest Research Institute, abgerufen am 5. Juni 2011.
- ↑ a b c d e MSL Science Corner: Mars Descent Imager (MARDI). JPL, abgerufen am 9. Juni 2011.
- ↑ a b c d e f Alpha Particle X-ray Spectrometer (APXS). JPL, abgerufen am 7. Mai 2011.
- ↑ a b c d e Mars Hand Lens Imager (MAHLI). JPL, abgerufen am 7. Mai 2011.
- ↑ a b c d e f Investigation of Dynamic Albedo of Neutrons (DAN) on MSL. NASA, abgerufen am 11. Juni 2011.
 Marssonden
Marssonden„Mars“-Raumsonden (1960–1973) | Mariner 3,4,6–9 (1964–1971) | Zond 2 (1964) | Viking (1975) | Fobos (1988) | Mars Observer (1993) | Mars Global Surveyor (1996) | Mars 96 (1996) | Mars Pathfinder (1996) | Nozomi (1998) | Mars Climate Orbiter (1998) | Mars Polar Lander mit Deep Space 2 (1999) | 2001 Mars Odyssey (2001) | Mars Express mit Beagle 2 (2003) | Mars Exploration Rover (2003) mit Spirit (2003) und Opportunity (2003) | Mars Reconnaissance Orbiter (2005) | Phoenix (2007) | Fobos-Grunt (2011) | Yinghuo-1 (2011) | Curiosity Rover (2011) | MAVEN (2013) | ExoMars Trace Gas Orbiter (2016) | ExoMars Rover (2018) | Mars Sample Return (nicht vor 2018)
Kursiv geschriebene Missionen sind aktiv.
Gestrichene Missionen: Mars Surveyor 2001 | Mars Telecommunications Orbiter | Mars Science and Telecommunications Orbiter (2011 oder 2013)
(Siehe auch: Mars | Liste der künstlichen Objekte auf dem Mars | Chronologie der Mars-Missionen | Bemannter Marsflug | Aurora-Programm)
Wikimedia Foundation.
Schlagen Sie auch in anderen Wörterbüchern nach:
Mars Science Laboratory — mission 2011 concept artwork Operator NASA Major contractors Boeing Lockheed Martin … Wikipedia
Mars Science Laboratory — Vue d artiste du rover MSL. Caractéristiques Organ … Wikipédia en Français
Mars Science Laboratory — Кьюриосити Mars Science Laboratory … Википедия
Mars Science Laboratory — Este artículo o sección se refiere o está relacionado con un vuelo espacial futuro. La información de este artículo puede cambiar frecuentemente. Por favor, no agregues datos especulativos y recuerda colocar referencias a fuentes fiables para dar … Wikipedia Español
Mars Science Laboratory — Марсоход NASA Космическая непилотируемая миссия NASA по доставке планетохода третьего поколения Curiosity на Марс. Ракета с марсоходом и спускаемым модулем стартовала в ноябре 2011 года, 6 августа 2012 года планетоход был успешно доставлен на… … Энциклопедия ньюсмейкеров
Geschichte und Missionsverlauf des Mars Science Laboratory — Diese Seite behandelt die Geschichte und den Missionsverlauf des Mars Science Laboratory (MSL) und Curiositys. Technische Details finden sich im entsprechenden Hauptartikel. Inhaltsverzeichnis 1 Missionsziele 2 Missionsverlauf 2.1 Start (geplant) … Deutsch Wikipedia
Fluid Science Laboratory — The Fluid Science Laboratory is a European (ESA s) science payload designed for use in Columbus built by Alenia Aeronautica Spazio and OHB System. It is a multi user facility for conducting fluid physics research in microgravity conditions. It… … Wikipedia
Mars Reconnaissance Orbiter — Conceptual image depicting the Mars Reconnaissance Orbiter in an elliptical low planet orbit around Mars Operator NASA / JPL Major contractors Lockheed Ma … Wikipedia
Mars Pathfinder — Pathfinder and Sojourner at JPL in October 1996 Operator NASA – JPL Mission type Lander, rover … Wikipedia
Mars Astrobiology Explorer-Cacher — Operator NASA Mission type Rover Launch vehicle Atlas V … Wikipedia
Mars Science Laboratory














18+
© Academic, 2000-2026
- Kontaktieren Sie uns: Unterstützung, Werbung
Wörterbücher Export, schritte mit PHP, Joomla, Drupal, WordPress, MODx.