- Lineare Gleichung
-
Eine lineare Gleichung ist eine mathematische Bestimmungsgleichung, in der ausschließlich Linearkombinationen der Unbekannten vorkommen. Typischerweise sind die Unbekannten einer linearen Gleichung Skalare, meist reelle Zahlen. Im einfachsten Fall einer skalaren Unbekannten x besitzt eine lineare Gleichung die Form
wobei a und b Konstanten sind. Es gibt aber auch lineare Gleichungen mit mehreren Unbekannten und mit anderen mathematischen Objekten als Unbekannten, beispielsweise Folgen (lineare Differenzengleichungen), Vektoren (lineare Gleichungssysteme) oder Funktionen (lineare Differentialgleichungen). Im allgemeinen Fall besitzt eine lineare Gleichung die Form
- T(x) = b
wobei T ein linearer Operator ist.
Homogene lineare Gleichungen sind spezielle lineare Gleichungen, bei denen der konstante Term b der Gleichung gleich Null ist. Die Lösungen einer homogenen linearen Gleichung bilden einen Untervektorraum des Vektorraums der Unbekannten und besitzen damit besondere Eigenschaften, wie die Gültigkeit des Superpositionspinzips. Die Lösungen einer inhomogenen linearen Gleichung bilden hingegen einen affinen Unterraum, so lässt sich jede Lösung einer inhomogenen linearen Gleichung als Summe der Lösung der zugehörigen homogenen Gleichung und einer Partikulärlösung darstellen. Der Lösungsraum einer linearen Gleichung kann über den Kern und den Kokern der linearen Abbildung charakterisiert werden.
Lineare Gleichungen und deren Lösungen werden insbesondere in der Linearen Algebra und der Linearen Funktionalanalysis studiert, sie spielen aber auch in der Zahlentheorie eine Rolle.
Inhaltsverzeichnis
Skalare lineare Gleichungen
Häufig sind die Unbekannten bei linearen Gleichungen Skalare (meist reelle oder komplexe Zahlen). Solche lineare Gleichungen sind dann spezielle algebraische Gleichungen vom Grad 1.
Lineare Gleichungen mit einer Unbekannten
Eine skalare Gleichung mit einer Unbekannten x heißt linear, wenn sie durch Äquivalenzumformungen in die Form
gebracht werden kann. Hierbei sind a und b Konstanten, die nicht von x abhängen.
Ist
 , kann der Wert der Unbekannten x, mit dem die Gleichung erfüllt ist, bestimmt werden, indem auf beiden Seiten durch a geteilt wird:
, kann der Wert der Unbekannten x, mit dem die Gleichung erfüllt ist, bestimmt werden, indem auf beiden Seiten durch a geteilt wird:Falls a = 0 und
 sind, besitzt die Gleichung keine Lösung. Falls a = 0 und b = 0 sind, gibt es unendlich viele Lösungen, also jedes x erfüllt die Gleichung.
sind, besitzt die Gleichung keine Lösung. Falls a = 0 und b = 0 sind, gibt es unendlich viele Lösungen, also jedes x erfüllt die Gleichung.- Beispiele
Um die lineare Gleichung
zu lösen bringt man sie zunächst durch Äquivalenzumformungen in obige Normalform. Hierzu sammelt man alle Terme mit der Unbekannten x auf der linken Seite und alle anderen Terme auf der rechten Seite. Dazu addiert man auf beiden Seiten die Zahl 9, was
ergibt, und subtrahiert von beiden Seiten den Term
 , wodurch man die Normalform
, wodurch man die Normalformerhält. Nun dividiert man beide Seiten durch 3, sodass auf der linken Seite nur noch die Unbekannte x übrig bleibt, und es ergibt sich als Lösung
Die lineare Gleichung
besitzt keine Lösung, während die lineare Gleichung
für jedes x erfüllt wird.
Lineare Gleichungen mit zwei Unbekannten
 Die Lösungsmenge der linearen Gleichung
Die Lösungsmenge der linearen Gleichung

Eine skalare Gleichung mit zwei Unbekannten x und y heißt linear, wenn sie durch Äquivalenzumformungen in die Form
gebracht werden kann, wobei a, b und c Konstanten sind. Die Lösungen bilden Geraden im zweidimensionalen Raum, sofern nicht sowohl a = 0, als auch b = 0 sind. Andernfalls ist die Lösungsmenge entweder der ganze zweidimensionale Raum (c = 0) oder leer
 .
.Die Lösung einer solchen Gleichung wird oft in Parameterdarstellung angegeben. Hierzu löst man die Gleichung nach einer der Unbekannten auf, beispielsweise y, was sofern
ergibt, und fasst die andere Unbekannte x als freien Parameter t auf. Damit kann man die Lösung als
 und
und  mit
mit 
schreiben. Auf diese Weise wird sichtbar, dass, obwohl die Gleichung zwei Unbekannte enthält, der Lösungsraum nur eindimensional ist, also lediglich von einem Parameter t abhängt. Die Parameterdarstellung selbst ist nicht eindeutig. Ist
kann man die Gleichung auch nach x auflösen und y als freien Parameter wählen. Auch andere Parametrisierungen sind möglich, dennoch wird durch sie die gleiche Lösungsmenge beschrieben.- Beispiel
Die Lösungsmenge für die lineare Gleichung
ist durch Auflösen nach y als
- und
 mit
mit 
gegeben. Den Funktionsgraph der beschriebenen Gerade erhält man dann über die Geradengleichung
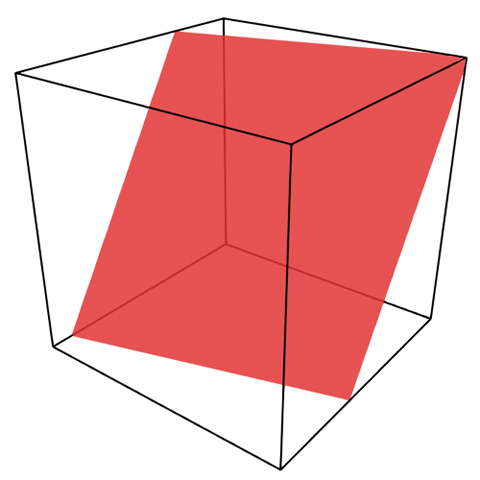
Lineare Gleichungen mit mehreren Unbekannten
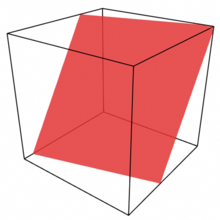 Die Lösung einer reellen linearen Gleichung mit drei Unbekannten ist im allgemeinen eine Ebene
Die Lösung einer reellen linearen Gleichung mit drei Unbekannten ist im allgemeinen eine EbeneAllgemein heißt eine skalare Gleichung mit n Unbekannten
 linear, wenn sie durch Äquivalenzumformungen in die Form
linear, wenn sie durch Äquivalenzumformungen in die Formgebracht werden kann, wobei
 und b Konstanten sind. Es dürfen also ausschließlich Linearkombinationen der Unbekannten auftreten. Die Lösungen solcher Gleichungen sind im allgemeinen (n − 1)-dimensionale Teilmengen (Hyperebenen) des zugehörigen n-dimensionalen Raums. Falls
und b Konstanten sind. Es dürfen also ausschließlich Linearkombinationen der Unbekannten auftreten. Die Lösungen solcher Gleichungen sind im allgemeinen (n − 1)-dimensionale Teilmengen (Hyperebenen) des zugehörigen n-dimensionalen Raums. Falls  ist die Lösungsmenge entweder der ganze n-dimensionale Raum (b = 0) oder leer
ist die Lösungsmenge entweder der ganze n-dimensionale Raum (b = 0) oder leer  .
.Die Parameterdarstellung der Lösungsmenge erhält man im allgemeinen Fall wiederum dadurch, dass man die Gleichung nach einer der Unbekannten, beispielsweise xn wenn
 , auflöst,
, auflöst,und die anderen Unbekannten als freie Parameter t1 bis tn − 1 auffasst. Damit ist die Lösungsmenge gegeben als
 mit
mit 
Dadurch, dass n − 1 Parameter frei wählbar sind, ist der Lösungsraum (n − 1)-dimensional. Auch hier ist die Parameterdarstellung nicht eindeutig, man kann die Gleichung auch nach einer der anderen Unbekannten, sofern der zugehörige Koeffizient ungleich Null ist, auflösen oder eine andere Parametrisierung wählen.
- Beispiel
Die Lösungsmenge der linearen Gleichung mit drei Unbekannten
ist eine Ebene im dreidimensionalen Raum mit Darstellung
 mit
mit 
Allgemeine lineare Gleichungen
Lineare Operatoren
Allgemein werden lineare Gleichungen über lineare Operatoren definiert. Eine Gleichung der Form
heißt dabei linear, wenn T ein linearer Operator ist und wenn b unabhängig von x ist. Der Operator
 bildet dabei von einem Vektorraum V in einen Vektorraum W ab, wobei
bildet dabei von einem Vektorraum V in einen Vektorraum W ab, wobei  und
und  sind. Beide Vektorräume sind dabei über einem gemeinsamen Körper K definiert. Ein Operator ist linear, wenn für Konstanten
sind. Beide Vektorräume sind dabei über einem gemeinsamen Körper K definiert. Ein Operator ist linear, wenn für Konstanten 
gilt.
- Beispiel
Ist
 und
und  , dann ist
, dann ist  ein reeller Vektor und
ein reeller Vektor und  eine reelle Zahl. Wählt man nun für T das lineare Funktional
eine reelle Zahl. Wählt man nun für T das lineare Funktionalmit konstantem Vektor
 , wobei
, wobei  das Skalarprodukt der beiden Vektoren ist, dann erhält man die lineare Vektorgleichung
das Skalarprodukt der beiden Vektoren ist, dann erhält man die lineare Vektorgleichungwelche äquivalent zur obigen skalaren linearen Gleichung mit n Unbekannten ist. Die Linearität von T folgt dabei direkt aus der Linearität der Skalarmultiplikation
Homogenität
 Eine homogene und eine inhomogene skalare lineare Gleichung mit zwei Unbekannten
Eine homogene und eine inhomogene skalare lineare Gleichung mit zwei Unbekannten und
und 
Eine lineare Gleichung heißt homogen, falls b = 0 ist, also wenn sie die Form
besitzt, ansonsten heißt eine lineare Gleichung inhomogen. Homogene lineare Gleichungen besitzen mindestens die triviale Lösung
da
gilt. Umgekehrt werden inhomogene lineare Gleichungen nie durch die triviale Lösung erfüllt.
- Beispiel
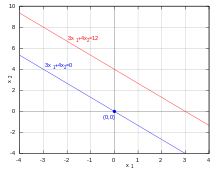
Die Lösung der homogenen linearen Gleichung mit zwei Unbekannten x1 und x2
ist eine Gerade im zweidimensionalen Raum, die durch den Nullpunkt geht. Die Lösung der inhomogenen Gleichung
ist eine dazu parallele Gerade, die aber nicht den Nullpunkt enthält.
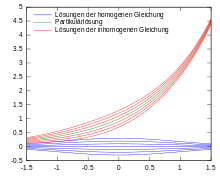
Superposition
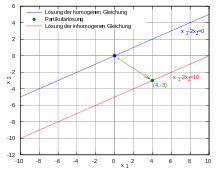 Superpositionsprinzip bei der linearen Gleichung
Superpositionsprinzip bei der linearen Gleichung : Lösung der homogenen Gleichung (blau), Partikulärlösung (grün) und Lösung der inhomogenen Gleichung (rot)
: Lösung der homogenen Gleichung (blau), Partikulärlösung (grün) und Lösung der inhomogenen Gleichung (rot)Homogene lineare Gleichungen besitzen die Superpositionseigenschaft: seien
 und
und  zwei Lösungen einer homogenen linearen Gleichung, dann ist auch
zwei Lösungen einer homogenen linearen Gleichung, dann ist auch  eine Lösung dieser Gleichung. Allgemein gilt sogar, dass alle Linearkombinationen
eine Lösung dieser Gleichung. Allgemein gilt sogar, dass alle Linearkombinationen  von Lösungen einer homogenen linearen Gleichung mit Konstanten c und d diese Gleichung lösen, da
von Lösungen einer homogenen linearen Gleichung mit Konstanten c und d diese Gleichung lösen, dagilt. Durch die Einbeziehung von x = 0 und die Superpositionseigenschaft bilden die Lösungen einer homogenen linearen Gleichung einen Untervektorraum von V.
Weiterhin lässt sich die Lösung einer inhomogenen Gleichung als Summe der Lösung der zugehörigen homogenen Gleichung und einer Partikulärlösung darstellen: sei
eine konkrete Lösung einer inhomogenen linearen Gleichung und sei y die allgemeine Lösung des zugehörigen homogenen Problems, dann ist  die allgemeine Lösung der inhomogenen Gleichung, da
die allgemeine Lösung der inhomogenen Gleichung, dagilt. Die Lösungen einer inhomogenen linearen Gleichung bilden damit einen affinen Unterraum über dem Vektorraum der zugehörigen homogenen Gleichung.
Umgekehrt gilt entsprechend: sind
und zwei Lösungen einer inhomogenen linearen Gleichung, dann löst  die zugehörige homogene Gleichung, da
die zugehörige homogene Gleichung, dagilt.
- Beispiel
Eine konkrete Lösung der inhomogenen Gleichung
ist
Sind nun y = (y1,y2) die Lösungen der zugehörigen homogenen Gleichung
 ,
,
also alle y mit y1 = 2y2, dann wird die inhomogene Gleichung allgemein gelöst durch
 mit
mit
Dimension des Lösungsraums
Der Lösungsraum einer homogenen linearen Gleichung wird als Kern ker(T) des linearen Operators bezeichnet, seine Dimension nennt man auch Defekt. Aufgrund des Rangsatzes gilt für die Dimension des Lösungsraums einer endlich-dimensionalen homogenen linearen Gleichung
- dim(ker(T)) = dim(V) − rang(T).
Dabei ist rang(T) der Rang des Operators, also die Dimension seines Bildes. Das Bild eines Operators ist die Menge der Werte, die T(x) für
annehmen kann.Aufgrund der Superpositionseigenschaft ist die Dimension des Lösungsraums einer inhomogenen linearen Gleichung gleich der der zugehörigen homogenen Gleichung, sofern eine Partikulärlösung existiert. Dies ist genau dann der Fall, wenn die rechte Seite b im Bild des Operators liegt, also
 gilt. Der Kokern des linearen Operators coker(T) = W / T(V) beschreibt gerade den Raum der Bedingungen, die die rechte Seite einer linearen Gleichung erfüllen muss, damit die Gleichung lösbar ist. Seine Dimension ist
gilt. Der Kokern des linearen Operators coker(T) = W / T(V) beschreibt gerade den Raum der Bedingungen, die die rechte Seite einer linearen Gleichung erfüllen muss, damit die Gleichung lösbar ist. Seine Dimension ist- dim(coker(T)) = dim(W) − rang(T).
- Beispiele
Wählt man als Vektorräume
 und , sowie als linearen Operator
und , sowie als linearen Operator- T(x) = a1x1 + a2x2 + a3x3,
wobei zumindest einer der Koeffizienten a1,a2,a3 ungleich Null sei, dann ist das Bild von T der ganze Raum W und somit
Der Lösungsraum der homogenen linearen Gleichung T(x) = 0 hat also Dimension 2 und ist eine Ebene im dreidimensionalen Raum. Auch der Lösungsraum der inhomogenen Gleichung T(x) = b ist hier eine Ebene, da die Gleichung, wenn beispielsweise
 ist, die Partikulärlösung (b / a1,0,0) besitzt. Der Kokern hat hier Dimension 0, die Gleichung ist also für beliebiges b lösbar.
ist, die Partikulärlösung (b / a1,0,0) besitzt. Der Kokern hat hier Dimension 0, die Gleichung ist also für beliebiges b lösbar.Wählt man stattdessen
- T(x) = 0x1 + 0x2 + 0x3,
dann werden alle Vektoren aus V auf die Null abgebildet und es gilt
Der Lösungsraum der zugehörigen homogenen linearen Gleichung ist also der gesamte dreidimensionale Raum. Der Lösungsraum der inhomogenen Gleichung ist in diesem Fall leer, da die Gleichung nur für b = 0 eine Lösung besitzt. Der Kokern hat Dimension 1.
Wichtige Typen linearer Gleichungen
Lineare Diophantische Gleichungen
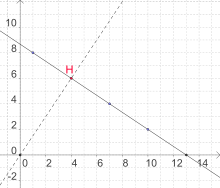 Lösungen der linearen Diophantischen Gleichung
Lösungen der linearen Diophantischen Gleichung
Wählt man Vektorräume
 und
und  über den ganzen Zahlen und
über den ganzen Zahlen undmit konstantem Koeffizientenvektor
 , erhält man die linearen Diophantischen Gleichungen
, erhält man die linearen Diophantischen Gleichungenvon denen ganzzahlige Lösungen
 gesucht werden. Lineare Diophantische Gleichungen besitzen Lösungen, wenn der größte gemeinsame Teiler der Koeffizienten a1 bis an ein Teiler der rechten Seite b ist, also wenn
gesucht werden. Lineare Diophantische Gleichungen besitzen Lösungen, wenn der größte gemeinsame Teiler der Koeffizienten a1 bis an ein Teiler der rechten Seite b ist, also wenngilt. Die Lösungen können dann durch Kombination der Lösungen der homogenen Gleichung mit einer Partikulärlösung, welche mit dem erweiterten Euklidischen Algorithmus gefunden werden kann, angegeben werden.
- Beispiel
Es sind die ganzzahligen Lösungen x = (x1,x2) der linearen Diophantischen Gleichung
gesucht. Da die Koeffizienten a1 = 2 und a2 = 3 teilerfremd sind ist die Gleichung lösbar. Die Gesamtheit der Lösungen ist hier gegeben durch
 mit
mit 
Lineare Vektorgleichungen
Wählt man die Vektorräume
und  sowie
sowiewobei
 eine reelle
eine reelle  -Matrix ist, erhält man die lineare Vektorgleichung
-Matrix ist, erhält man die lineare Vektorgleichungmit rechter Seite
 und unbekanntem Vektor
und unbekanntem Vektor  , welche gerade ein lineares Gleichungssystem darstellt. Eine lineares Gleichungssystem entsteht also durch Zusammenfassen von mehreren skalaren linearen Gleichungen mit ein oder mehreren Unbekannten zu einer Einheit. Die Lösungsmenge eines linearen Gleichungssystems ist dann die Schnittmenge der Lösungen der einzelnen Gleichungen. Ein lineares Gleichungssystem ist genau dann lösbar, wenn der Rang der Koeffizientenmatrix A gleich dem Rang der erweiterten Koeffizientenmatrix
, welche gerade ein lineares Gleichungssystem darstellt. Eine lineares Gleichungssystem entsteht also durch Zusammenfassen von mehreren skalaren linearen Gleichungen mit ein oder mehreren Unbekannten zu einer Einheit. Die Lösungsmenge eines linearen Gleichungssystems ist dann die Schnittmenge der Lösungen der einzelnen Gleichungen. Ein lineares Gleichungssystem ist genau dann lösbar, wenn der Rang der Koeffizientenmatrix A gleich dem Rang der erweiterten Koeffizientenmatrix  ist. Lineare Gleichungssysteme können beispielsweise mit Hilfe des Gaußschen Eliminationsverfahrens gelöst werden.
ist. Lineare Gleichungssysteme können beispielsweise mit Hilfe des Gaußschen Eliminationsverfahrens gelöst werden.- Beispiel
Die allgemeine Lösung des linearen Gleichungssystems mit zwei Gleichungen und drei Unbekannten
ist gegeben durch
 mit
mit
Lineare Differenzengleichungen
Wählt man die Vektorräume V = W = ω als Folgenräume und
erhält man die lineare Differenzengleichung k-ter Ordnung
 für
für  ,
,
wobei die Unbekannte
 eine Folge ist und
eine Folge ist und  sowie b(n) Koeffizienten sind, die zwar von n abhängen dürfen, aber unabhängig von den Gliedern der gesuchten Folge sein müssen. Die Lösung einer Differenzengleichung hängt von den Startwerten
sowie b(n) Koeffizienten sind, die zwar von n abhängen dürfen, aber unabhängig von den Gliedern der gesuchten Folge sein müssen. Die Lösung einer Differenzengleichung hängt von den Startwerten  ab und ist dann eindeutig definiert. Lineare Differenzengleichungen können durch Kombination der Lösung der homogenen Gleichung, die mit Hilfe der charakteristischen Gleichung gefunden werden kann, mit einer Partikulärlösung explizit gelöst werden.
ab und ist dann eindeutig definiert. Lineare Differenzengleichungen können durch Kombination der Lösung der homogenen Gleichung, die mit Hilfe der charakteristischen Gleichung gefunden werden kann, mit einer Partikulärlösung explizit gelöst werden.- Beispiel
Die lineare Differenzengleichung erster Ordnung mit konstanten Koeffizienten
besitzt für den Startwert x0 = c die Lösung
Lineare gewöhnliche Differentialgleichungen
 Lösungen der linearen gewöhnlichen Differentialgleichungen
Lösungen der linearen gewöhnlichen Differentialgleichungen (blau) und
(blau) und  (rot,grün)
(rot,grün)Wählt man die Vektorräume V und W als Funktionenräume mit stetig differenzierbaren Funktionen
 und
und  , erhält man durch Wahl von T als linearen gewöhnlichen Differentialoperator n-ter Ordnung
, erhält man durch Wahl von T als linearen gewöhnlichen Differentialoperator n-ter Ordnungdie lineare gewöhnliche Differentialgleichung
wobei die Koeffizientenfunktionen
 und die rechte Seite g zwar von x, aber nicht von der gesuchten Funktion f und deren Ableitungen
und die rechte Seite g zwar von x, aber nicht von der gesuchten Funktion f und deren Ableitungen  abhängen dürfen. Ist f eine vektorwertige Funktion spricht man von einem linearen Differentialgleichungssystem. Die Existenz und Eindeutigkeit der Lösung gewöhnlicher Differentialgleichungen erster Ordnung gibt der Satz von Picard-Lindelöf. Die allgemeine Lösung der homogenen Gleichung kann über das zugehörige Fundamentalsystem angegeben werden, eine Partikulärlösung kann beispielsweise mittels der Variation der Konstanten gefunden werden.
abhängen dürfen. Ist f eine vektorwertige Funktion spricht man von einem linearen Differentialgleichungssystem. Die Existenz und Eindeutigkeit der Lösung gewöhnlicher Differentialgleichungen erster Ordnung gibt der Satz von Picard-Lindelöf. Die allgemeine Lösung der homogenen Gleichung kann über das zugehörige Fundamentalsystem angegeben werden, eine Partikulärlösung kann beispielsweise mittels der Variation der Konstanten gefunden werden.- Beispiel
Die Lösungen der gewöhnlichen Differentialgleichung erster Ordnung
sind Funktionen der Form
 mit
mit 
Durch Wahl einer Anfangsbedingung, beispielsweise f(0) = k + 1, ist die Lösung dann eindeutig bestimmt.
Lineare partielle Differentialgleichungen
 Lösung der Wärmeleitungsgleichung
Lösung der Wärmeleitungsgleichung
Sind die Vektorräume V und W ebenfalls Funktionenräume, wobei
und stetig differenzierbare Funktionen mehrerer Veränderlicher sind, erhält man durch Wahl von T als linearen partiellen Differentialoperator n-ter Ordnungdie lineare partielle Differentialgleichung
wobei
 ,
,  und
und  sind. Wiederum dürfen die Koeffizientenfunktionen aα und die rechte Seite g zwar von den Koordinaten x1 bis xm, aber nicht von der gesuchten Funktion f und deren partiellen Ableitungen abhängen. Damit die Lösung einer partiellen Differentialgleichung eindeutig bestimmt ist, müssen Anfangs- und/oder Randbedingungen vorgegeben werden. Zur Lösung linearer partieller Differentialgleichungen gibt es verschiedene Ansätze, beispielsweise Fundamentallösungen, die Methode der Charakteristiken oder der Separationsansatz.
sind. Wiederum dürfen die Koeffizientenfunktionen aα und die rechte Seite g zwar von den Koordinaten x1 bis xm, aber nicht von der gesuchten Funktion f und deren partiellen Ableitungen abhängen. Damit die Lösung einer partiellen Differentialgleichung eindeutig bestimmt ist, müssen Anfangs- und/oder Randbedingungen vorgegeben werden. Zur Lösung linearer partieller Differentialgleichungen gibt es verschiedene Ansätze, beispielsweise Fundamentallösungen, die Methode der Charakteristiken oder der Separationsansatz.- Beispiel
Die Lösung der eindimensionalen Wärmeleitungsgleichung für die unbekannte Funktion f(x,t)
als Anfangs-Randwertproblem im Streifen
![[0,1] \times [0,\infty)](a/83a1a24e6cdad28a2faa2111bebd80b4.png) mit den Dirichlet-Randbedingungen
mit den Dirichlet-Randbedingungen  und der Anfangsbedingung
und der Anfangsbedingung  erhält man mittels des Separationsansatzes als
erhält man mittels des Separationsansatzes alsLineare Integralgleichungen
Sind die Vektorräume V und W Funktionenräume ausreichender Integrierbarkeit, erhält man durch Wahl von T als linearen Integraloperator
mit Integralkern K(x,y) und konstantem Vorfaktor λ die lineare Integralgleichung
welche im allgemeinen Fall eine Volterra-Integralgleichung 2. Art darstellt. Sind beide Integrationsgrenzen fest, so handelt es sich um eine Fredholm-Integralgleichung. Ist λ = 0 spricht man von einer Integralgleichung 1. Art.
- Beispiel
Die Volterra-Integralgleichung 1. Art
wird durch
gelöst.
Weitere lineare Operatorgleichungen
Beispiele für weitere lineare Operatorgleichungen mit Funktionen als Unbekannten sind:
- Lineare differential-algebraische Gleichungen
- Lineare Integro-Differentialgleichungen
- Lineare stochastische Differentialgleichungen
Siehe auch
Literatur
- Hans Wilhelm Alt: Lineare Funktionalanalysis: Eine anwendungsorientierte Einführung. 5. Auflage. Springer-Verlag, 2008, ISBN 3-540-34186-2.
- Bernd Aulbach: Gewöhnliche Differenzialgleichungen. 2. Auflage. Spektrum Akademischer Verlag, 2004, ISBN 3-827-41492-X.
- Albrecht Beutelspacher: Lineare Algebra. Eine Einführung in die Wissenschaft der Vektoren, Abbildungen und Matrizen. 7. Auflage. Vieweg, 2009, ISBN 3-528-66508-4.
- Peter Bundschuh: Einführung in die Zahlentheorie. 6. Auflage. Springer-Verlag, 2010, ISBN 3-540-76490-9.
- Gerd Fischer: Lineare Algebra: Eine Einführung für Studienanfänger. 17. Auflage. Vieweg Verlag, 2009, ISBN 3-834-80996-9.
- Jürgen Jost: Partielle Differentialgleichungen: Elliptische (und parabolische) Gleichungen. 1. Auflage. Springer-Verlag, 2009, ISBN 3-540-64222-6.


























































Wikimedia Foundation.